
Fターム[2D003FA02]の内容
Fターム[2D003FA02]に分類される特許
141 - 160 / 568
可動機械用のテザー追跡システムおよび同方法
可動機械(12)用のテザー追跡システム(28)が開示される。テザー追跡システムは、可動機械に配置されて、可動機械が作業現場を移動して回るときに、可動機械から固定供給源(14)まで延びるテザー(16)を選択的に取り出し、巻き取るスプール(26)を有することができる。テザー追跡システムはまた、スプールパラメータを示す第1の信号を生成する、スプールに付属する少なくとも1つのセンサ(32)と、可動機械の位置を示す第2の信号を生成する、可動機械に付属する位置特定システム(33)と、少なくとも1つのセンサおよび位置特定システムと通信するコントローラ(34)とを有することができる。コントローラは、第1および第2の信号に基づいて、テザー回避ゾーン(24)を定めるように構成することができる。  (もっと読む)
(もっと読む)
作業機の表示装置
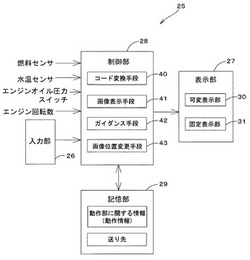
【課題】動作部に関する情報を表示して容易に外部に送信することができるようにする。
【解決手段】作業機の動作部が動作したときの動作状態を表示する表示部27と、動作部に関する情報を記憶する記憶部29とを備え、記憶部29に記憶された1の情報を1の画像データに変換すると共に、1の情報とは異なる他の情報を他の画像データに変換するコード変換手段40と、1の画像データと他の画像データとを表示部27に表示する画像表示手段41とを備えている。
(もっと読む)
作業機の故障診断支援システム

【課題】作業機の故障箇所を手間を掛けずに素早く推定することができるようにする。
【解決手段】作業機1の各部位における動作状況をネットワークを介して送信する状況送信手段51と、動作状況を受信して当該動作状況から作業機1の故障を診断する故障診断手段52と、修理実績を有する故障診断用データベース53とを備え、故障診断手段52は、作業機1の各部位における動作状況を取り込む状況取込部55と、状況取込部55に取り込まれた各部位の動作状況と修理実績とを基に故障を自動的に推定する故障推定部56とを備えている。
(もっと読む)
油圧ショベルの作業腕制御装置
【課題】簡単な構成で、水平面、法面などの均し作業を行うことができ、かつオペレータにとって操作が容易な、油圧ショベルの作業腕制御装置を提供する。
【解決手段】制御装置26を備え、制御装置26は、作業腕12のアーム16およびアーム16を連結したブーム14のアームシリンダ20およびブームシリンダ18の同時操作によって作業具が連結されるアーム16の先端が一定の時間略直線の軌跡Kに沿って移動しているときには、アーム16の作業具連結中心17とブーム14のアーム連結中心15を結ぶ連結線Lがこの直線軌跡Kに対して直角に近づくにつれ、ブームシリンダ18の作動速度をブーム操作器24の操作に応じた速度よりも遅くする。
(もっと読む)
旋回素子を備える作業装置の高さを決定するための方法および制御装置
本発明は、旋回素子を備える作業装置の可変の作業高さを決定するための方法であって、作業高さを得るために作業装置(1)の旋回素子(2)による線形運動が行われる方法に関する。粗野な環境条件においても作業高さの決定時に正確な結果を得るために、旋回素子(2)が進んだ高低差(Δh)から得られる差圧(Δp)を決定することにより作業高さの検出を行う。 (もっと読む)
作業機械の油圧ブレーカ制御装置
【課題】作業腕に取付けたブレーカの破砕対象物への過度の押付けや空打ちを防止することができる制御装置を提供する。
