
Fターム[2F063KA03]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 検出器から得られる信号の形式 (479) | 絶対的、アブソリュート信号 (56)
Fターム[2F063KA03]に分類される特許
1 - 20 / 56
位置検出装置、位置検出方法及び撮像装置

【課題】 小型化及び製造コストの低減を図った上で高分解能で高精度な可動レンズの位置検出を行う。
【解決手段】 所定の方向へ動作され連続的に増加又は減少する信号を出力して光軸方向へ移動される可動レンズの絶対位置を検出する第1の検出センサーと、所定の方向へ動作され周期的かつ連続的に変化する信号を出力して前記可動レンズの相対位置を検出する第2の検出センサーとを設け、前記第1の検出センサーと前記第2の検出センサーを異なら動作速度で動作するようにした。
これにより、第2の検出センサーの着磁ピッチを大きくしたり、第1の検出センサーとしてリニアリティー誤差やヒステリシスの小さいものを用いる必要がなく、小型化及び製造コストの低減を図った上で高分解能で高精度な可動レンズの位置検出を行うことができる。
(もっと読む)
位置検出ユニット、及びそれを備えたレンズユニット、カメラ、及びレンズユニットの製造方法、位置検出方法

【課題】起動時において検出対象物を所定の基準位置まで移動させることなく、絶対的な位置を検出することができる位置検出ユニットを提供する。
【解決手段】本発明は、位置検出ユニットであって、検出対象物(16)の変位に対し、単調に増加又は減少する単調信号を出力する第1センサ(20)と、検出対象物の変位に対して互いに位相がずれた2つの正弦信号を出力する第2センサ(24)と、検出対象物の位置に対する単調信号を記憶する第1記憶部(26)と、各正弦信号の極大値及び極小値を記憶する第2記憶部(26)と、検出された単調信号及び記憶された単調信号データに基づいて、検出対象物が正弦信号の何周期目に位置するかを特定すると共に、検出された正弦信号及び記憶された極大極小データに基づいて、特定された周期内における検出対象物の位置を計算し、絶対的な位置を求める位置演算部(28)と、を有することを特徴としている。
(もっと読む)
多回転位置センサ付軸受及び回転装置
【課題】組み立てコストを抑えながらコンパクトな多回転位置センサ付軸受及び回転装置を提供する。
【解決手段】回転軌道輪、固定軌道輪、転動体及び保持器からなる転がり軸受部と、前記保持器に固着され磁気的特性が周方向に変化する保持器側の被検出部と、この保持器側の被検出部に対向した1相のアナログ出力の磁気的センサからなる第1の磁気的検出部と、回転軌道輪に固着され磁気的特性が周方向に変化する軌道輪側の被検出部と、この軌道輪側の被検出部に対向した2相のアナログ出力の磁気的センサからなる第2の磁気的検出部を備えた多回転位置センサ付軸受であって、前記軸受の回転軌道輪の所定数以下の整数の回転数において、前記回転軌道輪に対応して回転する保持器の回転数が整数又は整数の近傍値のいずれでもないことを特徴とする多回転位置センサ付軸受。
(もっと読む)
移動体の位置読取装置
【課題】部品の寸法上の誤差や変形に関わらず移動体の位置を常に正確に読み取ることができる移動体の位置読取装置を提供する。
【解決手段】移動体の移動可能方向に延在形成され移動体の位置を記録する位置記録部110と、位置記録部を配置したフレーム120と、位置記録部と所定距離離間しかつ位置記録部に沿って延在するようにフレームに支持されたガイド軸130と、位置記録部に記録された移動体の位置を読み取る読取部140と、ガイド軸に沿って移動し、読取部が位置記録部と所定間隔隔てて対向配置するように読取部を備えたケース本体150と、ケース本体に備わった読取部とフレームに配置された位置記録部との間隔をケース本体がガイド軸の何れの位置にあっても一定となるようにケース本体を位置記録部に付勢する付勢部材160と、を備えた。
(もっと読む)
移動する構成要素の位置を磁気的に感知するシステムおよび方法
【課題】ロッドの強度に悪影響をもたらさず、磁気的に符号化された信号が消去されることのないピストンロッド感知システムを提供する。
【解決手段】ピストンロッド上の磁気的硬質層の領域の複数のトラック上に情報が磁気的に記録されている。磁場センサーが、磁気的に記録された領域の複数トラックに配置されている。複数トラックに配置された各磁場センサーは、ピストンロッドがシリンダに対して動く間、同一の磁化領域を感知する。別の磁場センサーは、同相除去を実施する際に使用する周囲場を感知することができる。書込みヘッドが、磁場センサーによって検出された損傷または消去された領域を動的に修復することができる。磁気的に記録された情報は相対符号化されている。バッテリーバックアップ電源によって活性化されて、磁場センサーと関係する回路は、機械装置がオフの間に引き続いてピストンロッドの動きを追跡することができる。
