
Fターム[2F063DA05]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 測定方法 (3,108) | 測定内容を直接信号に変換して測定 (1,291)
Fターム[2F063DA05]に分類される特許
341 - 360 / 1,291
回転検出装置及び直流モータ
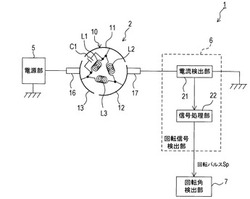
【課題】 エンコーダ等のセンサを設けることなく、またトルク変動を抑制しつつ、回転速度によらずにブラシ付き直流モータの回転状態を精度良く検出する。
【解決手段】 電源部5は、直流電圧に交流電圧が重畳された電圧をモータ2へ印加する。これによりモータ2の回転時には交流成分を含む電流が流れる。モータ2は、3相の各相コイルL1,L2,L3のうち第1相コイルL1と並列にコンデンサC1が接続されており、このコンデンサC1により、各ブラシ16,17間のモータ回路のインピーダンスはモータ2の回転に応じて変化し、その変化はモータ電流の交流成分の振幅変化として現れる。信号処理部22は、電流検出部21にて検出されたモータ電流から交流成分を抽出し、その振幅変化に応じた回転パルスを生成する。この回転パルスに基づき、回転角検出部7がモータ2の回転角を検出する。
(もっと読む)
操作位置判定装置

【課題】簡単な構成で、正確に所定の操作位置を判定することができる操作位置判定装置を提供する。
【解決手段】操作位置判定装置1は、磁石2と、第1のハーフブリッジ回路、及び第2のハーフブリッジ回路を有する第1のMRセンサ4と、第3のハーフブリッジ回路、及び第4のハーフブリッジ回路を有する第2のMRセンサ5と、判定部6と、を備え、判定部6は、磁石2によって発生する磁界に基づいて第1のハーフブリッジ回路と第3のハーフブリッジ回路から出力される出力信号の第1の差分値と、第2のハーフブリッジ回路と第4のハーフブリッジ回路から出力される出力信号の第2の差分値とを、所定の区間に分け、その区間の組合せに基づいて操作位置を判定する。
(もっと読む)
磁石を使用した移動検出装置
【課題】 磁石の移動位置を磁気検知器で検知する移動検出装置において、移動部と共に磁石が滑らかに移動でき、磁石と磁気検知器との位置関係を安定させることができるようにする。
【解決手段】 磁気検知器16の近傍に形成された案内面14を摺動する摺動ホルダ20が設けられ、この摺動ホルダ20に磁石30が保持されている。磁石30のX1側に向く対向面33は曲面であり、この対向面33が摺動ホルダ20に形成された開口部23からX1方向へ突出して、磁気検知器16との距離を短くしている。摺動ホルダ20と移動部12bとの間には板ばね40が設けられ、この板ばね40によって摺動ホルダ20が案内面14に押し付けられている。移動部12bが移動すると摺動ホルダ20が案内面14を摺動するため、磁石30と磁気検知器16との相対距離を常に最適に設定できる。
(もっと読む)
誘導式位置センサー、誘導式位置センサーを備えた測定システム及び位置センサーの動作方法
本発明は、受信導体(1.11,1.12,1.13;1.21,1.22,1.23)で検出した信号(S1.11,S1.12,S1.13;S1.21,S1.22,S1.23)から、先ずは三つのデジタル信号(S3.51,S3.52,S3.53;S3.61,S3.62,S3.63)を生成することが可能であるように構成された電子回路(3)を備えた誘導式位置センサーに関する。本発明では、これらの三つのデジタル信号(S3.51,S3.52,S3.53;S3.61,S3.62,S3.63)の組合せによって、少なくとも二つの位置の値(P,P3.71,P3.72;P3.81,P3.82,P3.83)を算出することが可能であり、これらの位置の値(P,P3.71,P3.72;P3.81,P3.82,P3.83)を比較器(3.20,4.1)に供給することが可能である。更に、本発明は、誘導式位置センサーの動作方法、並びに位置センサーに加えて、データインタフェース(5.20,4.20)と、比較器(4.1)を備えた後続の電子機器(4)とを有する測定システムに関する。 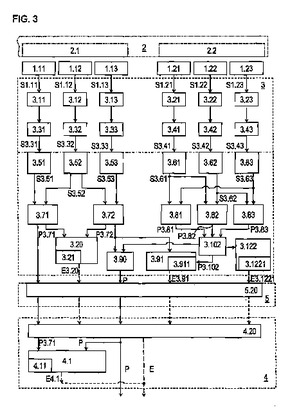 (もっと読む)
(もっと読む)
等速自在継手用作動角センサ
