
Fターム[2F051AB07]の内容
特定の目的に適した力の測定 (5,882) | 力の検出手段 (2,017) | 電気的 (1,162) | 感圧導電体 (148)
Fターム[2F051AB07]に分類される特許
1 - 20 / 148
検出装置、電子機器及びロボット
【課題】外力を高い精度で検出する検出装置を提供する事。
【解決手段】外力を検出する検出装置1は、基準点Pの周りに圧力センサー12を複数個配置した第一基板10と、突起22を有する第二基板20と、を備える。第一基板10は可撓性を有する。突起は22、基準点Pと重なる位置に重心Gが位置し、先端部が圧力センサー12に当接する様に配置されている。第一基板10が外力に応じて変形するので、外力の大きさと方向とを高い精度で検出する検出装置1を提供する事ができる。
(もっと読む)
圧力センサ、情報処理装置、及び電極決定方法

【課題】歩行補助装置の装着者の足のサイズの個人差に依存せず、足裏の着床と離床の状態を明確に感知することが可能な圧力センサ、情報処理装置、及び電極決定方法を提供する。
【解決手段】本発明は、第1の電極と複数の第2の電極が設けられた電極シートと、圧力により面抵抗が変化する感圧シートと、を備え、前記感圧シートの一方の面と、前記電極シートの一方の面とが重なり合って構成され、人の足裏と地面との間に装着される圧力センサである。そして、この圧力センサにおいて、前記第1の電極と複数の第2の電極は、それぞれ前記電極シートの前記面上の互いに異なる位置に設けられ、且つ、前記感圧シートの前記面であって前記第1の電極と前記第2の電極との間に位置する前記面を含む領域の抵抗に応じた電圧を前記第2の電極ごとに測定する情報処理装置へ電気的に接続するための導線がそれぞれの前記電極から引き出されている。
(もっと読む)
力検出器、検出装置、電子機器及びロボット
【課題】計測分解能が高く、計測感度が良い力検出器を提供する事。
【解決手段】検出面に加えられた力を検出する力検出器は、第一電極配線211と、第二電極配線212と、複数個の圧力センサー12とを備える。圧力センサー12は第一電極配線211と第二電極配線212との交点に設けられ、第二電極配線212は第一電極配線211よりも検出面側に配置される。第二電極配線212は圧力センサー12の外の領域で、屈曲又は湾曲する箇所を有している。こうする事で、一つの圧力センサー12に加えられた力が第二電極配線212を経由して隣の圧力センサー12に伝播する事を抑制でき、検出面に加えられた力を正確に測定する事ができる。
(もっと読む)
検出装置、電子機器及びロボット
【課題】物体に作用する外力の方向及び大きさという力覚情報、及び外力が作用した物体の静止または滑りという滑り覚情報の複合情報を検出可能な検出装置を提供する。
【解決手段】検出装置100は検出部K及び演算部Eを有し、検出部Kでは外力が作用する側から順に、弾性基板Aと、感圧導電シート及び感圧導電シートの抵抗値を検出する一対の電極を有する滑り検出部Bと、剛性基板Cと、基準点の回りに複数配置された圧力センサーを有する第1基板及び外力によって先端部が第1基板に当接した状態で弾性変形する弾性体突起が形成された第2基板を有する外力検出部Dとが積層されている。検出装置100は、滑り検出部Bで物体の静止または滑りという滑り覚情報と、外力検出部Dで作用した外力の方向及び大きさという力覚情報とを同時に検出することができる。
(もっと読む)
検出装置、電子機器およびロボット
【課題】力の方向と大きさとを高い精度で検出することが可能な検出装置、電子機器およびロボットを提供する。
【解決手段】力の方向と大きさとを検出する複数の検出領域を有する第1基板と、基準点と重なる位置に重心が位置するとともに、力によって頂部が検出領域に当接した状態で弾性変形する弾性体突起が配置された第2基板とを備え、検出領域と、その隣り合う検出領域との間に検出領域が配置された第1基板面を基部として突き出す突起体を備える。
(もっと読む)
触覚センサ用ゴム及び触覚センサ
【課題】感度が高い触覚センサ用ゴム及び触覚センサを提供する。
【解決手段】触覚センサ用ゴム1は、磁性流体とNiとを含有する磁気混合流体と、風船用の天然ゴム材料との混合物1aを磁場の存在下で硬化させることによって得られる。好ましくは、表面に凹凸10が形成されている。好ましくは、前記磁気混合流体はCuを含有する。好ましくは、樹脂体8によって被覆されている。触覚センサAは、上記の触覚センサ用ゴム1によって構成されるゴムセンサ部2と、このゴムセンサ部2に接する一対の電極3,3とを備え、前記一対の電極3,3の間に電圧を印加し、前記ゴムセンサ部2の表面に対して物体Bを接触させた際の電極3,3間に流れる電流変化により、前記物体Bを検出する。物体Bについて、接触、接触力、表面粗さ、柔らかさなどを検出することができる。
