
Fターム[2D003FA02]の内容
Fターム[2D003FA02]に分類される特許
161 - 180 / 568
建設機械
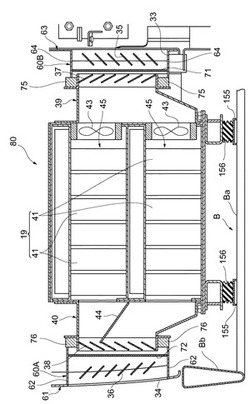
【課題】外部からの異物の侵入を防止すると共に蓄電手段を好適に空冷する。
【解決手段】ハウス部の開口部60A及び開口部60Bに金網72,71がそれぞれ設けられることによって、ハウス部の開口部60A,60Bからキャパシタボックス80内への異物の侵入を防止することができる。また、開口部60Aと吸気ダクト40との間を接続する接続部にインシュレーション76が設けられると共に、開口部60Bと排気ダクト39との間を接続する接続部にインシュレーション75が設けられることにより、ハウス部内に収容されるエンジン等の他の装置で発生する熱が、接続部を通してキャパシタボックス80内のキャパシタ19に伝わることを防止しキャパシタ19の温度上昇を抑制しつつ、ファン43によりケーシング内に形成された冷却風流路によってキャパシタ19を好適に空冷することができる。
(もっと読む)
作業機械の旋回油圧制御装置

【課題】作業機械の旋回油圧制御装置に関し、簡素な構成で、旋回加速時のリリーフロスを削減する。
【解決手段】作業機械の旋回時における油圧ポンプ2aの出力を制御する。
まず、旋回動作に係る旋回操作量PHを旋回操作量検出手段11で検出し、該旋回操作量PHの単位時間当たりの増加量を立ち上がり制限手段13で制限し、これを制限旋回操作量Fとする。さらに、ポンプ出力制御手段12を用いて油圧ポンプ2aの出力を該制限旋回操作量Fに応じた大きさに制御する。
(もっと読む)
建設機械
【課題】旋回体の旋回時に旋回方向に衝撃が作用しても、セルを収容するサブモジュールが潰れること無くセルを十分に保護できる建設機械を提供する。
【解決手段】一方向に複数並設すると共に外枠内に配置して当該外枠に固定したサブモジュールのその側壁のうちで、一列に並ばずに隣り合い対面する側壁同士を、旋回体4bの旋回方向Dを向くように配置することによって、旋回体4bの旋回時に旋回方向Dに生じる衝撃を、一方向に並設した複数の側壁に座屈荷重として分散して受けるようにし、剛性を高めた結果、サブモジュールに収容したセルを十分に保護する。
(もっと読む)
ハイブリッド建設機械
【課題】 装置の小型化と、安全性を高める。
【解決手段】 上記通路45,46に設けるとともにパイロット圧に応じて開度を制御する圧力制御弁FVと、コントローラCの電気信号に応じて切り換わって、上記圧力制御弁FVの上流側の圧力をパイロット圧としてこの圧力制御弁FVのパイロット室49に導く電磁パイロット制御弁PVとを備えている。そして、上記圧力制御弁FVは、流入ポート54と流出ポート55とを設けたバルブ本体53に、一端をパイロット室49に臨ませ、他端をスプリング室58に臨ませたメインスプールMSを摺動自在に組み込むとともに、上記パイロット室49に臨ませたスプール端の受圧面積PA、流出ポート側の一方のランド部側の受圧面積A1、他方のランド部側の受圧面積A2としたとき、PA=A1−A2の関係を保っている。
(もっと読む)
ハイブリッド建設機械の制御装置
【課題】回生エネルギーを効率よく利用できるようにする。
【解決手段】コントローラCは、中立位置検出手段から中立信号が入力したとき、第1電磁制御弁15を制御してパイロット油圧源PPとメイン切換弁14,29のパイロット室とを接続してメイン切換弁14,29を図面左側位置である第2位置に切り換え、メイン切換弁14,29を介して第1,2可変容量型ポンプMP1,MP2と発電用油圧モータMとを接続する。また、電磁切換弁11,27を回生エネルギー制御位置に保持して、電磁可変減圧弁13をレギュレータ12,28に接続し、電磁可変減圧弁13を制御してレギュレータに作用させる圧力を制御する。一方、アシストポンプAPを駆動させるための駆動信号が入力したとき、第2電磁制御弁16を制御して上記メイン切換弁14,29を第3位置に切り換える。
(もっと読む)
ハイブリッド建設機械の制御装置
【課題】アクチュエータが非作動状態にあるとき、エンジンの駆動力を活用して発電用油圧モータで発電できるようにして、エネルギーロスを抑える。