【課題】 等速自在継手側に励磁回路を設けることなく、少ない消費電力で動作中の等速自在継手の作動角を検出できる等速自在継手用作動角センサを提供する。
【解決手段】 内輪3と外輪2間の作動角の変化による磁気抵抗変化を、凹球面円環部13の内径側の空間に収められた半導体磁気センサ15の出力で検出することにより上記作動角を求める。
(もっと読む)
位置検出装置
【課題】本発明は、容易に小型化ができる位置検出装置を提供することを目的とするものである。
【解決手段】本発明の位置検出装置は、移動可能に配設されたレンズ1と、このレンズ1とともに移動するように設けられた磁気シート2と、前記レンズ1の位置を検出するように前記磁気シート2と対向する位置に固定された磁気抵抗効果素子3とを備え、前記磁気シート2を基材とこの基材の上面に着磁された磁性層とで構成したものである。
(もっと読む)
回転角検出装置
【課題】 部品点数の少ない簡単な構造であり、かつ高価な多回転方式のアブソリュート型の回転位置検出手段を必要とせずに、回転体の360°を超える回転角を精度良く検出できるようにする。
【解決手段】 ステアリングシャフト11に設けた駆動ギヤ12に噛合する従動ギヤ14が支軸13まわりに回転すると、ねじ機構16により、従動ギヤ14が軸線L方向に直線移動する。移動位置検出手段20が検出した従動ギヤ14の軸線L方向の位置と、回転位置検出手17段が検出した従動ギヤ14の回転位置とに基づいて、回転角算出手段23がステアリングシャフト11の回転角を算出するので、従動ギヤ14が1回転を超えて回転する場合であっても、移動位置検出手段20により従動ギヤ14の大まかな回転数を検出し、回転位置検出手段17で従動ギヤ14の精密な回転位置を検出することで、ステアリングシャフト11の絶対回転角を精度良く検出することができる。
(もっと読む)
受動渦電流センサ用高温エレクトロニクス
1または複数の対象物たとえばガス・タービンの回転ブレードの周期的接近を検知するためのシステムおよび方法。システムは、受動渦電流検知ユニットであって、第1および第2の磁界を生成および検出するために結合された第1および第2の磁石と第1および第2のコイル巻コアとを有する受動渦電流検知ユニットを備える。検知ユニットは対象物に対して、第1および第2のコイル巻コアが、第1および第2の磁界を周期的に通過する対象物に応答してそれぞれ出力を生成するように、位置する。回路構成が、第1および第2のコイル巻コアの出力を電子的に組み合わせて、対象物が第1および第2の磁界を周期的に通過するときの接近およびタイミングに対応する出力信号を生成する。第1および第2のコイル巻コアの出力中に存在する電磁妨害ノイズが、回路構成の出力信号から取り除かれる。 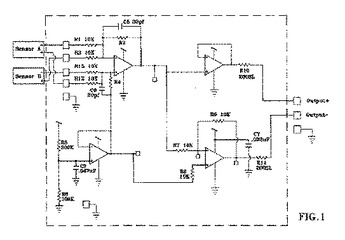 (もっと読む)
(もっと読む)
路盤内の蓄積ひずみの計測方法
【課題】路盤内に蓄積されたひずみを精度良く計測する。
【解決手段】計測箇所のアスファルトコンクリート層Bを除去して路盤Aを露出させた後、露出した路盤Aに所定の間隔をおいて1対の測定用ロッド1a,1bを打ち込み固定するとともに、路盤面から突き出た両測定用ロッド1a,1bの上部に変位計2の両端を固定し、変位計2による計測を開始した後、1対の測定用ロッド1a,1bを囲むようにして、アスファルトコンクリート層Bおよびその下層の路盤Aまたは露出した路盤Aを、カッターを用いて全層厚方向で切断し、計測箇所の路盤Aを切り離すことにより計測箇所の路盤Aに蓄積されたひずみを開放し、変位計2で測定された変位に基づき開放ひずみを求める。
(もっと読む)
対象物の周期的位置を検知するためのシステムおよび方法
1または複数の対象物たとえばタービンの回転ブレードの周期的位置を検知するためのシステムおよび方法。システムは受動渦電流検知ユニットを備え、受動渦電流検知ユニットは、1または複数の磁石と第1および第2のコイルがそれぞれ巻かれた第1および第2のコアとを有し、これらは共に第1および第2の磁界を発生させる。検知ユニットの位置は、対象物が第1および第2の磁界を周期的に連続して通過し、その結果、第1および第2のコイルが第1および第2の出力信号をそれぞれ生成するように定める。各コイルは別個に処理回路構成に接続され、処理回路構成は第1および第2の出力信号をそれぞれ受け取る。回路構成は、第1および第2の出力信号を電子的に組み合わせて、同相信号が電子的に互いに差し引き合い、回路構成の出力から、第1および第2の出力信号中に存在する任意の電磁妨害ノイズが取り除かれるようにする。 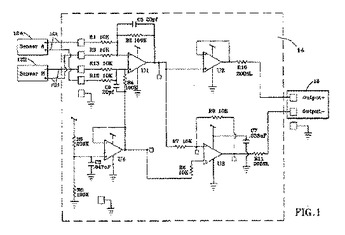 (もっと読む)
