
Fターム[2D003FA02]の内容
Fターム[2D003FA02]に分類される特許
81 - 100 / 568
油圧式作業機械における暖気運転制御装置
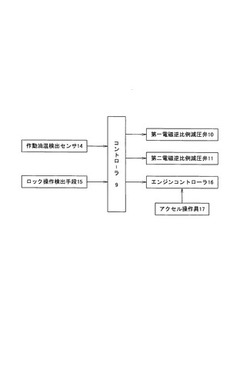
【課題】油圧式作業機械において、作動油を昇温させる暖気運転を行なうにあたり、制御バルブを中立位置に保持した状態で、効率良く短時間で行なえるようにする。
【解決手段】作動油の温度が設定温度未満で、且つ、油圧ロックレバーがロック操作されている場合に、コントローラ9から第一、第二電磁逆比例減圧弁10、11及びエンジンコントローラ16に制御指令を出力して、第一、第二油圧ポンプの容量を最大にし、且つ、エンジン回転数を最大にすることで、制御バルブを中立位置に保持した状態で、第一、第二油圧ポンプの吐出流量を最大にして暖気運転を行なう構成にした。
(もっと読む)
積込量管理システム及び積込量管理方法

【課題】運搬車両への積込物の積込量を精度よく管理すると共に、システムコストを抑える。
【解決手段】積込量管理システム10は、旋回角度センサ120によるバケットの位置の検出結果に基づいて、バケットが所定の積込位置まで移動したか否かを判定するバケット位置解析部24Bと、バケット角度センサ126によるバケットの角度の検出結果に基づいて、バケットが所定の開放角度まで開放動作したか否かを判定するバケット角度解析部24Cと、バケット位置解析部24Bによりバケットが所定の積込位置まで移動されたと判定された状態で、バケット角度解析部24Cによりバケットが所定の開放角度まで開放動作されたと判定された場合に、計測された1回分の積込量W1を累積積込量Lに積算する積算部24Eと、を備える。
(もっと読む)
作業機の干渉防止装置
【課題】昇降キャブと多関節の作業アームを備える作業機における、干渉防止装置の制御演算を簡単にする。
【解決手段】キャブ最下位置と最上位置とによって予め設定した制限域である、円弧状制限域(LMN)または直線状制限域(PQHIMN)をもとに作業アームの動きを制限する。
(もっと読む)
建設機械の油圧駆動装置
【課題】燃費を改善することができる建設機械の油圧駆動装置を提供する。
【解決手段】メインエンジン30によって駆動するメインポンプ32と、サブエンジン34によって駆動するサブポンプ36と、メインポンプ32及びサブポンプ36から吐出された圧油を、方向切換弁を介し油圧アクチュエータに供給する建設機械の油圧駆動装置であって、いずれかの油圧アクチュエータが操作状態にある場合、メインエンジン30を定常回転数に、全ての油圧アクチュエータが非操作状態であって所定時間が経過した場合、メインエンジン30を低速回転数に制御するメインエンジン制御装置31と、走行用油圧モータ12A及び12Bが操作状態にある場合、サブエンジン34を定常回転数に、走行用油圧モータ12A又は12Bが非操作状態であって所定時間が経過した場合、サブエンジン34を低速回転数に制御するサブエンジン制御装置35とを備える。
(もっと読む)
メンテナンス情報管理装置および作業機械
【課題】メンテナンスの時期に関する情報を正しく算出できるメンテナンス情報管理装置および作業機械を提供する。
【解決手段】各ユニットのエネルギに関する情報、すなわち、各ユニットが伝達するエネルギに関する情報に基づいてメンテナンス時期を推定するように構成した。これにより、従来技術のように、消耗品の負荷を代表させる代表値に基づいて消耗品のメンテナンス時期に関する情報を導出する場合と比べて、メンテナンス時期に関する情報を正しく導出できるようになる。したがって、各ユニットのメンテナンスを効率的に行うことができるようになる。
(もっと読む)
