
Fターム[2F063CA10]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 目的 (1,548) | 測定、検出範囲の拡大 (160)
Fターム[2F063CA10]に分類される特許
1 - 20 / 160
検出装置および光学装置
回転角検出装置、及びトルクセンサ
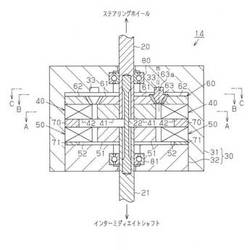
【課題】回転体の多回転の絶対回転角を検出することが可能でありながらも、構造の簡素化を図ることのできるトルクセンサを提供する。
【解決手段】このトルクセンサ14では、第1のレゾルバ40を通じて検出されるインプットシャフト20の回転角度と、第2のレゾルバ50を通じて検出されるロアシャフト21の回転角度との差分値に基づいてステアリングホイールに付与された操舵トルクを演算する。ここでは、インプットシャフト20と一体となって回転する太陽歯車61、磁性体により形成されて太陽歯車61の周囲を公転する遊星歯車63、及び遊星歯車63が噛合される内歯車62により構成される遊星歯車機構60を設ける。そして、第1のレゾルバ40から出力される電圧信号に基づいてインプットシャフト20の回転角及び遊星歯車63の位置を検出し、それらに基づいてステアリングホイールの操舵角を求める。
(もっと読む)
浸炭検知方法

【課題】従来の浸炭検知方法では検知困難な微細な浸炭をも検知可能な浸炭検知方法を提供する。
【解決手段】本発明は、管内面に浸炭の生じていることが既知である浸炭材P0を励磁コイル11及び検出コイル12に内挿させ、励磁コイルに通電する励磁電流の電流値をI(A)、励磁コイルの長さをL(mm)、励磁コイルの巻き数をN、励磁コイルに通電する励磁電流の周波数をF(kHz)とした場合に、検出コイルからの出力信号に基づき浸炭材に生じている浸炭を検知できるように、下記の式(1)で表されるパラメータKの値を決定した後、このパラメータKの値が得られるように励磁コイルの条件を設定した後、被検査対象である管内面における浸炭の有無を検知することを特徴とする。
K=(I・N/L)・F−3/2 ・・・(1)
(もっと読む)
シフト位置検出装置
【課題】車両用変速装置のシフト位置を、シフト位置に応じた接点を変えることによって検出する場合に、接点間の短絡故障を検知でき、シフト位置数の増加を容易にする。
【解決手段】シフト位置検出装置1は、シフト位置(P/R/N/D)に応じた接点SWに抵抗RとコンデンサCとを直列接続した回路を並列に接続する時定数設定部20を備え、各回路の時定数が異ならせてある。PNP型トランジスタTr1がONとなって接続点16から電圧Vccが時定数設定部20に印加されたとき、シフト位置判定部13が、観測点Bの電圧を取得して時定数を検出し、検出した時定数に対応するシフト位置を判定する。また、短絡検知部12は、電圧Vccが印加された際に、観測点Bにおける上流抵抗R1と時定数設定部20の合成抵抗との分圧比(または分圧電圧)を検出し、短絡していない正常時の分圧比(または分圧電圧)と比較することによって、短絡事故を検出する。
(もっと読む)
位置検出センサ、これを備えたクラッチアクチュエータ、およびこれを備えたクラッチ装置
【課題】被位置検出部材の直線移動が大きい場合にも磁界発生部材による位置検出をより正確に検出しつつ、コストを安くすることのできる位置検出センサを提供する。
【解決手段】位置検出センサ1の磁界発生部材3は、被位置検出部材2の直線移動方向の長さが所定長さで磁石により磁化される例えば鉄等の軟磁性体3aと、同じ大きさの一対の磁石3b,3cとを有する。一対の磁石3b,3cは、それぞれ、軟磁性体3aの両端に被位置検出部材2の直線移動方向に直線状に接合されている。すなわち、磁石3b,3c
と軟磁性体3aは被位置検出部材2の直線移動方向に交互に配設される。これにより、被位置検出部材2の直線移動方向の磁界発生部材3の長さLは、従来の磁界発生部材3の長さより長く設定される。
(もっと読む)
回転機械用物理量測定装置