【解決手段】ブレーカ制御弁をON・OFFするブレーカ操作器と、ブレーカを押付ける油圧シリンダに所定圧力の圧油を切換え自在に供給する圧油供給手段と、押付け油圧力を検出する圧力検出器と、ブレーカ作動のON・OFFを指令するブレーカスイッチと、コントローラを備え、ブレーカスイッチONのときに圧油供給手段の圧油を油圧シリンダに供給するとともに、ブレーカ操作器OFFで、押付け油圧力が所定圧力を超えたときは、ブレーカ操作器をONにしてブレーカを作動させ、ブレーカ操作器ONで、押付け油圧力が所定圧力以下のときは、ブレーカ操作器をOFFにしてブレーカを停止させる。
(もっと読む)
作業機械の適合性確認方法
【課題】作業機械の出荷時に登録された稼働地域特性に応じた機体仕様と、実際の稼働現場の環境情報との適合性を自動的に確認できる作業機械の適合性確認方法を提供する。
【解決手段】位置取得機能および無線通信機能を備えた作業機械11から実際の稼働現場A,B,Cの環境情報(位置、高度および外気温など)を取得して管理部15の動態管理サーバ15aに定期的に送信させ、この動態管理サーバ15aは、作業機械11の出荷時に登録された稼働地域特性に応じた機体仕様(寒冷地仕様機11A、酷暑仕様機11B、防錆仕様機11C)と、実際の稼働現場A,B,Cの環境情報との適合性をチェックする。予め登録された機体仕様と実際の稼働現場A,B,Cの環境情報とが一致しない場合は、動態管理サーバ15aから機体ミスマッチ警告を出力するとともに、顧客管理サーバ15bから販売店4の端末機器などに機体仕様の変更を提案指示する。
(もっと読む)
アーティキュレート車両における小旋回制御装置
【課題】車両オペレータの操作体による単純な小旋回用ブレーキ操作によって左右いずれか一方の車輪ブレーキを自動的に選択しつつ、制動力は車両オペレータの手動感覚で任意に調整できるアーティキュレート車両における小旋回制御装置を提供する。
【解決手段】メインブレーキマスタシリンダ51とは別に設置した小旋回ブレーキマスタシリンダ56からハンドブレーキレバー58の操作量に応じて発生し左右の車輪ブレーキ37,38または39,40に制動力として作用する制動圧の供給を、旋回内側に対応する左小旋回制御弁62または右小旋回制御弁64のいずれか一方により制御する。左小旋回制御弁62または右小旋回制御弁64のいずれか一方は、アーティキュレート角センサからの信号によりコントローラが自動的に選択して弁開状態に制御する。車両オペレータは、制動力を実感しながら車体の安定性を保持できるように微妙な調整を行なうことができる。
(もっと読む)
作業車両
【課題】作動油が低温の場合に油圧モータの容量制御においてハンチングが発生することを抑えることができる作業車両を提供する。
【解決手段】 作業車両では、制御部は、駆動油圧検知部によって検知される駆動油圧が所定の目標駆動油圧に近づくようにフィードバック制御によりモータ容量制御部を制御する。また、制御部は、油温検知部によって検知された作動油の温度が所定温度より低い場合には、油圧モータの最大容量を低下させる低温時モータ容量制限制御を実行する。
(もっと読む)
ショベルクレーン
【課題】クレーン仕様の場合、吊り荷重が重くなるほど旋回速度を遅くなるようにした、また旋回アクチュエータの単独操作あるいは他のアクチュエータとの連動操作においても吊り荷重が重くなるほど旋回速度が遅くなるようにしたショベルクレーンを提供する。
【解決手段】クレーン仕様のときには油圧ポンプの吐出流量および投入馬力を、作業アームの吊り荷重が重くなるほど小さくなるように制御する、制御装置を備える。また、制御装置は、旋回アクチュエータの単独操作のときには他のアクチュエータとの連動操作のときよりも、油圧ポンプの吐出流量および投入馬力の閾値を小さく設定する。
(もっと読む)
作業機械の遠隔管理システム
【課題】エンジン回転数の上限をオペレータによるその上限の設定よりも優先して遠隔管理できる作業機械の遠隔管理システムを提供すること。
