
Fターム[2F063DA05]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 測定方法 (3,108) | 測定内容を直接信号に変換して測定 (1,291)
Fターム[2F063DA05]に分類される特許
261 - 280 / 1,291
変位検知装置とこれを利用した配管の変位検知方法
【課題】長尺状構造物における長手方向の広い範囲を検知領域にできる、設置が容易な変位検知装置を提供する。
【解決手段】配管1の表面に、溶接熱影響部2を挟んで互いに平行に配される左右のパルス波伝送ラインからなるセンサ部10と、各伝送ラインの一端からそれぞれ電気パルス波を入射し、その反射波を検知するETDR11と、センサ部10のインピーダンスを計測するインピーダンス計測装置12とを有する。左右の波伝送ラインは、配管1の表面に接着される長尺状の誘電板材16と、誘電板材16上にライン状に積層される金属電極17とを有し、クロストークが生じる間隔で配されている。そして、配管1が周方向に変位したとき、これに伴い両伝送ライン間の距離が変化することで電界分布が変化して、インピーダンス変化として検知されることを特徴とする。
(もっと読む)
変速位置検出装置

【課題】 ニュートラルを正確に検出することが可能な信号を出力する変速位置検出装置を提供する。
【解決手段】 鞍型乗車車両のギアシフト部材に連動して回動する回転部材2と、回転部材2とともに回動する磁石3と、磁石3に対向して配置され磁石3が回転することによって磁石3の磁界の強さを検出し電気信号を出力する磁気検出用集積回路4と、を備えた変速位置検出装置1において、磁気検出用集積回路4は、前記電気信号が、前記車両の前記ギアシフト部材の位置が1速、ニュートラル、2速を含む第1の領域A1で第1の変化量となる第1の出力特性C1と、第1の領域A1以外の第2の領域A2で第2の変化量となる第2の出力特性C2とを備え、前記第2の変化量に対し前記第1の変化量が大きくなるように設定されてなる記憶手段を有するものである。
(もっと読む)
挟み込み防止装置
【課題】車両の開閉部への物体の挟み込みを安全かつ確実に防止する。
【解決手段】挟み込み防止装置は、車両1のウィンドウ3Aが完全閉状態時に当接するウィンドウ枠部3Bの当接側端部3b内に枠形状に沿って配置され、物体を検知する静電容量センサ部10と、回路部20とを備える。静電容量センサ部10は、センサ電極11、シールド電極12および補助電極13を備える。センサ電極11のみで検出された第1の静電容量値C1とセンサ電極11および補助電極13で検出された第2の静電容量値C2とを用いて指向性を設定し、静電容量センサ部10の表面上に検知範囲Zを形成して乗員の手49や指などを検知し、ウィンドウ3A等に接触する前に閉動作を停止させる。
(もっと読む)
トルク・インデックスセンサ
【課題】インデックスセンサとトルクセンサとの干渉を低減し、インデックスセンサとトルクセンサを近接して一体として構成するトルク・インデックスセンサを提供する。
【解決手段】このトルク・インデックスセンサは、円環状の第1磁石部の側方に配置される第1磁気センサを含むトルクセンサと、円環状の符号器の側方に配置される第2磁石部と第2磁気センサを含むインデックスセンサと、が同軸上に構成され、前記トルクセンサの前記第1磁気センサと前記インデックスセンサの前記第2磁石部との間に、前記第2磁石部から前記第1磁気センサに向けて放射される磁束の方向を変化させる磁束変化手段を設けたことを特徴とするものである。
(もっと読む)
開閉式表示装置
【課題】蓋部材の開閉角度を簡単な構成で検知でき、該開閉角度に応じて表示画面に表示する画像の向きを切り替え可能な開閉式表示装置を得る。