【解決手段】 レギュレータ1は、発電用油圧モータMの負荷圧と上記メインポンプMPの吐出圧との差圧を一定に保つ機能を有し、かつ、コントローラCは、操作状況検出手段で検出された信号に基づいて、アクチュエータが作動状態にあるか否かを判定する。そして、アクチュエータが非作動状態にあれば、電磁制御弁のソレノイドを励磁する。また、ソレノイドが励磁された電磁パイロット制御弁PVから導かれたパイロット圧に応じて流量制御弁FVが切り換わってメインポンプMPの吐出油を発電用油圧モータに供給するとともに、レギュレータは、メインポンプMと発電用油圧ポンプとの差圧を一定に保つ構成にしている。
(もっと読む)
ハイブリッド建設機械の制御装置
【課題】回生エネルギーを効率よく利用できるようにする。
【解決手段】コントローラCは、中立位置検出手段から中立信号が入力したとき、電磁制御弁14を制御してパイロット圧力源PPとメイン切換弁15,26のパイロット室15a,26aとを接続し、このメイン切換弁15,26を介して第1,2可変容量型ポンプMP1,MP2と発電用油圧モータMとを接続する。そして、電磁切換弁11,24を回生エネルギー制御位置に保持して、電磁可変減圧弁13をレギュレータ12,25に接続し、電磁可変減圧弁13を制御してレギュレータ12,25に作用させる圧力を制御する構成にしている。
(もっと読む)
ハイブリッド型作業機械及びその効率係数の算出方法
【課題】 所望のパワーを、動力源及び電力源に効率的に配分するために、動力から電力への変換、及び電力から動力への変換時の効率を精度よく算出することが望まれる。
【解決手段】 アシストモータが、発電運転とアシスト運転とを、選択的に行う。エンジンのトルク、アシストモータのトルク、及び外部負荷に印加されるトルクの相互授受を、トルク伝達機が行う。蓄電回路が、アシストモータで発電された電力により充電され、蓄積された電力を放電することによりアシストモータに電力を供給する。制御装置が、アシストモータをアシスト運転させ、アシストモータがアシスト運転されているときに蓄電回路の充放電電力、アシストモータの駆動電流、及び回転数を測定する。測定された充放電電力、駆動電流、及び回転数に基づいて、アシスト運転時におけるアシストモータの送受信電力、駆動電流、及び回転数の関係を示す効率係数を算出する。
(もっと読む)
ハイブリッド型作業機械
【課題】 エンジンが速度制御されている場合、高負荷または過負荷状態になると、トルクリミット制御が働き、適切な速度制御を行うことが困難になる。
【解決手段】 エンジンがトルクを発生する。電動発電機が、発電動作とアシスト動作とを、選択的に行う。外部負荷が、エンジンの負荷となる。トルク伝達機が、エンジンのトルク、電動発電機のトルク、及び外部負荷に印加されるトルクの相互授受を行う。速度センサが、エンジンの回転速度を測定する。制御装置が、エンジン及び電動発電機を制御する。制御装置は、エンジンの速度制御の目標値となる速度指令値を記憶し、外部負荷に要求される動力に基づいて、電動発電機に発生させるトルクを算出して電動発電機をトルク制御し、速度センサで測定された回転速度と速度指令値との差分に基づいて、電動発電機を速度制御する。電動発電機をトルク制御する制御状態と、速度制御する制御状態とを切り替えることができる。
(もっと読む)
積込運搬作業現場の車両操作装置
【課題】 積込運搬作業現場における無駄な労力を大幅に低減させることができ、効率的な作業を実現化することのできる車両操作装置を提供しようとする。
【解決手段】 積み込み作業の行える1以上の無線操縦式作業機械4と、積み込み部を備えた複数の無線操縦式運搬車両5,6とに、それぞれ操作指令信号を送信する無線式通信手段3と、それぞれが切り換え機構10,20を備え、その切り換えにより、無線操縦が可能となっている作業機械4及び運搬車両5,6のうちのいずれかの操作指令信号を選択して出力することが可能な複数の操作手段1,2と、複数の操作手段1,2のうち一の操作手段が選択した操作指令信号出力については、他の操作手段がその操作指令信号出力に切り換えても、その切り換えを遮断させる制御を行う制御装置3と、を備えた。
(もっと読む)
旋回駆動制御装置及びこれを含む建設機械
【課題】傾斜地においても安定的に旋回動作を行うことができる旋回駆動制御装置及びこれを含む建設機械を提供すること。