(もっと読む)
位置検出装置
【課題】識別数を増やした場合にも大型化を抑え、かつ誤検出を確実に防止すること。
【解決手段】顕微鏡本体20に配設した検出部31と、レボルバ10に配設した複数の被検出部40a,40bとを備え、検出部31が検出した被検出部40a,40bの検出結果に基づいて顕微鏡本体20に対するレボルバ10の回転位置を判別する装置であって、検出部31は、被検出部40a,40bに対する相対的な移動軌跡が共通の円弧となる位置に、相互に検出条件が異なる位置規定用検出部31A及び判別用検出部31Bを配設して構成したものであり、複数の被検出部40a,40bは、それぞれ位置規定用検出部31Aが検出対象とする位置規定用被検出部と、判別用検出部31Bが検出対象とする判別用被検出部とを有し、位置規定用検出部31Aが位置規定用被検出部を検出した際に判別用検出部31Bによって検出可能となる位置に判別用被検出部を配設した。
(もっと読む)
回転角度検出装置
【課題】主動歯車の回転角度を理論上検出可能とされる全範囲において正確に検出することができる回転角度検出装置を提供する。
【解決手段】マイクロコンピュータは、周期数iを求めるに際して、関係式(e)が成立する場合には式(c)に基づき周期数iを算出する。関係式(f)が成立する場合には式(c)の「θab−θa」の値に最大制限値θabLimitを加算して、また関係式(g)が成立する場合には式(c)の「θab−θa」の値に最大制限値θabLimitを減算して周期数iを算出する。この算出される周期数iを式(d)に適用して絶対回転角度θrを算出する。
i=(θab−θa)/(mΩ/z)・・・(c)
θr=m(α+iΩ)/z・・・(d)
0≦θab−θa≦θabLimit・・・(e)
θab−θa<0・・・(f)
θab−θa>θabLimit・・・(g)
(もっと読む)
多段モータを駆動源とする基板搬送ロボット
【課題】多段同芯モータを駆動源に有する基板搬送ロボットにおいて、モータの検出部が小型であって、アームの高い制御性能を確保でき、また検出部の交換が容易な基板搬送ロボットを提供する。
【解決手段】ロボットアームを駆動する第1回転モータ13と第2回転モータ14を軸方向に多段に配置した駆動部を有する基板搬送用ロボットにおいて、第1回転モータ13の回転位置検出部が、第1インクリメンタルエンコーダヘッド21と、それよりも回転位置検出精度の粗い絶対値位置検出器である回転角度センサ25a,bとから成り、第2回転モータ14の回転位置検出部が、第2インクリメンタルエンコーダヘッド22と、それよりも回転位置検出精度の粗い絶対値位置検出器である回転角度センサ26a,bとから成るよう構成した。
(もっと読む)
エンコーダスケール部材および取付方法
座標位置決め装置が開示される。座標位置決め装置は、取付面と、取付面に取付可能な移動案内部材と、目盛を感知するためのセンサを含む第一の部材であって、移動案内部材に取り付け可能な第一の部材と、使用時にセンサによって感知可能な第一の目盛セットを含むエンコーダスケール部材と、を備える。エンコーダスケール部材が取付面によって少なくとも第一の目盛セットの付近に支持されるよう、エンコーダスケール部材の少なくとも一部は取付面と移動案内部材の間に保持される。移動案内部材は、たとえば、ガイドレールまたは軸受であってもよい。このような座標位置決め装置で使用するエンコーダスケール部材もまた開示される。  (もっと読む)
(もっと読む)
電子的に支援された薬剤送達装置
本発明は、電子的に支援された薬剤送達装置に関する。薬剤送達装置は投与量データを検知するためのグレイコード型検出器を含むことができ、検出器は、交互の標識のシーケンスからなるコードトラック、およびコードトラックに沿って延びる方向に相互に離間して配置された複数の検出器を含む。薬剤送達装置は、投与量設定時に近位方向へ、投与量注入時に遠位方向へ移動する投与量セレクタを含んでもよく、投与量セレクタはラッチ掛け要素によって投与完了位置にラッチ掛けされる。ラッチ掛け要素は、投与完了状態を示すための投与完了スイッチを作動する。薬剤送達装置は、組み込み電子回路の消費電力を効果的に最小化する電力管理機能を組み込んでもよい。  (もっと読む)
(もっと読む)
誘導式位置センサー、誘導式位置センサーを備えた測定システム及び位置センサーの動作方法