【解決手段】本体部に対して開閉自在な蓋部材に表示画面を設けた開閉式表示装置において、蓋部材の開閉角度を検出する開閉角度検出機構と、検出された開閉角度に応じて表示画面に表示する画像の向きを切り替える制御手段とを備える。開閉角度検出機構は、本体部内に固定した磁気センサと、蓋部材の開閉軸部に該蓋部材と一体に回動可能に設けた永久磁石と、蓋部材の開閉軸部に永久磁石の外周を囲んで該永久磁石と一体に回動可能に設けた磁気シールド部材とにより構成する。蓋部材が全閉状態と全開状態にあるとき磁気センサと永久磁石の一方と他方の磁極が対向するように位置決めし、磁気シールド部材には永久磁石の両端部に対向する位置に開口部を設ける。
(もっと読む)
ロータリセンサ
【課題】寿命の延長が可能なロータリセンサを提供する。
【解決手段】ロータリセンサ1は、車体Bに連結されるハウジング2と、ハウジング2に対して回転可能に取り付けられ車体Bに対するスタンドSの回転に伴ってハウジング2に対して回転するロータ3と、導電材料からなりロータ3に保持された被検出体36と、
ハウジング2に保持されハウジング2に対するロータ3の回転に伴って被検出体36との間の距離を変化させるコイル81と、コイル81のインピーダンスに基いて車体Bに対するスタンドSの向きを検出する検出回路82とを備える。コイル81と被検出体36とは互いに接触しないことにより、接点のような磨耗による劣化が発生しないので、接点を用いる場合に比べて寿命の延長が可能となる。
(もっと読む)
歪みを測定するための装置及び方法
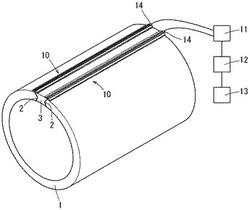
物体(3)の表面の歪みを測定するための装置であって、中心セクション(6)と、中心セクション(6)の両側に配置された2つの端部セクション(8)とが設けられたキャリア(5)を有する。歪み要素(10)が、キャリア(5)に接続され、この歪み要素(10)には、歪みセンサ(11)が設けられている。歪みを測定するための装置(1)は、所定の距離離れて物体(3)の表面に直接取着されることができる2つの支持脚(9)を有する。キャリア(5)の2つの端部セクション(8)は、各セクションで1つの支持脚(9)に着脱可能に接続されている。  (もっと読む)
(もっと読む)
ロータリセンサ
【課題】 寿命の延長が可能なロータリセンサを提供する。
【解決手段】 ロータリセンサ1は、車体Bに対して固定されるハウジング2と、導電材料からなりスタンドSに対して固定されるロータ4と、ハウジング2に保持され車体に対するスタンドSの回転に伴ってロータ4との間の距離を変化させるコイル31と、コイル31のインピーダンスに基いて車体Bに対するスタンドSの向きを検出する検出回路とを備える。ロータリスイッチを用いる場合に比べ、可動接点と固定接点とのように互いに同じ空間に配置するべき部品がハウジング2とロータ4との間に存在しないので、上記のような空間を密封するためのオイルシールが不要となるから、接点の磨耗やオイルシールの磨耗が発生しないことで寿命の延長が可能となる。また、オイルシールが不要となることで部品点数が減少し、製造コストの低減が可能となる。
(もっと読む)
位置検出装置及びそれを備えたベルト式無段変速機
【課題】検出データの処理の容易化及び位置検出精度の向上を図ることができる位置検出センサの提供。
【解決手段】回転軸方向へ直線移動する可動プーリ半体18の回転外周面18aに設けた被検出面51と、被検出面51に対向して配置されたホール素子53及びそれを囲む略コ字型の磁石54からなるセンサ本体52とを備え、可動プーリ半体18の移動に伴いセンサ本体52と被検出面51の距離が変化することで、ホール素子53の出力が変化して可動プーリ半体18の位置を検出できる非接触式の位置検出センサ50であって、可動プーリ半体18の被検出面51は、可動プーリ半体18の移動方向に沿って傾きが変化するように湾曲しつつ傾斜する湾曲傾斜面形状に形成されている。ホール素子53の出力分布が線形分布もしくは線形に近似した分布となるので、データ処理の容易化及び位置検出精度の向上が図れる。
(もっと読む)
慣性駆動アクチュエータのキャリブレーション方法、慣性駆動アクチュエータ装置及び移動体の位置算出方法
【課題】移動体と電極との間の静電容量が、アクチュエータ組み立て後に異なる値を示すようになっても、適切な値に修正することができ、これにより移動体の絶対位置を確実かつ正確に算出することのできる慣性駆動アクチュエータ装置を提供する。