【解決手段】建設機械の上部旋回体3は旋回用電動機21によって旋回駆動される。旋回駆動制御装置40は、旋回用電動機21を駆動するためのトルク電流指令を生成する駆動指令生成部50と、トルク電流指令を補正するための補正用トルク電流指令を生成する駆動指令補正部60を含む。駆動指令補正部60は、旋回操作方向とは逆方向への上部旋回体3の旋回度合に応じて補正用トルク電流指令値を生成する。これにより、傾斜地で上部旋回体3を旋回駆動するときに、旋回操作方向とは逆方向への旋回を減じることができる。また、旋回駆動制御装置40は、旋回機構2を斜面下方向に回転させようとする重力成分が作用している場合に駆動指令補正部60による補正を中止する。
(もっと読む)
エンジンオイルレベル管理システム
【課題】作業機械から管理部さらにはユーザに対して誤ったオイルレベル不具合情報を誤送信するおそれを防止できるエンジンオイルレベル管理システムを提供する。
【解決手段】作業機械11に機体の傾斜角度を検出する傾斜角度センサ21を設置し、エンジンのオイルパンにエンジンオイルレベルを検出するオイルレベルスイッチ22を設ける。傾斜角度センサ21およびオイルレベルスイッチ22は、機体を制御するための機体コントローラ23に接続し、機体コントローラ23にモニタ24と動態管理用コントローラ25を接続する。機体コントローラ23は、傾斜角度センサ21で検出された傾斜角度が許容範囲内の場合であってオイルレベルスイッチ22で検出されたオイルレベルが不適正の判定のときはオイルレベル警告信号を発信する。動態管理用コントローラ25は、機体コントローラ23からのオイルレベル警告信号を受信したときのみオイルレベル不具合情報を管理部15に発信する。
(もっと読む)
建設機械の油圧制御装置
【課題】コスト及び機器の占有スペースを抑え簡便な構成を維持しつつ、使用する電力量を抑えバッテリの長寿命化を実現可能な建設機械の油圧制御装置を提供する。
【解決手段】走行モータ7L,7R、ブームシリンダ15a、アームシリンダ16a、バケットシリンダ17a、スイングシリンダ18aを備え、これらの油圧アクチュエータにより駆動される建設機械において、油圧アクチュエータを作動させるための作動油を吐出する可変容量型の油圧ポンプP1,P2と、油圧ポンプP1,P2の最大容量を変更する容量シリンダ37と、油圧ポンプP1,P2を駆動する電動モータMと、電動モータMを駆動させる電力を供給するバッテリ60と、バッテリ60のバッテリ残量を検出し、バッテリ残量の減少に合わせて、容量シリンダ37を作動させ油圧ポンプP1,P2の最大容量を減少させる制御を行うコントローラ50とを備える。
(もっと読む)
建設機械の油圧制御装置
【課題】コストを抑えつつ省エネルギー化を図るため電動モータの駆動量を低減させ、無駄なエネルギー消費を抑えることを可能にする建設機械の油圧制御装置を提供する。
【解決手段】油圧作動式のメインアクチュエータと、より使用頻度が低いサブアクチュエータとを備え、作動油をメインアクチュエータへ供給するメインポンプP1,P2及びサブアクチュエータへ供給するサブポンプP3,P4と、アクチュエータ操作手段と、アクチュエータ操作手段の操作量に応じてパイロット圧を出力するリモコンバルブ群75及びパイロット弁72と、パイロット圧により駆動され、各油圧アクチュエータへ供給される作動油の流量制御を行うメイン制御弁群50及びサブ制御弁群60と、メインポンプP1,P2を駆動する第1電動モータM1と、サブポンプP3,P4を駆動する第2電動モータM2とを備える。
(もっと読む)
建設機械のディスプレイ装置
【課題】建設機械のディスプレイ装置に関し、簡素な構成で、GPSをはじめとする自動測位装置が使用できない環境下においても正確な測位を実施し、作業性をさらに向上させる。
【解決手段】建設機械の初期位置を手動で入力するための初期位置入力手段1と、該建設機械の該初期位置からの相対変位を算出する相対変位算出手段2と、該初期位置及び該相対変位に基づいて推定位置を算出する推定位置算出手段5と、を備える。
また、該建設機械の姿勢を算出する姿勢算出手段3と、該建設機械のキャブ内に搭乗するオペレータの目視位置を算出する視点算出手段4と、を備える。
さらに、該推定位置,該姿勢及び該目視位置に基づいて施工計画図のキャブガラス上への投影図データを演算する投影図演算手段6と、投影図演算手段で演算された該投影図データを該キャブガラス上に表示する表示手段29とを備える。
(もっと読む)
産業車両の変速制御装置