無人車両の走行システムおよびその走行制御方法
【課題】両側積込みで無人車両に走行指令を与えるに際して、左右の判断や左右指示ボタンによる操作を不要とし、作業性を向上させる。また、両側積込みで積込み点の位置を設定するに際して、左右の判断や左右指示ボタンによる操作を不要とし、作業性を向上させる。
【解決手段】両側積込みで無人車両に走行指令を与えるに際して、走行指令が指示されたときの作業機の向きまたは位置と、境界線の方向または位置とを対比して、積込機の作業機が左積込み点側に位置されたか、あるいは右積込み点側に位置されたかを判別する。また、両側積込みで積込み点の位置を設定するに際して、積込み点の位置設定が指示されたときの作業機の向きまたは位置と、境界線の方向または位置とを対比して、積込機の作業機が左積込み点側に位置されたか、あるいは右積込み点側に位置されたかを判別する。
(もっと読む)
建設機械
【課題】作業機の誤操作を抑制可能な建設機械を提供する。
【解決手段】建設機械100は、シートベルトセンサ220と制御部350とを備える。シートベルトセンサ220は、シートベルト200bがオペレータPの胴体部に装着されているか否かを検出する。制御部350は、シートベルト200bがオペレータPの胴体部に装着されていない場合、操作具160による作業機60の操作を実行不能とする。
(もっと読む)
作業機械
【課題】油圧アクチュエータが駆動されることなくエンジン再始動を容易にし、燃料消費量や排出する二酸化炭素量を低下させる。
【解決手段】エンジン40によって駆動される油圧ポンプ42と、油圧アクチュエータ21,22,23,31,32と、発電電動機44が発電動作した場合の電力を蓄積する一方、発電電動機44が電動動作する場合に電力を供給する蓄電器61とを備え、操作レバー50,70の操作により油圧アクチュエータを動作させる作業機械において、停止条件が充足した場合にエンジン40のアイドリング運転を停止させるアイドリング停止制御手段110と、アイドリング停止制御手段110によってエンジン40が停止された状態においてエンジン再始動スイッチ77から始動指令が出力された場合にPPCロックレバー79が退避位置に配置されていることを条件にエンジン40の再始動許可を行うエンジン再始動制御手段120とを備える。
(もっと読む)
建設機械の油圧駆動装置
【課題】 旋回ハーフ操作を他の操作と複合して行ったときの圧力損失を抑えることができ、エネルギ効率等を向上できるようにする。
【解決手段】 第1の制御弁群26は、センタバイパス管路20の上流側から下流側へと順次接続された旋回用制御弁27、ブーム用制御弁29、アーム用制御弁31およびバケット用制御弁33を含んでいる。旋回ハーフ操作により旋回用制御弁27が中立位置から切換えられて旋回モータ3Aが駆動し始めると、コントローラ78からの信号で切替弁71A,71B,72A,72B,73A,73Bを切替ることにより、作業用方向制御弁であるブーム用制御弁29、アーム用制御弁31およびバケット用制御弁33を全て中立位置に戻す。これにより、第1の制御弁群26での圧力損失によるエネルギロスを低減させる。
(もっと読む)
ハイブリッド建設機械の制御装置
【課題】エンジンと蓄電装置とを動力源として負荷を駆動せしめるハイブリッド建設機械において、該ハイブリッド建設機械の負荷状態に応じてエンジンの出力を制御するにあたり、エンジンの急激な出力変動を抑制する。
【解決手段】蓄電装置34の充電量、蓄電装置34の充電量の増減変化、負荷の消費動力、負荷の消費動力の増減変化の少なくとも一つを前件部とし、エンジン12の出力を後件部とするファジィルールに基づいてエンジン12の出力の増減を推論するファジィ推論部42を設け、該ファジィ推論部42の推論結果に基づいてエンジン12の出力を制御する構成にした。