【解決手段】油圧ショベルは制御手段10と、3種類の作業モードを選択的に指令する指令スイッチ13とを有し、制御手段10は各作業モードに対応付けられた目標回転数の上限を記憶した目標回転数記憶手段11b1と、記憶された目標回転数の上限のうちの1つを指令スイッチ13による指令に応じ選択し、その上限以下の範囲の目標回転数を演算する目標回転数演算手段11cと、通信装置11aとを有する。基地局2のサーバ3は、作業モード記憶手段3f2により記憶された作業モードの中から1つを入力装置4による指令に応じて選択し通信装置3gを用いて制御手段10に指令する。目標回転数演算手段11cはサーバ3から作業モードを指令された場合、その作業モードに基づき目標回転数を演算する。
(もっと読む)
制御装置
【課題】ショック圧による液圧回路の配管や構成機器の破損を防止することができる制御装置を提供すること。
【解決手段】リリーフバルブ13の下流側に接続される第2配管14に上流圧力センサ17及び下流圧力センサ18を接続して、第2配管14の内部の油圧を測定することで、リリーフバルブ13の開閉を感知する。その結果、馬力が一定となるように制御されたポンプ10の最大流量を低減させる。よって、油圧モータ11の負荷が低下した場合に、ポンプ10から送出される油の量を低減することができる。その結果、ポンプ10に接続された第1配管12および油圧モータ11を介して第1配管12に接続される第2配管14の内部にショック圧が生じることを防止して配管の破損を防止することができる。
(もっと読む)
掘削支援装置
【課題】簡易、かつ、コストが安価な建設機械の掘削支援装置を提供する。
【解決手段】ブーム回動角度α、アーム回動角度β、バケット回動角度γをそれぞれ検出する各角度センサ7〜9と、バケット先端60が目標掘削面Dに位置したときに操作される制御スイッチ18と、制御スイッチ18の操作を受けて、各回動角度に基づきブーム4の回動支点を基準としたバケット先端60の位置を演算して目標掘削面Dに沿う掘削軌道を設定する演算手段と、ブーム4の動作を自動制御する制御手段とを備える。制御手段は、アーム5の掘削方向の動作時に、バケット先端60が掘削軌道上を移動するようアーム回動角度βの変化に応じてブーム回動角度αを変化させ、アームの掘削方向とは逆方向の動作時に、バケット先端60が掘削軌道よりも所定高さ上方を移動するようアーム回動角度βの変化に応じてブーム回動角度αを変化させる。
(もっと読む)
油圧作業機のポンプ傾転制御装置
【課題】ポンプ傾転を精度良く目標ポンプ傾転に制御できる傾転制御装置を提供する。
【解決手段】油圧アクチュエータ5に駆動圧を供給する可変容量型の油圧ポンプ2と、ポンプ傾転制御用の制御圧を発生する油圧切換弁13と、油圧切換弁13の駆動に応じて油圧ポンプ2のポンプ容量を変更する傾転制御用ピストン12と、油圧切換弁13を駆動するための指令圧P0を出力する比例電磁弁14と、指令圧P0に対抗して油圧切換弁13に作用する背圧Pdを演算するドレン圧演算回路36と、ドレン圧演算回路36により演算された背圧に応じて指令圧P0を補正するコントローラ20とを備える。
(もっと読む)
建設機械
【課題】従来から知られている建設機械では、燃費向上など効率的な運転操作を行うための報知技術に着目しており、作業中にオペレータが行った運転操作の内容に基づいて何らかの制御を変更するものではなかった。
【解決手段】オペレータの疲労度Hを算出する演算式としてH=Ws×Ts十Wr×Tr十Wk×Tkを用いる。ここで、Ws・Wr・Wkはオペレータが旋回・走行・掘削操作をしたとき、単位時間内における作業負荷を表す重み係数である。Ts・Tr・Tkは旋回時間・走行時間・掘削時間の総和である。算出された疲労度Hが所定の閾値を超えたとき(S16)には、運転支援システムを疲労処理モード(S18)に変更する。
(もっと読む)
建設機械の油圧制御装置
【課題】作業装置の搬送対象物の重量が変化しても旋回ブーム上げの操作性が良好な建設機械の油圧制御装置を提供すること。
