
Fターム[2C150EF34]の内容
玩具 (16,863) | 感知、検出 (1,002) | 感知、検出手段(操縦手段を含む) (510) | 光 (118) | 赤外線 (49)
Fターム[2C150EF34]に分類される特許
1 - 20 / 49
ドットパターンが形成された媒体、ドットパターンを用いた情報入力方法、ドットパターンを用いた情報入出力方法、ドットパターンを用いた情報入力装置、ドットパターンを用いた情報処理装置
【課題】 極小領域であってもコード情報やXY座標情報が定義可能なドットパターン形成媒体を提案する。
【解決手段】 等間隔に所定個数水平方向に配置されたドットと、前記水平方向に配置されたドットの端点に位置する当該ドットから等間隔に所定個数垂直方向に配置されたドットと、前記水平方向に配置されたドットから仮想的に設定された垂直ラインと、前記垂直方向に配置されたドットから水平方向に仮想的に設定された水平ラインとの交点を格子点とし、該格子点からのずれ方でデータ内容 が定義された情報ドットと、からなり、前記垂直方向に配置されたドットの1つは、当該ドット本来の位置からのずらし方によって前記ドットパターンの向き を意味していることを特徴とするドットパターンを形成した。
(もっと読む)
リング型アクチュエータ

【課題】ぬいぐるみや人形への取り付けを誰でも簡単に行うことができ、且つ、汎用性に優れたアクチュエータを提供する。
【解決手段】リング型アクチュエータ1は、ぬいぐるみ2の棒状部位20を取り巻くように取り付けられて使用される。リング型アクチュエータ1には、モータ駆動の回転部材11a,11bが設けられている。この回転部材11a,11bの回転方向及び回転量を制御することで、棒状部位20を任意の方向及び角度で屈曲させる。
(もっと読む)
楽音出力装置
【課題】簡単な操作で本格的な演奏を可能とする。
【解決手段】楽音出力装置10は、状態を切り替えるためのスイッチ1,2,3と、物体の位置を検出する位置センサー16と、スイッチ1,2,3の状態と物体の位置との組み合わせに対して楽音データを対応付けたテーブルを記憶する記憶部と、を備え、位置センサー16により物体の位置が検出された場合に、テーブルを参照して、スイッチ1,2,3の状態と位置センサー16により検出された物体の位置との組み合わせに対応する楽音データを読み出し、当該読み出した楽音データに基づく楽音を出力する。
(もっと読む)
ロボット端末及びロボットシステム
【課題】ロボットが実行できる処理を工夫して、他のロボット端末との間でコミュニケーションを図ることを実現すること。
【解決手段】ロボット端末300に、ロボット端末400との同期をとる同期手段と、人間からのアクションの有無を判定する判定手段と、ロボット端末400と協働して使用者に披露すべきアクションを実行するためのアクションデータが格納されるメモリと、メモリに格納されているアクションデータに基づくアクションを実行する実行手段と、所定時間を計時する時計とを備え、同期手段によってロボット端末400との同期がとられた後であって、時計によって所定時間の計時中に、判定手段によって人間からのアクションがないと判定された場合に、実行手段によってメモリに格納されているアクションデータに基づくアクションを他のロボット端末と協働して実行させる。
(もっと読む)
コンテンツ提供システム、コンテンツ提供方法、及びコンテンツ提供プログラム
【課題】ユーザのコンテンツに対する反応を容易に取得でき、ユーザ嗜好に合ったコンテンツを提供する。
【解決手段】コンテンツ提供システムは、コンテンツを出力する出力部203と、ユーザの挙動を検出するセンサ212から得られる情報に基づいて、ユーザの挙動の種類を判定する判定部208と、出力部203で出力されたコンテンツに対応する判定部208による判定結果に基づいて、出力部203がさらに出力するコンテンツを決定するコンテンツ選択部209とを備える。
(もっと読む)
赤外線通信機能付き玩具自動車
【課題】搭載した携帯型ゲーム装置で車両を制御して遊ぶ。
【解決手段】
車台11に設けた搭載台12上に携帯型ゲーム装置13を配置し、カードスロット28に挿入されたカートリッジ29のカートリッジ側赤外線通信装置31と、車両11の車両側赤外線通信装置32とを対面させ、赤外線信号により、車両1内の車台制御装置18と携帯型ゲーム装置13の演算装置とが通信できるようにする。携帯型ゲーム装置13によって制御されながら、駆動輪21L、21R、22L、22Rが回転し、車両1が走行するが、赤外線通信によって接続されているため、結線の手間が不要となって容易に取り付けができ、移動の際の振動による接続不良は発生しない。
(もっと読む)
赤外線通信機能付き玩具自動車
【課題】搭載した携帯型ゲーム装置で車両を制御して遊ぶ。
【解決手段】