(もっと読む)
検出装置、電子機器、及びロボット
【課題】外力の有無を高速に検出し、且つ、外力の方向と大きさとを高い精度で検出する事が可能な検出装置、電子機器、及びロボットを提供する。
【解決手段】外力の有無を検出する第一機構31と、外力の大きさと方向とを検出する第二機構32と、を備え、第二機構32が形成される部位は窪んでいる。
(もっと読む)
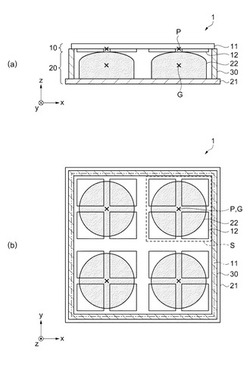
検出装置、電子機器及びロボット
【課題】外圧の方向と大きさを高い精度で検出することが可能な検出装置、電子機器及び
ロボットを提供する。
【解決手段】基準点Pの周りに複数配置された圧力センサー12を有する第1基板10と、基準点Pと重なる位置に重心が位置するとともに外圧によって先端部が第1基板10に当接した状態で弾性変形する円錐台もしくは角錐台形状である弾性体突起22が形成された第2基板20とを備える。
(もっと読む)
回転検出装置、検出装置、電子機器及びロボット
【課題】回転力の方向と大きさを高感度で検出する事が可能な回転検出装置、電子機器及びロボットを提供する。
【解決手段】回転軸4に対する外力の回転方向と大きさとを検出する回転検出装置100であって、第一基板11には基準点Pの回りに圧力センサー2が複数個設けられ、第二基板12には基準点Pと重なる位置、先端部が第一基板11に当接した状態で外力Fによって弾性変形する弾性体突起3が設けられている。第一基板11は回転軸4に対して固定されており、第二基板12は回転軸4に対して回転可能である。第二基板12に回転力が付加されると、弾性体突起3は圧縮変形し、複数の圧力センサー2で異なる値の圧力値が検出される。これらの圧力値に基づいて、高い精度で回転力の方向と大きさとを検出する。
(もっと読む)
荷重測定システム
【課題】小形・軽量化が容易な簡潔・薄型構造で設計の自由度及び高温環境下での安定性を有し、三軸荷重又は分布荷重の測定が可能な荷重センサを有する荷重測定システムを提供する。
【解決手段】本発明の荷重測定システムは、測定対象物との接触部に作用する荷重を測定するため、電極が形成された一対の基板と、一対の基板の電極間に挟持され、電圧を印加した状態で荷重Pを負荷することにより電気抵抗値が変化する特性及び1000℃オーダーの高温環境下で耐熱性を兼ね備えた導電性材料(GCを含む材料)とを備える荷重センサを有する。前記基板は、導電性部材により電極を兼ねて一体的に形成された構成に置き換えることもできる。
(もっと読む)
圧力センサ
【課題】感圧導電シートの導電性粒子の添加量を増加させることなく感度の良い圧力センサ1を提供する。
【解決手段】絶縁性基材2と、絶縁性基材2の一方主面に設けられた有機トランジスタ10と、有機トランジスタ10のソース電極12に所定電圧を印加する電圧電源30と、電圧電源30とソース電極12との間に設けられ、ソース電極12と直列に接続された感圧導電体20と、感圧導電体の一方主面側に積層された押圧シート60とを備え、感圧導電体20と押圧シート60とは少なくとも一部(凹部62)を非接触とし、他の部分(凸部61)を接触させた圧力センサ1を提供する。
(もっと読む)
物体表面の質感計測装置およびそれを用いた紙葉類識別装置
【課題】実用的な感度および速度で、物体表面の質感を計測することが可能な質感計測装置を提供する。
【解決手段】紙葉類識別装置10は、触覚センサ200と、触覚センサ200および質感計測部30を有する質感計測装置とを備える。質感計測部30は、紙幣70が搬送路60を移動するのに伴って、触覚センサ200からの抵抗値を計測し、データ処理部36は、たとえば、計測データの時間変化を高速フーリエ変換して周波数成分を抽出する。
(もっと読む)
咬合圧測定器、咬合圧測定システム
【課題】より簡易にかつ精度よく咬合圧測定結果と歯列との位置関係を把握することが可能な咬合圧測定器を提供する。
【解決手段】咬合圧を測定可能なセンサ部10と、該センサ部からの情報を伝達する本体20とを備え、センサ部は、複数の層を有する積層体であり、複数の層のうち少なくとも一層は咬合圧を検知可能な感圧層であり、センサ部の最外層は咬合圧により変形し、咬合圧が除圧されても変形を保持することが可能な形状転写層である、咬合圧測定器1である。
(もっと読む)
感圧式指紋センサー用フィルム積層体及びこのフィルム積層体を用いた感圧式指紋センサー
【課題】指紋による凹凸の程度に応じた正確な圧力分布を得ることができ、それによって指紋の形状を明確に認識することを可能とする感圧式指紋センサー用フィルム積層体を提供すること。