【課題】作業効率の低下を防止できる産業車両の変速制御装置を提供する。
【解決手段】バケット112の高さが第1設定高さを超えると、変速許可速度を上昇させて、シフトアップが起こり難くなるように構成した。これにより、たとえば、Vシェープローディングにおいてアクセルペダル11を大きく踏み込まない状態であっても、変速許可速度の低下によるオペレータの意図に反するシフトアップ、およびこのシフトアップに起因するホイールローダ100の増速を抑制できる。したがって、ダンプトラックへの積み込みに必要な高さまでバケット112が上昇する前にホイールローダ100がダンプトラックに到達してしまう、という不具合を防止して、作業効率の低下を防止できる。
(もっと読む)
電気式操作レバーが備えられた建設機械
【課題】電気式操作レバー又は制御部に故障が発生したとき、ブームなどの作業装置の誤作動を防止する。
【解決手段】エンジン1、油圧ポンプ2及びパイロットポンプ3、油圧アクチュエータ4を含む建設機械において、操作量に比例して操作信号を出力する電気式操作レバー7と、操作信号にエラーが発生したとき、電気式操作レバー7より優先的に制御が行われるように操作信号を出力する操作ロックレバー10と、電気式操作レバー7の操作信号に比例して入力される信号圧力により切り換えられる電子式流量制御弁5と、制御信号を演算して出力する演算部15と、制御信号に対応する電流値が電子式流量制御弁5に印加されるように電流を制御する電流駆動部16を備える制御部6と、電気式操作レバー7又は制御部6に故障が発生した状態で操作ロックレバー10を操作すると電流駆動部16から電子式流量制御弁5に印加される電流を遮断する電源制御部とを、含む。
(もっと読む)
建設機械の油圧駆動装置
【課題】圧力損失を低減できると共に、車体のジャッキアップ力などの大きな押し付け力を発生させることができる建設機械の油圧駆動装置を提供する。
【解決手段】油圧ポンプと、該油圧ポンプから吐出される圧油が供給される複数の油圧アクチュエータと、油圧ポンプから複数の油圧アクチュエータに供給される圧油の方向及び流量を制御する方向切換弁を備えたコントロールバルブグループとを有する建設機械の油圧駆動装置において、ブームシリンダのボトム側油室の圧油をロッド側油室へ導く再生流量制御弁手段と、ブーム下げ操作時に、油圧ポンプから前記ブームシリンダのロッド側油室への圧油流量を制御するメータイン回路を設けたブーム用方向切換弁と、ブームシリンダのボトム側油室の圧力を検出する圧力検出手段と、ブーム用方向切換弁と前記再生流量制御弁手段とを制御する制御装置とを備えた。
(もっと読む)
作業支援装置
【課題】作業機と作業対象との間の詳細な位置関係を、容易且つ明瞭に把握できるようにする。
【解決手段】把持装置11から作業対象80までの距離を検知する距離センサ21と、運転者の触覚に作用して、運転者に距離の情報を伝える距離伝達手段3と、距離伝達手段3を制御する第1制御部41と、を備える。距離伝達手段3は、把持装置11を動作させるための操作レバー12に設けられており、且つ、運転者に接触して、当該運転者の触覚に作用するように動作する円板(接触部)31を有する。第1制御部41は、円板31による触覚への作用を、距離センサ21で検知された距離の長さに関連させて変化させる。
(もっと読む)
水中走行車両およびその制御方法
【課題】本体からの走行部の突出を抑制しつつ、平衡走行をも確保できる水中走行車両および水中走行車両の制御方法を提供する。
【解決手段】水中走行車両1は、本体10と、その前後に設けられたフリッパ式クローラ30(走行部)と、前後のクローラ30を揺動させる移動手段と、移動手段を制御する演算手段を備え、演算手段は、車両に働くモーメント、すなわち、重量に起因するモーメントと、浮力に起因するモーメントと、前後方向の移動に伴う流体抵抗に起因するモーメントと、推進力に起因するモーメントと、接地面から受ける垂直抗力によって生じるモーメントに基づき、車両が平衡状態にあるか否かを判断し、平衡状態と判断した時には前後のクローラ30を格納位置に維持し、車両1が前方へ倒れる恐れが高いと判断した時には、前側のクローラを前方に半転させ、車両1が後方へ倒れる恐れが高いと判断した時には、後側のクローラ30を後方に半転させる。
(もっと読む)
161 - 180 / 568
[ Back to top ]