車台11に設けた搭載台12上に携帯型ゲーム装置13を配置し、携帯型ゲーム装置13に設けられたゲーム機側赤外線通信装置31と、車両11の車両側赤外線通信装置32とが対面する状態にして、携帯型ゲーム装置13と車両11との間の信号を赤外線信号により送受信する。携帯型ゲーム装置13によって制御されながら、駆動輪21L、21R、22L、22Rが回転し、車両1が走行するが、赤外線通信によって接続されているため、結線の手間が不要となって容易に取り付けができ、移動の際の振動による接続不良は発生しない。
(もっと読む)
競走玩具
【課題】物足りなさや興趣性の欠如を解消して、従来よりも飽きることなく長く楽しめるようにすること。
【解決手段】自走するための駆動機構12を有する一または複数の第1の走行体1と、自走するための駆動機構を有し、第1の走行体と競走する一または複数の第2の走行体2とを備え、各走行体を自走させて速さの優劣を競う競走玩具100において、第1の走行体は、少なくとも前方及び後方に向けて、第2の走行体の走行を妨害する妨害信号を無線送信する妨害信号送信手段13,14を備え、第2の走行体は、妨害信号を受信する妨害信号受信手段15と、妨害信号受信手段から受信した妨害信号により自身の駆動機構の妨害動作を制御する妨害制御手段16と、を備える。
(もっと読む)
競走玩具
【課題】物足りなさや興趣性の欠如を解消して、従来よりも飽きることなく長く楽しめるようにすること。
【解決手段】自走するための駆動機構12を有する走行体1,2を備え、この走行体を自走させて速さの優劣を競う競走玩具100において、走行体の走行能力に関する複数の走行制御信号を記憶する信号記憶手段34と、信号記憶手段に記憶された走行制御信号の中の一つをランダムに選択する選択制御手段40と、を備え、走行体は、選択制御手段により選択された走行制御信号により、走行体の走行能力を上昇又は下降させる走行制御手段16を備える。
(もっと読む)
対話式の玩具
線路配置と、線路に沿って進むように構成された複数の車両と、線路に着脱可能に結合された複数の目的地とを含む対話式の玩具トレインシステム。車両は、互いに通信するように構成され、車両は、目的地の1つ又は複数と通信するように更に構成される。システムは、ネットワークプロトコルを有する赤外線玩具ネットワークを含み、どれが存在しどれが存在しないかを判定し、それによって複数の車両及び目的地が知的に干渉なく会話できるようにする。 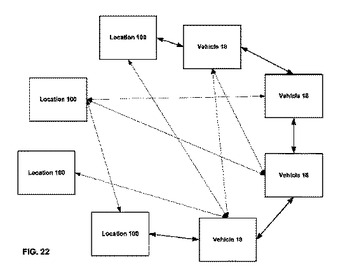 (もっと読む)
(もっと読む)
移動玩具
【課題】発光素子による効果的な光演出を実現できる移動玩具の提供。
【解決手段】移動玩具10は、ボディ12と、ボディ12に搭載され、移動玩具10を移動させる原動機と、少なくとも1つの発光素子LEDb〜LEDdと、発光素子LEDb〜LEDdを駆動して発光を制御する発光素子駆動部を含む。ボディ12の少なくとも一部に対して、背景領域BRb〜BRdと背景領域BRb〜BRdとは光透過特性が異なる模様領域TRb〜TRdとを有する光演出領域LRb〜LRdが設定される。発光素子LEDb〜LEDdはボディ12の裏側から光演出領域LRb〜LRdに向けて光を照射する。
(もっと読む)
走行玩具システム及び走行玩具
【課題】比較的簡易に送信器側に向けてより真っ直ぐに走行することが可能な走行玩具システム及び走行玩具を提供する。
【解決手段】走行玩具システム1は、一定の信号を送信する送信器10と、送信器10からの一定の信号を受信して走行する走行玩具20からなる。また、走行玩具20は、送信器10からの一定の信号を受信する受信器21と、受信器21にて一定の信号が左側から受信された場合に左折動作を選択し、受信器21にて一定の信号が右側から受信された場合に右折動作を選択し、且つ、受信器21にて一定の信号が前方から受信された場合に直進動作を選択する選択部22aと、選択部22aにより選択された動作による走行を制御する走行制御部22bとを備えている。
(もっと読む)
走行玩具システム
【課題】スピード感あるレースなどの走行を行うにあたり、比較的自由な走行を楽しむことが可能な走行玩具システムを提供する。
【解決手段】走行玩具システム1は、複数のゲート10と、当該複数のゲート10を通過走行する走行玩具20とからなる。複数のゲート10は、それぞれ走行玩具20に対して走行信号を送信する送信器11を有している。走行玩具20は、送信器11からの走行信号を受信する受信器21と、受信器21にて走行信号を左側から受信した場合に左折動作を選択し、受信器21にて走行信号を右側から受信した場合に右折動作を選択し、且つ、受信器21にて走行信号を前方から受信した場合に直進動作を選択する選択部22aと、選択部22aにより選択された動作による走行を制御する走行制御部22bとを有する。
(もっと読む)
移動玩具、プログラム、情報記憶媒体、およびゲーム装置。