(もっと読む)
油圧ショベルの油圧回路
【課題】油圧シリンダの再生回路において、戻り油を全量再生して、一部をタンクへ逃がすことによる熱エネルギロスを無くすと共に、再生手段のハンチングに依る操作不良を防止する。
【解決手段】再生弁37は、途中で絞りながら戻り油を一部タンクへ逃がす方式でなく、全開または遮断の切換方式とし、その制御を、シリンダのボトム室側圧力Pcに基づいて行うと共に、再生時に再生を解除する第1の所定値と、再生解除時に再生を開始する第2の所定値を設けてハンチングを防止するものである。なお、第2の所定値は第1の所定値からは大幅に異なる値が取られている。
(もっと読む)
ハイブリッド型作業機械
【課題】 キャパシタの劣化を簡単に精度良く判定することのできるハイブリッド型作業機械を提供することを課題とする。
【解決手段】 電動発電機12を発電運転して電動発電機12から出力された電力として現充電エネルギを算出する。蓄電器19の初期静電容量に基づいて、現充電エネルギが蓄電器19に供給された際に蓄電器19に蓄積される電力として仮想充電エネルギを算出する。現充電エネルギと仮想充電エネルギとを比較して蓄電器19の劣化を判定する。
(もっと読む)
作業機械の制御装置
【課題】
作業機械の作業アタッチメントを標準仕様のものから特殊仕様のものに交換しても、標準仕様のものと殆ど変わらない操作具の操作性を発揮できるようにする。
【解決手段】
作業アタッチメント4が標準仕様のものから特殊仕様のものへ交換可能な油圧ショベル1において、交換された各作業アタッチメントに応じて各シリンダ8、9、10への流量を補正するにあたり、該流量補正は、作業アタッチメントを第一、第二姿勢にして特殊仕様の各作業アタッチメントの軸心回りの最大モーメントを演算し、該演算された各最大モーメントと標準仕様のものの各最大モーメントとを比較し、該比較に基づいて流量制御弁の補正開度量を設定し、該設定された補正開度量に基づいて各流量制御弁の流量補正を行う。
(もっと読む)
建設機械
【課題】電動機で駆動するパイロットポンプを備えた建設機械において、パイロットポンプの吐出圧が供給されるパイロット油圧源回路の圧力を設定値に保持するにあたり、リリーフ損をなくすと共に、安定した状態で確実に設定値に保持できるようにする。
【解決手段】パイロット油圧源回路46の圧力を検出する圧力センサ47と、パイロットポンプ用電動機19のトルクを制御する制御装置22とを設けると共に、制御装置22は、前記圧力センサ47により検出されるパイロット油圧源回路の圧力Pを入力し、該検出圧力Pとパイロット設定圧Psとの圧力差ΔPをなくすべくパイロットポンプ用電動機19のトルクを制御する。
(もっと読む)
作業機械の電動機トルク制御装置
【課題】制御ゲインを適正に補正し、制御の安定性及び応答性を両立させる。
【解決手段】本発明の実施形態に係る電動機トルク制御装置10は、トルク指令Trdの演算に用いる制御ゲインG1を補正する制御ゲイン補正手段18を備えている。制御ゲイン補正手段18は、所定時間毎に電動機9の速度変化を予測すると共に、予測した速度変化Δωpと実際の速度変化Δ’ωとを比較し、該比較結果に応じて制御ゲインG1を補正する。
(もっと読む)
作業機械の電動機トルク制御装置
【課題】制御ゲインを適正に補正し、制御の安定性及び応答性を両立させる。
【解決手段】本発明の実施形態に係る電動機トルク制御装置10は、トルク指令Trdの演算に用いる制御ゲインG1を補正する制御ゲイン補正手段18を備えている。制御ゲイン補正手段18は、所定時間毎に電動機9の速度変化Δ’ωを演算すると共に、トルク指令Trd(予測トルクTr)に対する速度変化Δ’ωの比率kに応じて制御ゲインG1を補正する。