【課題】センサの出力信号Sに含まれるパルスの時間間隔を、計測用カウンタ9のカウント値に基づいて計測し、この計測した時間間隔を利用して回転部材に作用する荷重等の物理量を求める構造に関して、この物理量を測定すべき回転速度範囲が広い場合でも、煩雑な処理を行う事なく、低速回転時に前記計測用カウンタ9のカウント値がオーバーフローする事を防止でき、高速回転時に前記時間間隔の分解能を十分に確保できる構造を実現する。
【解決手段】他の装置を利用して検出した前記回転部材の回転速度を入力するか、或いは、この回転速度を把握する為の調節用カウンタ10を設ける。更に、この回転速度が増減する事に対応して、前記計測用カウンタ9がカウントする計測用基準クロック信号βの周波数を、この回転速度の増減方向と同方向に増減させる機能を追加する。
(もっと読む)
アブソリュート変位量を算出する装置及びその方法
【課題】本発明は、移動体のアブソリュート変位量を検出することを課題とする。
【解決手段】変位量を検出する実施例では、主軸の多回転アブソリュート回転角を主軸及び副軸に結合された角度センサによって検出された回転角度から算出する。回転駆動源11に結合された主軸12の回転は予め定める変速比で副軸13,14に伝達される。主軸12及び副軸13,14の回転角度Ss,Sp,Sqは、角度センサ15a,15b,15cによって検出され、それらはAD変換角度計算部16で角度検出値θs,θp,θqとしてそれぞれ同期化/整数化処理部17に送られ、整数化された周期信号p,qが算出される。周期信号p,qは、周期演算部18にそれぞれ送られ、主軸の周期信号rが算出される。主軸の多回転アブソリュート回転角θcは、回転角合成部19で主軸の周期信号r及び主軸の角度検出値θsに基づいて、算出される。本発明は、直線移動する移動体の変位量を検出する装置にも適用することができる。
(もっと読む)
操舵絶対角検出装置および車両用操舵装置
【課題】検出が容易な操舵絶対角検出装置を提供する。
【解決手段】操舵軸の回転角区間(例えば1回転360°毎)にそれぞれ応じたラック軸8の軸方向区間を設けた。軸方向区間毎に仕様の異なる複数の被検出面(平坦面341〜344)を、ラック軸8の表面8bに設けた。距離検出器33が、何れの被検出面(平坦面341〜344)を検出するかによって、ラック軸8の軸方向区間(操舵軸の回転角区間に相当)を特定する。特定された回転角区間に対応する回転角基準値に、トルクセンサの第1レゾルバにより検出された回転角値を加算して、操舵絶対角を求める。
(もっと読む)
動的自動利得制御機能を有するセンサインタフェースの方法及びシステム
【課題】動的自動利得制御機能を有するセンサインタフェースの方法等を提供する。
【解決手段】所与のターゲットの速度範囲全体にわたって入力信号の真の正ピーク及び負ピークが維持されるように信号調整処理を動的に調節することにより、低速時の信号対ノイズ比を高め、高速時のクリッピングや歪みを防ぐことが可能な磁気センサインタフェースを提供する。センサから交流差動電圧信号を受信するステップを含む。交流差動電圧信号の振幅は、時間とともに変化する。交流差動電圧信号は、動的スケーリングが可能な減衰済みシングルエンデッド電圧信号に変換される。減衰済みシングルエンデッド電圧信号にスケーリング係数を乗じることにより、減衰済みシングルエンデッド電圧信号をスケーリングすることが可能である。スケーリング係数は、スケーリングされた減衰済みシングルエンデッド電圧信号の信号対ノイズ比を最大化するように選択される。
(もっと読む)
測位装置、測位方法、プログラム、及び記録媒体
【課題】外部装置と通信できない状況においても絶対位置を取得することができる測位装置、測位方法、プログラム、及び記録媒体を提供する。
【解決手段】測位装置100,200,300は、地磁気を検知する地磁気検知部101と、絶対位置と対応づけられた上記地磁気の全磁力及び伏角の値を含む地磁気情報を記憶する記憶部103と、上記地磁気検知部により検知された地磁気の全磁力及び伏角の値と、上記地磁気情報とを照合し、該当するエリアを抽出する抽出部105と、上記抽出部により抽出されたエリアから現在位置を特定する特定部107とを有する。