【解決手段】第1及び第2の表面を有し且つ第1の表面上に乾式の成膜プロセスにより形成された導電層を備えるベースフィルムと、ベースフィルムの第1の表面に対して反対側の第2の表面上に設けられた弾性層とを備え、ベースフィルムは、厚さが6μm以下であり、弾性層は、厚さがベースフィルム以上であり、弾性体であり且つ108Pa以下の弾性率を有している感圧式指紋センサー用フィルム積層体。
(もっと読む)
触覚センサ
【課題】構造が簡単で、入力された荷重を剪断力と圧縮力とに分解して、さらには剪断力を二方向に分解して検出可能な触覚センサを提供することを課題とする。
【解決手段】触覚センサ1は、接触対象物90から荷重F1が入力される入力面50aを有し、荷重F1を剪断力と圧縮力とに分解して検出する。触覚センサ1は、X方向の変形に異方性を有するX方向用誘電層2と、Y方向の変形に異方性を有するY方向用誘電層3と、Z方向の変形に異方性を有する、または変形に等方性を有するZ方向用誘電層4と、を備える。触覚センサ1は、荷重F1が入力される際の変形に伴う各誘電層2、3、4の静電容量の変化を基に、剪断力、圧縮力を検出する。
(もっと読む)
ニップ圧測定装置、ニップ圧測定方法及びニップ圧測定プログラム
【課題】搬送部材の搬送方向に関するニップ圧を従来のニップ圧測定装置に比べて狭い測定間隔で測定できるニップ圧測定装置を提供する。
【解決手段】感圧センサ2と、駆動回路3と、制御装置(PC)4とを備えたニップ圧測定装置1であって、制御装置4は、駆動回路3を制御して感圧センサ2に備えられた複数の圧力検出点19に印加された圧力を順次検知するための走査動作を所定時間ごとに複数回行わせる走査制御手段と、1回の走査動作によって得られた複数の圧力検出点19に印加された圧力を示す一次元圧力分布データ20を、複数回の走査動作について順次記憶する第1記憶手段と、一次元圧力分布データ20を走査動作順に結合し、二次元圧力分布データ21を作成する合成手段と、二次元圧力分布データ21を記憶する第2記憶手段とを有している構成とする。
(もっと読む)
着座荷重検出装置
【課題】着座荷重検出装置が曲げられて車両用シートクッションに配置される場合でも、乗員の着座状態を正しく検出する着座荷重検出装置を提供する。
【解決手段】複数の感圧スイッチ20を構成する複数の被接離部が所定間隔を空けて形成されるとともに該被接離部間を接続するスイッチ配線が形成された第1フィルムと、第1フィルムと対向配置され、前記感圧スイッチ20を構成し被接離部を夫々接離する複数の接離部が形成された第2フィルムと、第1及び第2フィルムの間に配置され、複数の感圧スイッチに対向する位置に夫々貫通穴30が形成されるとともに、各貫通穴30に連通して大気に連通する空気通路32が形成された離隔部材と、着座荷重検出装置が着座面に湾曲して取り付けられる湾曲部と該湾曲部に対して最も近くに位置する感圧スイッチ20との間に、第1及び第2フィルム間に生じる歪を吸収する逃げ穴34を離隔部材に設ける。
(もっと読む)
圧力検出装置
【課題】導電性繊維を用いた安価な圧力検出装置を提供する。
【解決手段】外部圧力によって弾性変形可能な導電性繊維15からなる不織布10と、前記不織布10を挟み込む一対の電極11,12と、を備えている。この構成によれば、不織布10自体が弾性復元力を備えているので、不織布10に対して特殊な加工を施さなくても十分な復元力が得られる。よって、不織布10を一対の電極11,12で挟み込むだけの簡単な構成で加圧状態と非加圧状態の圧力変化を精度よく検出することができ、安価な圧力検出装置が提供される。
(もっと読む)
圧力センサおよび傾き検出装置
【課題】歩行補助装置の装着者の足裏にかかる荷重方向を感知することが可能な圧力センサを提供する。
【解決手段】本発明は、圧力により面抵抗が変化する感圧シートと、3つ以上の電極が設けられた電極シートとを備え、前記感圧シートの一方の面と、前記電極シートの一方の面とが重なり合って構成される圧力センサにおいて、前記3つ以上の電極は、前記電極シートの前記面上の互いに異なる位置に設けられ、且つ、前記感圧シートの前記面であって各前記電極間に位置する前記面を含む各領域が絶縁され、前記各領域の抵抗が測定可能に設けられている。
(もっと読む)
検出装置、電子機器及びロボット
【課題】外圧の方向と大きさを高い感度で且つ再現性良く検出することが可能な検出装置、電子機器及びロボットを提供する。
【解決手段】基準点Pの回りに複数配置された圧力センサー12、を有する第1基板10と、基準点Pと重なる位置に重心が位置するとともに外圧によって先端部が第1基板10に当接した状態で弾性変形する弾性体突起22、が形成された第2基板20と、を備え、弾性変形する弾性体突起22は、互いに張力で影響しあう弾性体で接合されている。
(もっと読む)
1 - 20 / 148
[ Back to top ]