(もっと読む)
位置検出装置
【課題】検出対象の変位を検出する検出回路に発生した異常をその動作電源をオンした際に即時に検出することができる位置検出装置を提供すること。
【解決手段】電源がオンされると、マイクロコンピュータ23は、まず第1ラインL1(出力端子−Vo1)をグランドに接続し、次に第2ラインL2(出力端子+Vo1)をグランドに接続し、最後に第1ラインL1(出力端子−Vo1)及び第2ラインL2(出力端子+Vo1)をグランドに接続する。マイクロコンピュータ23は、これら3つの接続状態としたときに、第1差動増幅回路26から出力される信号の電圧レベルと正常時に前記3つの接続状態としたときの出力信号の電圧レベルとの比較を行い、正常時と異なった電圧レベルの信号が入力されたときには第1磁気センサ20若しくは第1差動増幅回路26に異常があると判断する。
(もっと読む)
ALCパネルの主筋かぶり厚検査方法
【課題】ALCパネルの製造工程において、内部に埋設される主筋から両面までの主筋かぶり厚を、高速かつ安価に、過検出とならないように測定する方法を提供する。
【解決手段】渦電流式磁気センサ(7)を使用し、該センサ(7)を、水平方向に搬送されるALCパネル(1)の腹面から一定距離(L)を保持し、かつ、一定速度(v1)で、ALCパネル(1)の搬送方向に対して垂直方向に往復動させ、センサ(7)の出力値をアナログ出力させ、センサ(7)が主筋(2)の上を通過する際の測定信号のピーク値(vm)と、前記速度(v1)と、センサ(7)と主筋(2)との距離の関係式f(ピーク値、速度)を予め求めておき、主筋のかぶり厚(t)を、t=f(vm、v1)−Lにより算出し、得られたデータをピークカット処理ないしは移動平均処理することにより、補強鉄筋徒の交差の影響を排除して、ALCパネルの主筋かぶり厚を測定する。
(もっと読む)
スライド操作装置
【課題】静電誘導型エンコーダを用いたスライド操作装置を提供することを目的とする。
【解決手段】スライド操作装置1は、一点鎖線で示されるケース体11に覆われており、パネル2の裏面に取り付けられる。移動体15は、ガイドシャフト13,14により案内支持されてスライド移動する。固定子基板12には、長手方向に延在する固定子電極(励振電極と電位検出電極)20が形成され、移動子基板19には、固定子電極20に静電結合される移動子電極(浮遊電極)21が形成されている。移動子電極21は、固定子電極20と静電誘導で結合する電極であるので、ケース体11からの配線を必要としない。
(もっと読む)
減速装置及びその遊星歯車固定方法
【課題】遊星歯車を備えた減速装置において、遊星歯車を回転自在に支持する転がり軸受の軸方向移動を抑止する固定プレートの異常摩耗を防止する。
【解決手段】回転軸の回転を該回転軸に取り付けられた太陽歯車から遊星歯車を介し減速して回転伝達機構に伝達し、該遊星歯車を転がり軸受13を介してキャリア又は固定部材11の円筒軸12に嵌合固定してなる減速装置において、円筒軸12の端面12aに押え部材16を固定し、該押え部材を転がり軸受端面に当てて転がり軸受13の軸方向移動を係止し、該押え部材の内部に摩耗検知回路に接続された電極21を転がり軸受端面との間に設定寸法の空隙を介在させて配置し、該押え部材の転がり軸受13に対する摺接面が摩耗して該電極と転がり軸受端面とが接触した時に摩耗検知回路を作動させて該押え部材の摩耗を検知するようにした。
(もっと読む)
回転検出装置
【課題】磁気検出素子の温度依存性の影響を受けることなく、ロータの回転態様を高い精度で検出することのできる回転検出装置を提供する。
【解決手段】この回転検出装置は、ロータ21の回転に伴い軸線n1の周りを回転する2つの磁石22a,22bを備え、磁石22a,22bが回転するときに磁石22a,22bから発せられる磁界の変化を磁気センサ23により検出してロータ21の回転角度を検出する。ここでは、磁石22a,22bを軸線n2の方向に並設するとともに軸線n3の方向に延伸された形状とし、且つ、軸線n2に沿って異極同士が向かい合う態様にてそれぞれ着磁する。また、磁気センサ23を、2つの磁石22a,22bに挟まれる領域から軸線n1の方向にギャップgだけずれた位置に配置する。そして、磁気センサ23から出力される電圧信号から逆正接値を演算し、この逆正接値に基づいてロータ21の回転角度を検出する。