【解決手段】建設機械の油圧制御装置において、上部旋回体1を旋回する旋回モータ24と、旋回モータ24に作動油を供給する油圧ポンプ30と、ブームシリンダ16に作動油を供給する油圧ポンプ20と、ブームシリンダ16のボトム圧Pbを検出する圧力センサ37と、バケット12内の重量が変化しても、旋回ブーム上げ動作における上部旋回体1の旋回速度とブーム10の上昇速度とのバランスの変化が抑制されるように定めた旋回モータ24の目標容量であって、圧力センサ37で検出されるボトム圧Pbごとに定めた目標容量qmに、旋回モータ24の容量を設定する制御油圧回路103を備える。
(もっと読む)
ハイブリッド式建設機械のエンジン回転数変化低減制御システム及び方法
【課題】ハイブリッド式建設機械のエンジン回転数変化低減制御システム及び方法を提供する。
【解決手段】エンジン10と、エンジン10により駆動される油圧ポンプ13と、エンジン10により駆動されて発電し、エンジン10を補助するモータとして油圧ポンプ13を駆動させるモータ‐発電機17と、モータ‐発電機17により発電された電気エネルギーを充電するバッテリ19とを含んでなるハイブリッド式建設機械の制御システムにおいて、油圧アクチュエータ15の駆動に必要な油圧ポンプ13の出力トルクを検出するトルク検出手段40と、トルク検出手段40により検出された油圧ポンプ13の出力トルクの変化が一定量以上になり、エンジン回転数のドロップが発生すると判定された場合、エンジン出力を補助するようにモータ‐発電機17のモータ作動を制御するハイブリッド制御手段50とをさらに含む。
(もっと読む)
建設機械のポンプ駆動装置
【課題】小出力時であって、油圧アクチュエータの要求流量が大きいときにも、何ら制限を受けることなくエンジン回転数を小出力に応じた低い回転数にすることができる建設機械のポンプ駆動装置の提供。
【解決手段】エンジン11と、このエンジン11によって駆動される油圧ポンプ12と、この油圧ポンプ12の吐出流量を指令する指令流量信号を出力する流量指令手段、例えば操作レバー13とを備えた油圧ショベルのポンプ駆動装置において、エンジン11と油圧ポンプ12との間に設けられ、変速比を変更可能な変速機16と、油圧ポンプ12の目標回転数Nを、エンジン11の実回転数Neで除して変速比Iを演算し、この演算した変速比Iで変速機16を制御する変速機制御手段、例えばコントローラ17とを備えた構成にしてある。
(もっと読む)
ハイブリッド式建設機械の制御システム及び方法
【課題】ハイブリッド式建設機械の制御システム及び方法を提供する。
【解決手段】エンジン10の作業モードを検出するモード検出手段60と、油圧アクチュエータ15の駆動に必要な油圧ポンプ13の出力トルクを検出するトルク検出手段70と、エンジン10の作業モード毎に設定されたエンジントルクの下限及び上限の基準を貯蔵しているメモリ40と、モード検出手段60により検出された作業モードに応じて設定された下限及び上限の基準とトルク検出手段70により検出された油圧ポンプ13の出力トルクを比較し、油圧ポンプ13の出力トルクが下限の基準に達しない場合は、未到達分だけエンジン10の負荷になるようにモータ‐発電機17の発電を制御し、且つ、油圧ポンプ13の出力トルクが上限の基準を超える場合には、超過分だけエンジン10の出力を補助するようにモータ‐発電機17のモータ作動を制御するハイブリッド制御手段50を含む。
(もっと読む)
作業機械の旋回油圧制御装置
【課題】作業機械の旋回油圧制御装置に関し、簡素な構成で、旋回加速時のリリーフロスを削減する。
【解決手段】作業機械の旋回時における油圧ポンプ2aの出力を制御する。
まず、旋回動作に係る旋回操作量PHを旋回操作量検出手段11で検出し、該旋回操作量PHの単位時間当たりの増加量を立ち上がり制限手段13で制限し、これを制限旋回操作量Fとする。さらに、ポンプ出力制御手段12を用いて油圧ポンプ2aの出力を該制限旋回操作量Fに応じた大きさに制御する。
(もっと読む)
141 - 160 / 568
[ Back to top ]