【解決手段】移動体電極と振動基板電極とが対向する部分の静電容量を、一方及び他方の移動限界位置において検出する静電容量検出ステップと、静電容量検出ステップにおいて検出された、一方及び他方の移動限界位置での静電容量を記憶する静電容量記憶ステップと、静電容量記憶ステップにおいて記憶された一方及び他方の移動限界位置での静電容量と、一方及び他方の移動限界位置間の移動限界距離と、の比率を算出する比率算出ステップと、算出した比率を用いて、一方及び他方の移動限界位置間における移動体の絶対位置を算出する絶対位置算出ステップと、を備える。
(もっと読む)
測定スタンドおよびその電気制御方法
【課題】 特に薄層の厚さ測定に適した、測定用プローブを保持する測定スタンドおよびその制御方法の提供。
【解決手段】 測定用プローブ(26)を保持する保持器(24)を担持する変位部材(23)と、その変位部材を測定用プローブとともに上下に駆動する駆動ユニット(35)との間に、フリーホイール機構(51)を介在させ、測定用プローブ(26)または保持器(24)が測定対象(14)に接触すると、駆動ユニット(35)による駆動が変位部材(23)から切り離され且つスイッチング・デバイス(58)がスイッチング信号を制御ユニットへ送出する。
(もっと読む)
接触式ストロークセンサ
【課題】適用する移動体の組立作業を煩雑化することなく所望の検出精度を確保する。
【解決手段】摺動孔11aを有した第1のケース11と、第1のケース11に結合することにより、互いの間に油を充填した油室14を構成する第2のケース12と、第1のケース11に形成した油室14を外部に連通させる連通通路16と、先端部が外部に露出する状態で第1のケース11の摺動孔11aに進退可能に嵌合し、かつ油室14の内部に摺動孔11aよりも太径となるフランジ21を収容したシャフト20と、油室14に配設し、シャフト20の先端部を第1のケース11から常時突出する方向に押圧する押圧バネ50と、第2のケース12の外部においてシャフト20の変位量に応じた電気信号を出力するホール素子85とを備えた。
(もっと読む)
位置センサ
【課題】2つ以上の物体間の相対的な変位、特に、コントロール・バルブ・アセンブリにおけるバルブ・プラグの位置を正確に測定するセンサの提供。
【解決手段】磁束源とセンサハウジングからなる磁気式の非接触位置センサを使用する。磁束源は、回転式あるいは直線の変異に容易に適応される高度に設定可能な磁束源を生成するように選択的に決定された複数の個別の磁石50〜56の配列である。前記個別の磁石50〜56によって生成された前記個々の磁場の相互作用は、変位の変化に対して線形および非線形の両方の関係を生成するようにコントロールされる。磁束集合極片は、前記多数の個々の磁場を統合し、磁気センサ35に導く。
(もっと読む)
静電容量式障害物センサ及び当該障害物センサを備えた車両の開閉システム
【課題】開閉体を有する開口部における障害物の存在及び開閉体の位置を良好に検出可能な静電容量式障害物センサを提供する。
【解決手段】異なる周波数の交流信号を出力する複数の交流信号源15,16と、開閉体端部と枠体端部との何れか一方に設けられて開閉体端部と枠体端部との間に存在する障害物9との間の静電容量Csを検出する検出電極5と、開閉体端部及び枠体端部の他方に設けられた遮蔽電極7と、検出電極5及び遮蔽電極7に印加される交流成分f1,V1に基づいて、検出電極5と障害物9との間の静電容量Csを求め、障害物9が存在するか否かを判定すると共に、遮蔽電極7に印加されず検出電極5に印加される交流成分f2,V2に基づいて、検出電極5と遮蔽電極7との間の静電容量を求め、開閉体端部と枠体端部との距離を判定する制御部20とを有する。
(もっと読む)
多段モータを駆動源とする基板搬送ロボット
【課題】多段同芯モータを駆動源に有する基板搬送ロボットにおいて、モータの検出部が小型であって、アームの高い制御性能を確保でき、また検出部の交換が容易な基板搬送ロボットを提供する。