(もっと読む)
角度検出器及び電動パワーステアリング装置
【課題】 製造コストを低減可能な角度検出器等を提供する。
【解決手段】 角度検出器100は、第1の回転体12と、第2の回転体32と、前記第1の回転体及び前記第2の回転体を連結する連結部22と、前記第1の回転体と連動する第1の副回転機構13と、前記第1の副回転機構の回転状態を検出する第1の検出機構14と、前記第2の回転体と連動する第2の副回転機構33と、前記第2の副回転機構の回転状態を検出する第2の検出機構34と、前記第1の副回転機構の回転状態と前記第2の副回転機構の回転状態とに基づき前記連結部のねじれ状態を演算する第1の演算部42と、前記第1の回転体と連動する仮想の副回転機構15の回転状態と前記第1の副回転機構の回転状態とに基づき前記第1の回転体の回転角を演算する第2の演算部44とを備える。仮想の副回転機構15の回転状態は、連結部22のねじれ状態に基づく。
(もっと読む)
位置検出装置
【課題】広い検出範囲でありながら、高い測定精度をもち安価で小型の位置検出装置を提供する。
【解決手段】磁石3の長さより短い配置間隔で磁気検知器5を複数個並べ、検出範囲を複数の磁気検知器5で分割して測定する。これにより任意の検出範囲の位置検出装置が製作でき、検出範囲が長い場合でも磁石3が小型にでき、さらに位置検出装置の全長を短くできる。また、磁石3の着磁方向を移動方向に異極とし、移動方向に垂直な方向の磁力線を検出対象とすることで、磁力線の強さが磁石の全長方向に広い範囲でなだらかに変化するので、検出精度の高い位置検出装置が実現できる。さらに検出範囲を複数の磁気検知器5で分割して測定するので、位置測定の分解能を高くでき、高精度の測定が可能となる。
(もっと読む)
操作位置検出装置
【課題】互いに隣接する操作検出位置の中間領域でセンサの出力が不定となる領域をなくすことにより、簡素化した構成でセンサの異常を容易に認識し得る操作位置検出装置を提供することにある。
【解決手段】
シフトレバー(52)の操作位置を検出するシフトポジション検出装置(10)において、シフトレバーの操作に連動するマグネット(11)を検出するMRセンサ(21,22,23)を、マグネットの移動経路(20)の両側に沿って、シフトポジションに対応する操作検出位置に対応して交互に配列する。互いに隣接する2つの操作検出位置におけるMRセンサの感知エリア同士のオーバラップ領域をマグネットの移動経路が必ず横断することにより、移動経路に製造時等の際のばらつきがあっても操作検出位置の中間領域でMRセンサの出力が不定となる現象を生じさせない。
(もっと読む)
超音波探傷システムおよび超音波探傷方法
【課題】検査対象の所定範囲を効率よく網羅的に検査する。
【解決手段】検査対象Aの表面上において移動させられて検査対象A内部の超音波探傷を行う超音波探触子2と、該超音波探触子2の位置および姿勢を検出する位置姿勢検出装置3と、検査対象Aの表面上における超音波探触子2の移動経路Cを記憶する経路記憶部と、経路記憶部に記憶されている移動経路Cに対する超音波探触子2の位置および姿勢のズレ量の許容値を記憶する許容値記憶部と、位置姿勢検出装置3により検出された超音波探触子2の位置および姿勢の移動経路Cに対するズレ量が許容値記憶部に記憶されている許容値を超えた場合にその旨を報知する報知部6とを備える超音波探傷システム1を提供する。
(もっと読む)
センサ装置および情報表示装置
【課題】検出可能距離および検出感度を向上させることができるセンサ装置および情報表示装置を提供する。
【解決手段】上記センサ装置は、センサ部10と、演算部12と、切替回路部11と、制御部13とを具備する。センサ部10は、検出対象物の近接によって静電容量が変化する複数の検出電極を有する。演算部12は、検出対象物とセンサ部との間の距離である第1の距離を算出する。切替回路部11は、複数の検出電極を、上記静電容量の検出のための信号電圧が供給される第1の状態と電気的に浮遊した第2の状態との間で切り替える。切替回路部12は、複数の検出電極のうち第2の状態から第1の状態へ切り替えられる二以上の検出電極を一つずつ選択する。制御部13は、第2の状態から第1の状態へ切り替えられる検出電極相互間の距離である第2の距離が上記第1の距離に対応するように切替回路部11を制御する。