【課題】移動玩具のデータ用センサでコースデータ等のデータを適正に読み取る。
【解決手段】コース60上を移動する移動玩具10であって、ボディ12と、ボディに搭載され、所与の動力が供給されて移動玩具を移動させる原動機30と、移動玩具がデータを読み取るためにコースに設けられる複数のデータマーカDM1〜DMnを検知するデータ用センサ50aと、データをサンプリングするためのクロックを読み取るためにコースに設けられる複数のクロックマーカCM1〜CM16を検知するクロック用センサ50bと、クロック用センサの検知信号から抽出されたクロックにより、データ用センサの検知信号をサンプリングすることでデータを抽出する制御部310と、を含む。
(もっと読む)
ロボット玩具
【課題】簡易な構造により小型化を可能にする。
【解決手段】制御基板251は主面が玩具本体2の正面を向くように玩具本体2の内部に起立して設置され、玩具本体2の内部空間27は制御基板251の主面側で上部空間273、中部空間274及び下部空間275に仕切られ、このうち下部空間275にはコイル244を有する左右の脚部24,24が設けられ、上部空間273及び中部空間274には赤外線受信部211及び電池221が設置される。
(もっと読む)
ヘリコプタ玩具
【課題】機体を安定して上昇させることができ、上昇後に機体を操作することが容易な構成であり、また、構成がシンプルであるために製造コストが安いヘリコプタ玩具を提供する。
【解決手段】本体の両側に延在する少なくとも一組の主翼の端部に配置される少なくとも一組のメインロータと、前記本体の後方に延在する尾部に配置されるテールロータと、本体内部に設けられて各メインロータの回転速度とテールロータの回転速度とをそれぞれ独立して個別に調節するコントローラとを備え、前記メインロータの中心軸が両主翼に対して両ロータがそれぞれ本体から離隔する方向に傾斜するように配置されることを特徴とする。
(もっと読む)
機能ブリックを有する玩具組立システム
組立要素を分離可能に相互接続するための連結手段を有する組立要素を備える玩具組立システムである。該玩具組立システムは前記連結手段を有する機能組立要素を備え、該機能組立要素はそれぞれ、制御可能な機能を実行するようになっている機能デバイスと、前記制御可能な機能を実行するために前記機能デバイスにエネルギーを提供するためのエネルギー源と、を有する。前記各機能組立要素は、制御信号をコード化した可視光を受信するための光センサーと、該光センサー及び前記機能デバイスに接続され、前記受信した制御信号をデコードすると共に該デコードした制御信号に応答して前記制御可能な機能を制御するようになっている制御回路とを備える。 (もっと読む)
プロペラにより浮遊する玩具
【課題】 屋内等においてホバリング動作を自動的に行うことができるプロペラにより浮遊する玩具(ヘリコプタ玩具)を得る。
【解決手段】 リモコン操作によって空中浮揚させることが可能なヘリコプタ玩具1は、無線操縦によりリモコン制御部により操縦される。そのヘリコプタ玩具本体2は、上下、左右、前後の最大6方向での障害物までの距離を測定する距離センサ(赤外線センサまたは超音波センサ)11〜16を備える。さらに、距離センサによる測定結果に基づいて所定位置での空中静止状態を維持するためのホバリング制御部20を備える。
(もっと読む)
走行監視システム
【課題】興趣性の高い走行監視システムを提供すること。
【解決手段】動力源を持ちその動力によって走行する走行玩具と、所定の場所に設置される走行監視装置とを備え、前記走行玩具と前記走行監視装置との間で赤外線信号の送受信が可能に構成され、前記走行監視装置は、前記走行玩具から送信される赤外線信号に基づいて該走行玩具の接近を検知した時に該走行玩具に向けて赤外線による動作指令信号を送信するとともに、該走行監視装置を含む該走行玩具以外の周辺装置に前記動作指令信号の送信以外の所定の動作をする又は所定の動作させる一方で、その動作指令信号を送信された前記走行玩具は該動作指令信号に基づいてそれまでの動作とは質的又は量的に異なる所定の動作をするように構成されている。
(もっと読む)
走行玩具用操舵制御装置及び走行玩具
【課題】自律的に前方の障害物との衝突を回避することのできる走行玩具用を提供する。
【解決手段】操舵装置20によって前輪2c,2cの向きを変える走行玩具1の操舵制御装置18であって、異なる波長の赤外線λ1,λ2を発する発光部11,12と、前記走行玩具1の前方斜め左右方向の障害物によって反射した赤外線λ1,λ2の反射光を受光する受光部13と、受光部13が受光した赤外線の波長に応じて前輪2c,2cの向きを所定の時間だけ前記障害物との衝突を回避する方向に変えるよう操舵装置20を制御するコイル通電制御部19とを備える。
(もっと読む)
1 - 20 / 49
[ Back to top ]