【解決手段】ロボットアームを駆動する第1回転モータ13と第2回転モータ14を軸方向に多段に配置した駆動部を有する基板搬送用ロボットにおいて、第1回転モータ13の回転位置検出部が、第1インクリメンタルエンコーダヘッド21と、それよりも回転位置検出精度の粗い絶対値位置検出器である回転角度センサ25a,bとから成り、第2回転モータ14の回転位置検出部が、第2インクリメンタルエンコーダヘッド22と、それよりも回転位置検出精度の粗い絶対値位置検出器である回転角度センサ26a,bとから成るよう構成した。
(もっと読む)
近接センサ
【課題】感度を増し、切換距離を増加することができ、更に費用を低減して製造することのできる誘導形近接センサを提供する。
【解決手段】第1送信コイル及び第2送信コイル並びに少なくとも1つの受信コイルと、前記第1及び第2送信コイルに接続された励起装置と、一方で少なくとも1つの送信コイル及び/又は前記励起装置に、他方で前記少なくとも1つの受信コイルに接続され、且つ、一方で少なくとも1つの送信コイル及び/又は前記励起装置の信号と、他方で前記少なくとも1つの受信コイルの信号との間の位相シフトに応じた評価信号を発生させるように設計された評価装置とを有する。
(もっと読む)
静電容量センサ
【課題】物体の位置を検出できるようにする。
【解決手段】検出電極Aと検出電極Bとは、所定の距離だけ離れた位置に配置され、シールド電極SEは、検出電極Aと検出電極Bを取り囲むようにして配置され、物体Pを検出する方向に開口部を有する。除算回路13は、物体Pと検出電極Bにより形成される静電容量Cbに応じたCV変換出力を、物体Pと検出電極Aにより形成される静電容量Caに応じたCV変換出力で除算し、その除算結果から得られる物体Pとの距離に関する情報を出力することにより、物体Pの位置が検出できるようになる。本発明は、車両等の開閉体等への人体の挟み込みの検出に用いられる静電容量センサに適用できる。
(もっと読む)
人体腔内壁の三次元測定方法、並びにその装置及びシステム
駆動信号励起のもと、分離可能なフィールドを発生する少なくとも一つのフィールド発生装置と、前記目標装置に位置し、前記分離可能なフィールドを検出しセンサ信号を発生する少なくとも一つのフィールドセンサと、前記フィールド発生装置に駆動信号を送信し、前記フィールドセンサ信号の出力を検出して、前記目標装置のセンサの存在する位置の五次元位置及び配向座標データを取得する位置決め信号処理装置と、を含む、人体腔内壁の三次元測定方法、並びにその装置及びシステム。 (もっと読む)
インペラ装置および回転式インペラの製造方法
【課題】回転式インペラ内部に埋設される磁性体等の磁気検出部材の高い位置精度、および埋設される磁気検出部材の封止に対する高い信頼性を有するインペラ装置および回転式インペラの製造方法を提供すること。
【解決手段】回転式インペラ30の回転位置を検出する磁気検出素子40または該磁気検出素子40と対をなす磁性体36のいずれか一方が前記回転式インペラ30に埋設されたインペラ装置において、前記回転式インペラ30には、前記磁性体36または磁気検出素子40の一方が挿入される開口301aを有する有底の凹部301が形成され、該凹部301の開口301aがインサート成形によって流し込まれた樹脂Rによって封止されて前記磁気検出素子40または前記磁性体36のいずれか一方が埋設されている。
(もっと読む)
歯の噛み合わせ測定装置
【課題】上下の歯の接触状態における移動距離に対する姿勢や軌跡を検出して表示して、歯の噛み合わせを正確に検出する。
【解決手段】歯の噛み合わせ測定装置は、下顎12の上顎11に対する相対位置と相対姿勢とを検出する位置検出センサ30と、この位置検出センサ30で検出される下顎12の上顎11に対する相対位置と相対姿勢から、上下の歯の接触状態における移動距離に対する相対姿勢を演算する演算回路31と、この演算回路31で演算される移動距離に対する相対姿勢を表示する表示モニタ32とを備える。
(もっと読む)
261 - 280 / 1,291
[ Back to top ]