(もっと読む)
センサユニットおよびこれを用いた位置決め装置
【課題】安価かつコンパクトな構成で、ターゲット位置についてギャップセンサの側長域を超える大きな変位を測定できるセンサユニットおよびこれを用いた位置決め装置を提供する。
【解決手段】検出された物理量からターゲット110の位置を計測するセンサユニット100であって、可動方向aおよびこれに垂直な方向bに対して傾きを有する傾斜面116が形成されたターゲット110と、傾斜面116との距離に対応する物理量を検出するギャップセンサ120とを備える。これにより、ターゲット110の可動方向への変位に対して傾斜面116のギャップセンサ120に対する変位は小さくなるため、安価かつコンパクトな構成で、ターゲット位置についてギャップセンサ120の側長域を超える大きな変位を測定できる。
(もっと読む)
位置検出機構
【課題】本発明は、位置検出機構の検出可能な範囲を拡大するということを目的とするものである。
【解決手段】本発明の位置検出機構は、Y軸に垂直な方向の断面における磁化方向が断面位置に寄らず一定であり、X軸方向の対向する端面における磁力線の方向が互いに反対方向である磁石15と、磁石15とZ軸方向で間隔を空けて配置され、XY平面に平行な方向の磁界を感知することができるGMR素子13とを備え、磁石15は、GMR素子13に対して相対的にX軸方向およびY軸方向に移動可能であり、磁石15のX軸方向、Y軸方向およびZ軸方向の外形はY軸方向がもっとも長く、GMR素子13は、磁石15がY軸方向にΔY移動した際の磁石15からの磁束密度の変化ΔBが±5%以内となる位置に位置し、GMR素子13は、磁石15をZ軸方向に投影した領域の外部に位置している。
(もっと読む)
回転角度検出装置
【課題】自動車のステアリングの回転角度検出等に用いられる回転角度検出装置に関し、簡易な構成で、複数回転する回転体の回転角度が検出可能で安価な回転角度検出装置を提供することを目的とする。
【解決手段】検出体22の内周に雌ネジ部22Cを設けると共に基体30に雄ネジ部32Aを設けて、この雄ネジ部32Aに雌ネジ部22Cを螺合させ、回転体21の回転に連動して検出体22を回転させると共に回転軸方向の上下方向へ移動させ、磁石23Aと磁気検出素子23Bからなる検出手段からの検出体22の回転及び回転軸方向への移動に伴う検出信号S1、S2によって、制御手段29が回転体21の回転角度を検出するように回転角度検出装置を構成する。
(もっと読む)
回転角検出装置
【課題】部品点数の増大を抑制し、必要な精度を有する回転角検出装置を提供すること。
【解決手段】ハウジングに回転軸の回転に連動して軸方向に変位しつつ回転自在に支承される磁石ホルダと、磁石ホルダ端面に磁石ホルダ回転軸に対し径方向にオフセットして配置された磁石と、磁石ホルダ回転軸の軸心延長線上に磁石と対向して設置される磁気検出器と、磁気検出器の出力信号を処理して前記回転体の回転角を検出する回転角度演算部とを備える構成とすることで、磁石および磁気検出器がそれぞれひとつであっても、回転体の360度以下或いは360度超の回転角を検出することのできる簡単な構成で安価な回転角検出装置を提供する。
(もっと読む)
カーボンナノチューブを用いた伸縮装置とその製造方法
【課題】従来技術による、伸縮を検出できる伸縮装置は、金属・半導体等のいわば、十分に伸縮可能な部材を用いていなかったために、繰り返し検出できる伸縮は5%程度に限られており、このような従来技術の問題点に鑑み、本発明では、従来よりも格段に大きな伸縮を、繰り返し検出できる、伸縮装置を提供する。
【解決手段】本発明によると、伸縮可能な基材上に配置され、所定の方向に配向した複数のCNTを備える配向CNT膜構造体を備え、かつ該配向CNT膜構造体は、伸びにより裂け目を生じて亀裂帯を形成してなる伸縮装置が提供される。
(もっと読む)
1 - 20 / 160
[ Back to top ]