
Fターム[2F063DA05]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 測定方法 (3,108) | 測定内容を直接信号に変換して測定 (1,291)
Fターム[2F063DA05]に分類される特許
201 - 220 / 1,291
特にCPR時の胸部パラメータを測定する方法及びシステム
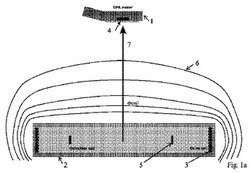
本発明は、人、特に人の胸部に配置される測定部の位置を監視するシステムに関し、本システムは、所定の周波数で振動する磁界を発生し、例えば、胸部から背中までのような人の反対側に位置するように構成される駆動部を含み、測定部は、磁界強度を測定するように構成され、システムは、測定部と駆動部との距離を算出する算出手段を含む。 (もっと読む)
表示装置及び表示装置の制御方法

【課題】可撓性を有する表示装置が湾曲した場合に表示状態を補償する。
【解決手段】可撓性を有する基板102,103と、基板に配列された複数の発光素子を有し、映像信号に応じた画像を表示する表示部110と、基板102,103の表面又は裏面に設けられ、基板102,103の湾曲状態を検知する変位センサ106と、基板102,103の表示部110が設けられた面に設けられ、光量を検出する受光部112,114と、変位センサ106により基板102,103の湾曲が検知された場合に、光量に基づいて画像を表示するための映像信号を制御する出力制御部130と、を備える。
(もっと読む)
磁気センサを位置決めするための方法及びセンサ
【課題】出力マグネットがピストンに付いているエアシリンダに沿って、磁気センサをセンサ規定位置に精度よく位置決めするための方法の提供。
【解決手段】以下のステップでセンサ10の位置決めを行う。a)スライド移動経路に沿ってセンサ10と出力マグネット12を、互いに相対的にスライド移動する。b)スライド移動中に、センサ−出力マグネット12の間隔により決まる測定信号を検知する。c)センサ規定位置を求める。d)センサ規定位置を表示する。e)センサ規定位置にセンサ10を固定する。
(もっと読む)
回転角度検出装置
【課題】磁性検出体の偏心量を小さく構成し、回転時の不具合の低減を図ることができる回転角度検出装置を提供する。
【解決手段】磁性検出体11は、円盤状をなし、径方向内側部分には外周面11cからの磁性部分11dの長さdを回転方向に徐々に変化させる溝部11bを備えてなる。そして、回転方向においてのその磁性部分11dの長さdの変化に基づく交番磁界の変化が磁気センサ12にて検出され、該検出により磁性検出体11の絶対角θ1の検出が行われる。
(もっと読む)
ポインティングデバイス
【課題】従来よりも小型で薄型であり、複雑な補正用ソフトウェアを作成することなく、高い操作感を備えた磁気検出式ポインティングデバイスを提供すること。
【解決手段】磁石103を備えた平行に揺動可能な操作部材と、操作部材の所定の方向への移動を検出するセンサ101a乃至101dと、センサのセンサ出力を信号処理する信号処理部104と、信号処理部104の信号処理の結果を出力する出力制御部108とを有している。磁石は、ホールセンサを実装した平面において直交するX軸方向及びY軸方向の長さよりも傾斜軸方向の長さが大きい形状を有している。
(もっと読む)
回転角検出装置及び電動パワーステアリング装置
【課題】高い検出精度を有するとともに、構成簡素且つ省電力にて、連続的に検出対象の絶対角を検出することのできる回転角検出装置を提供すること。
【解決手段】ECU11(マイコン21)は、ステアリングセンサが出力する正弦信号S_sin及び余弦信号S_cosに基づいて、絶対角である操舵角θsを検出する。また、ECU11は、正弦信号S_sin及び余弦信号S_cosに基づいて、所定の回転角(電気角)に対応したエッジを有するとともにそれぞれの各エッジに対応する所定の回転角が互いに重複することなく且つ均等間隔となるように設定された三相のパルス信号P1,P2,P3を生成する三相パルス生成器30を備える。そして、マイコン21は、これらの各パルス信号P1,P2,P3に基づいて操舵角(第2操舵角θs´)を演算する第2の回転角検出手段としての機能を備える。
(もっと読む)
媒体に封入されたオブジェクトの検出方法、ならびに該検出方法を実施するための測定装置
【課題】媒体に封入されたオブジェクトを可能な限り精確に位置検出できることを保証できる、該オブジェクトの検出方法を提供すること。
【解決手段】受信導体ループシステムによって検出された測定信号の信号強度に依存して、該検出された測定信号の信号強度が第1の閾値を超えた場合、該受信導体ループシステムによって検出される測定信号の強度が低減されるように、送信コイルに供給される該測定信号の周波数を変化させ、パルス幅変調を行うデジタル周波数発生器から、前記送信コイルを駆動制御する信号を間接的または直接的に取り出し、該周波数発生器のデューティ比を、検出された前記測定信号の信号強度に依存して適切に変化させることを特徴とする方法。