(もっと読む)
操作位置判断装置及びパドルシフトスイッチ
【課題】信号の切替位置のずれを抑制し、誤作動を防止する操作位置判断装置及びパドルシフトスイッチを提供する。
【解決手段】センサIC23、24から出力されたアナログ出力は、波形整形部2Aに出力され、波形整形部2Aは、アナログ出力をリニア出力に変換し、リニア出力V1及びV2をECU100に出力する。ECU100は、リニア出力V1及びV2に基づいて差分値ΔVを算出する。またECU100は、算出した差分値ΔVと内部に記憶するしきい値とを比較し、差分値ΔVがしきい値よりも大きいときHi、小さいときLo、として、切替位置を判断する。
(もっと読む)
磁気利用の位置検出方法及び位置検出センサ
【課題】長距離の位置検出を可能とし、起動時のイニシャライズも不要とする磁気利用の位置検出方法及び位置検出センサを提供する。
【解決手段】位置検出方法は、所定の離隔距離で磁極対向させた一対の磁石の磁界内に、磁気検知手段をその感磁方向と該磁石の中心磁界方向と一致する直線上に移動可能に配置し、磁界強度変化を検出して相対位置情報を得るものである。また、直線上に基準位置を設定すると共に、磁界強度と磁気検知手段の移動位置との相関を予め特定して磁石間における磁気検知手段の絶対位置情報を得ても良い。位置検出センサは、所定の離隔距離をもって一対の磁石を磁極対向させて保持した磁石ベース体と、磁石間を結ぶ直線上にその中心磁界方向と感磁方向とを一致させて配置した磁気検知手段とから成り、磁気検知手段を取り付けた被検出対象物が直線上を移動するように構成する。
(もっと読む)
速度検出装置および位置検出装置および位置決め装置
【課題】安価で簡易な構成によりスライダの位置検出を安定して行うことができるとともに、設計の自由度の高い位置決め装置を実現する。
【解決手段】X軸方向に位置制御されるスライダ1と、このスライダ1と対向する面に磁極の歯が形成されてスライダ1と平面モータを構成するプラテン10とを有するとともに、
スライダ1のX軸方向の位置に応じた信号を出力するレゾルバ30と、スライダ1のX軸方向の加速度を検出する加速度センサ31とを備えた位置検出装置300を備え、
位置検出装置300がレゾルバ30と加速度センサ31の出力に基づいてスライダ1の位置を求めることを特徴とする位置決め装置。
(もっと読む)
操作位置判定装置
【課題】必要とする磁石の数を減らして部品点数を削減し、さらに組み付け性を向上させることができる操作位置判定装置を提供する
【解決手段】レバーコントロールスイッチ装置1の判定部5は、Z方向の操作位置を判定するため、第1のハーフブリッジ回路(S1_0°)の出力電圧V1と第5のハーフブリッジ回路(S3_0°(M1、M2))の出力電圧V5との差分を算出することで、出力電圧V11を算出する。判定部5は、この出力電圧V11の値によってX方向なら第1及び第3のMRセンサ40、42を構成するハーフブリッジ回路を組み合わせて出力電圧を算出し、Y方向なら第2及び第4のMRセンサ41、43を構成するハーフブリッジ回路を組み合わせて出力電圧を算出して、X、Y方向の操作位置を判定する。
(もっと読む)
回転検出装置
【課題】磁気検出素子の温度依存性の影響を受けることなく、ロータの回転態様を高い精度で検出することのできる回転検出装置を提供する。
【解決手段】この回転検出装置は、磁気センサ23と、ロータ21の回転に伴い軸線n1の周りを回転する磁石22とを備え、磁石22が回転するときに磁石22から発せられる磁界の変化を磁気センサ23により検出してロータ21の回転角度を検出する。ここでは、磁石22を、軸線n1に平行な軸線n2を中心軸とする円柱状に形成するとともに軸線n2の方向に着磁する。また、磁気センサ23を、磁石22の中心Csの描く回転軌跡を含む円周上から軸線n1の方向にギャップgだけオフセットした位置に配置し、さらに、その検出面を、磁石22の中心Csの回転平面と平行となる態様にて配置する。そして、磁気センサ23から出力される電圧信号から逆正接値を演算し、この逆正接値に基づいてロータ21の回転角度を検出する。
(もっと読む)
341 - 360 / 1,291
[ Back to top ]