(もっと読む)
作業機械の旋回用油圧制御装置
【課題】エネルギーロスを低減することができるとともに、汎用性に優れた作業機械の旋回用油圧制御装置を提供する。
【解決手段】旋回モータ35に供給される作動油の流入方向と流入流量とを制御する旋回用制御弁5と、旋回用制御弁5のスプールの位置に応じたネガコン圧PNBを取り出すためのネガコン油路LNとを備える。
旋回モータ35に流入する作動油の圧力が予め設定されたリリーフ圧に達したときに開弁するオーバーロードリリーフ弁9と、オーバーロードリリーフ弁9から流出した作動油の余剰流量に相当する値POを検出する余剰検出手段16とを備える。
旋回モータ35の単独駆動時に、余剰検出手段16の検出した値POに応じてネガコン油路のネガコン圧PNBを補正した補正ネガコン圧PNAで、油圧ポンプ2の吐出流量を制御する制御手段20を備える。
(もっと読む)
建設機械のフロント作業機における稼働状態記録装置
【課題】建設機械のフロント作業機の稼働状態記録装置を、フロント作業機の姿勢に対応する稼働データが記録されるように構成する。
【解決手段】 稼働状態記録装置を、フロント作業機4のバケット刃先7aに作用する荷重を演算するバケット刃先縦、横荷重演算部43、45と、バケット刃先7aによる作業範囲を一定の間隔で仕切って複数の作業ゾーンとして記憶する作業位置データ部31bと、バケット刃先7aが位置する作業ゾーンを判断し、バケット刃先7aが前記作業ゾーンに位置するときのバケット刃先縦、横荷重演算手段43、45からの演算値を、予め設定される所定時間毎に演算処理してフロント作業機4の稼働状態に係わる複数の稼働データを作成する稼働データ演算手段46と、バケット刃先7aが任意の作業ゾーンから他の作業ゾーンに移行するまでのあいだの稼働データを、作業ゾーン毎に、稼働データ毎に集計して記録するデータ記録部36とを備えて構成する。
(もっと読む)
ハイブリッド式建設機械
【課題】搭載されたキャパシタ等の蓄電デバイスの劣化に関する特性を精度良く測定できるハイブリッド式建設機械を提供する。
【解決手段】ハイブリッド式建設機械において、電動モータ25と油圧モータ27の両方を駆動して、旋回体20の駆動を行う油圧電動複合旋回モードと、油圧モータ27のみを駆動して旋回体20の駆動を行う油圧単独旋回モードとの切替えを行う制御装置80を備え、制御装置80は、油圧単独旋回モードにおいて、蓄電デバイス24の内部抵抗または静電容量の測定を行う制御手段82と、測定終了後に油圧電動複合旋回モードに切替える制御切替え手段85とを備えた。
(もっと読む)
電動ショベル、モニター装置を備えたショベル及びショベルのモニター装置
【課題】ショベルにおいて、各部の駆動源の応答性を向上すると共に、省エネルギー化を達成する。
【解決手段】 走行部Aと旋回部Bと作業部Cからなる電動ショベルであって、前記旋回部Bに備えられたエンジン1と、このエンジン1と機械的に接続された状態で前記旋回部Bに備えられ、このエンジン1の動力を電気エネルギーへ変換する発電機5,6,7と、この発電機5,6,7と電気的に接続された状態で前記旋回部Bに備えられ、この発電機5,6,7で発生させた電気エネルギーを蓄えるバッテリと、前記旋回部Bに備えられ、前記発電機5,6,7とともに発電装置2を構成する変換装置(インバータ)と、前記旋回部Bに備えられ、処理プログラムが記憶されるとともに、操作入力装置からの操作指令、及び、各種センサからのデータに基づき前記処理プログラムによって演算を行う制御装置10とを有する。
(もっと読む)
81 - 100 / 568
[ Back to top ]