(もっと読む)
電磁アクチュエータの可動子の位置検出方法およびその検出装置
【課題】磁気飽和が生じることにより、コイルのインダクタンスが等しくプランジャとステータの底とのエアギャップが異なる2点が存在しても、プランジャの位置を正確に検出できる電磁アクチュエータの可動子の位置検出方法およびその検出装置を提供する。
【解決手段】コイル5に変動電圧を印加する第1工程と、変動電圧の印加によって生じるコイル5に流れる電流の立ち上がりまたは立ち下がりの状態を、立ち上がりまたは立ち下がりの間に複数回測定を行う第2工程と、第2工程で得られた複数の測定値と、基準となる測定値または計算値とをそれぞれ比較して可動子6の位置を求める第3工程と、を備える。
(もっと読む)
回転電機の回転子軸心位置測定方法及び回転電機の回転子軸心位置測定装置
【課題】回転子の軸心位置と固定子の中心とのずれを高価な測定装置を用いず簡単な構成で、高精度かつ短時間に測定することができる回転電機の回転子軸心位置測定方法及び装置を提供する。
【解決手段】固定子1においては互いに対向する固定子巻線15a、15bを有し、固定子1内には所定のエアギャップ5を介して回転子2が配置され、交流電圧源Vacによって固定子巻線15a、15bに電流を流し、固定子巻線15a、15bに流れる電流値の差を電流測定手段6によって測定することにより、回転子2の軸心の固定子1の中心軸に対する位置ずれの方向と大きさを測定する。
(もっと読む)
凶器類判別装置
【課題】刃物類等の凶器類等を隠し持った人が接近したことを察知することができる凶器類判別装置を提供する。
【解決手段】判別装置KSは、鉄類からなる金属類が凶器類に該当するか否かを判別することができる。判別装置KSは、金属類が形成する残留磁化をピコテスラオーダーの検出分解能で検出できるMIセンサSSを備えている。判別装置KSの制御装置CPは、MIセンサSSが検出した残留磁化による磁場分布を判別することで、凶器類になりえるか否かを推定することができる。制御装置CPはこの推定結果を報知することができる。
(もっと読む)
位置検出装置
【課題】表面に近い検出部の配線の手間を低減するとともに配線周りの構造を簡素化することができる位置検出装置を提供すること。
【解決手段】位置検出装置100は、人体により指示された位置を検出するものであって、複数の検出用電極が形成された検出領域112と検出用電極から引き出された配線が形成された配線領域114とを有するセンサ基板110と、センサ基板110が収納される筐体140とを備える。センサ基板110は、配線領域114と対向する位置に、固定電位に接続された導体116を有する。
(もっと読む)
渦電流センサ、研磨装置、めっき装置、研磨方法、めっき方法
【課題】渦電流センサが配置される周囲構造物の材料に影響されることなく、簡単な構成で高感度で且つ安定して導電性膜厚を検出できる渦流センサ及び該渦電流センサを提供すること。
【解決手段】導電性膜が形成された基体の近傍に配置されたセンサコイルを備え、該センサコイルに交流電流を通電することにより、前記導電性膜に渦電流を誘起し、該渦電流により発生する磁束変化をセンサコイルに誘起される誘起電圧により検出して前記導電性膜の膜厚を測定する渦電流センサにおいて、センサコイル21、22、23はセンサヘッド24に配置されており、センサコイル21、22、23はそれぞれA側とB側の一対のコイルからなり、一対のコイルの各コイルに通電した際に、センサヘッド24の一方のコイル周囲を周回する電流Iaが、他方のコイル周囲を周回する電流Ibと絶対値が同じで流れの向きが逆になるように配置した。
(もっと読む)
位置検出回路及びぶれ補正装置
【課題】基準電圧に起因する位置検出誤差をなくし、より高精度な位置検出結果を得ることができる位置検出回路及びぶれ補正装置を提供する。
【解決手段】バイアス出力生成部203a、203bは、ホール素子201a、201bから出力された信号に対して、基準電圧生成部202が生成する基準電圧に基づくバイアスをかけた信号を出力する。位置演算部200は、バイアス出力生成部203a、203bから出力された信号に基づいて、磁界発生部とホール素子201a、201bとの相対的な位置関係を示す信号であって、基準電圧に由来する成分を除去した信号を出力する。
(もっと読む)
弦楽器用弦高測定器
【課題】 弦楽器の弦高を精度よく測定し数値化する。
【解決手段】 被測定弦楽器に磁性体の計測弦を張りネック上に計測弦と空隙を持たせてU字型磁性体を置き、空隙を持った磁気回路を構成する。
この磁気回路に鎖交する一次コイルと二次コイルを置くと、これらの相互インダクタンスは空隙の大きさにより変化する。
この変化を一次電流と誘導二次電圧により計測する事で空隙の大きさを求め楽器ネックと弦の高さである弦高を測定する。
(もっと読む)
室内位置検出装置
【課題】GPSを使用することなく、端末装置の位置精度の高い室内位置検出装置を提供する。
【解決手段】周波数の異なる交流磁場を発生する少なくとも3つの磁場発生源2を有し、携帯端末内に配置される交流磁場のみを検出する3軸の高感度磁気センサ3と、姿勢検知用6軸センサ4と、磁気センサ3からの磁気ベクトル情報70から異なる周波数の磁場発生源2の周波数別の磁気ベクトル71を抽出する手段90と、前記磁気ベクトル情報71から最大磁気ベクトル情報72を演算する手段91と、前記最大磁気ベクトル情報72を鉛直座標系に変換演算する座標変換演算手段92と、座標変換後の最大磁気ベクトル情報73から位置ベクトル情報74を演算する手段93と、前記位置ベクトル情報74から距離情報75を演算する手段94と、前記距離情報75と磁場発生源2の位置情報から3角法に基づいて位置情報77を演算する手段95からなる室内位置検出装置1である。
(もっと読む)
テーパー状座面測定装置およびその測定方法
【課題】テーパー状座面の精度を測定することができるテーパー状座面測定装置を提供する。
【解決手段】テーパー面を有する座面101内に挿入されるヘッド部12と、ヘッド部表面に座面の深さ方向に少なくとも2つ以上設けられており、あらかじめ決められた基準点(ヘッド部表面)から座面101までのギャップ量を測定するギャップセンサー50と、を有することを特徴とするテーパー状座面測定装置。
(もっと読む)
樹脂被覆管の管端連結位置検出装置および方法
【課題】連結部の段差の発生による検出位置の誤差を補正可能な管端連結部検出装置の提供。
【解決手段】樹脂被覆後の管端連結部4を渦電流を用いて検出する渦流検出器1と、管端連結部4前後に発生する管端の段差量5を計測する段差量計測器2と、前記段差量5の計測結果が一定量以上の場合にのみ前記管端連結部4の検出位置信号に補正を加える補正演算器8とを有する、樹脂被覆管3の管端連結位置検出装置とした。
(もっと読む)
ステアリングセンサ
【課題】ステアリングシャフトが中立位置にあるときの検出分解能低下を抑制できるステアリングセンサを提供する。
【解決手段】テアリングセンサ10は、非円形歯車42と、非円形歯車42に噛合する非円形歯車50と、ステアリングシャフト20の回転を非円形歯車42に伝達する減速歯車30と、非円形歯車50の回転に起因して変化する磁界を電気信号に変換する磁気センサ70と、磁気センサ70の出力信号に基づいてステアリングシャフト20の操舵角を算出する信号処理回路80とを備える。ステアリングシャフト20の回転角に対する非円形歯車50の回転角の回転比率がステアリングシャフト20の中立位置において最大となるように設計されている。
(もっと読む)
変形計測システムおよび変形計測方法
【課題】導電率の影響を考慮して2以上の三軸センサの相対位置を計測することにより、盛立構造物の変形を高精度に計測することが可能な変形計測システム等を提供することを目的とする。
【解決手段】本発明にかかる変形計測システムの代表的な構成は、盛立構造物102に埋設される移動用三軸センサ110と、盛立構造物の表面近傍に配置される基準用三軸センサ112と、較正用三軸センサ114と、三軸センサから出力された信号を受信する信号受信部116と、導電率を入力する入力部118と、第1の磁場解析を行い磁場強度H1を導出する較正用磁場導出部122と、換算比率を導出する換算比率導出部124と、三軸センサが検出した誘起電圧E2と前記換算比率とから磁場強度H2を求める磁場強度換算部126と、第2の磁場解析を行い前記誘起電圧E2を誘起させる磁場を励磁させた三軸センサの位置を同定する位置同定部128とを備えることを特徴とする。
(もっと読む)
媒体厚検出装置及び画像形成装置
【課題】媒体の厚さを検出する期間が短い場合でも、厚さの検出精度を向上させること。
【解決手段】媒体Sに接触している接触回転体3の1回転以上の期間における接触回転体3の厚さ方向の移動量の履歴情報に基づいて、媒体有り移動量V2を演算する媒体有り移動量演算手段と、媒体Sに接触していない接触回転体3の1回転未満の期間T1における接触回転体3の厚さ方向の移動量の履歴情報と、媒体有り時の1回転以上の期間T2における履歴情報に基づいて導出された補正情報と、に基づいて、媒体無し移動量V1を演算する媒体無し移動量演算手段と、媒体有り移動量V2と媒体無し移動量V1と、に基づいて、媒体の厚さを検知する媒体厚検知手段と、を備えた媒体厚検出装置。
(もっと読む)
201 - 220 / 1,291
[ Back to top ]