本発明は、受信導体(1.11,1.12,1.13;1.21,1.22,1.23)で検出した信号(S1.11,S1.12,S1.13;S1.21,S1.22,S1.23)から、先ずは三つのデジタル信号(S3.51,S3.52,S3.53;S3.61,S3.62,S3.63)を生成することが可能であるように構成された電子回路(3)を備えた誘導式位置センサーに関する。本発明では、これらの三つのデジタル信号(S3.51,S3.52,S3.53;S3.61,S3.62,S3.63)の組合せによって、少なくとも二つの位置の値(P,P3.71,P3.72;P3.81,P3.82,P3.83)を算出することが可能であり、これらの位置の値(P,P3.71,P3.72;P3.81,P3.82,P3.83)を比較器(3.20,4.1)に供給することが可能である。更に、本発明は、誘導式位置センサーの動作方法、並びに位置センサーに加えて、データインタフェース(5.20,4.20)と、比較器(4.1)を備えた後続の電子機器(4)とを有する測定システムに関する。 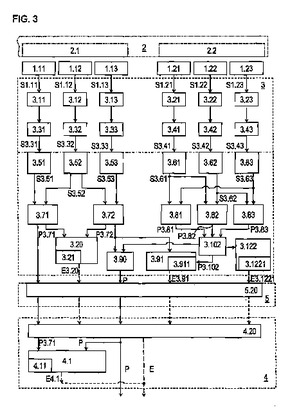 (もっと読む)
(もっと読む)
車両用舵角検出装置及びこれを使用した電動パワーステアリング装置
【課題】簡易な演算処理で、長時間の旋回や片方の修正舵などによる誤推定を抑制することができる車両用舵角検出装置及びこれを使用した電動パワーステアリング装置を提供する。
【解決手段】車両のステアリング機構の相対舵角θrを検出する相対舵角検出手段14,31と、既知の車両全舵角範囲θtを記憶する全舵角範囲記憶手段24と、該全舵角範囲記憶手段24に記憶された前記車両全舵角範囲θtと、前記相対舵角検出手段31で検出した前記相対舵角θrとに基づいて前記ステアリング機構の絶対舵角推定値θaを演算する絶対舵角推定値演算手段26とを備えている。
(もっと読む)
位置検出装置、レンズ鏡筒及びカメラ
【課題】回転角や移動量を電圧に変換することにより相対距離を測定可能な位置検出装置を提供する。
【解決手段】本発明の位置検出装置は、第1部材(2,102)に対して移動する第2部材(3,103)と、前記第1部材と前記第2部材のうちの一方に、前記第2部材の移動方向に沿って配置された複数の電極(6a,6b)と、前記複数の電極上を、前記複数の電極の配置方向に沿って延在する第1抵抗体(8)と、隣接する前記電極に対して互いに異なる電圧を印加する印加手段(4a)と、前記第1部材と前記第2部材のうちの他方に設けられ、前記第2部材の移動に伴って前記第1抵抗体に接触して移動する第1接触部材(9)と、前記第1接触部材に印加される電圧に基づいて、前記第1部材に対する前記第2部材の位置を検出する検出手段(4b)と、備えることを特徴とする。
(もっと読む)
エンコーダ及びこのエンコーダを操作する方法
【課題】停電時のエネルギー消費を低下させた絶対位置測定用エンコーダを提供する。
【解決手段】励磁電流Iが、スイッチ素子2.25を切り替えることによってターンオン期間を有するターンオンパルスで生成されること、及び、前記ターンオンパルスの立ち下りエッジ後の領域内で位置情報を算出するため、第1検出巻線2.221および第2検出巻線2.222内で誘導した少なくとも1つの電圧(U1,U2,U3,U4)が測定される。
(もっと読む)
回転角度検出装置
【課題】主に自動車のステアリングの回転角度検出等に用いられる回転角度検出装置に関し、誤検出がなく、回転角度の確実な検出が可能なものを提供することを目的とする。
【解決手段】制御手段17が所定周期で第一及び第二の検出手段15と16からの回転信号を検出すると共に、検出した回転信号と直前の回転信号とを比較して、回転体1の回転角度を出力することによって、磁気検出素子15Bや16Bにアナログ方式の磁気検出素子を用いた場合でも、誤った回転角度を出力することを防ぐことができるため、誤検出がなく、回転角度の確実な検出が可能な回転角度検出装置を得ることができる。
(もっと読む)
位置検出装置
【課題】静電容量方式を用いた第1の検出部における検出精度を低下させることなく、電磁誘導方式を用いた第2の検出部における検出精度の低下を防止又は抑制する。
【解決手段】位置指示器2と、略平板状に形成された第1の検出部13と、この第1の検出部の他方の面と対向する位置に設けられた第2の検出部14とを備えている。位置指示器2は、コイル27を有している。第1の検出部13は、その一方の面に、人体との間の静電容量を検出するための検出電極5を備えている。また、第2の検出部14は、磁束Gを検出するループコイル24を備えている。そして、検出電極15は、略平板状に形成されると共に、外縁から内側に延在するスリットを少なくとも一つ以上有している。これにより、静電容量方式を用いた第1の検出部における検出精度の低下を防止又は抑制すると共に、電磁誘導方式を用いた第2の検出部における検出精度の低下を防止又は抑制することができる。
(もっと読む)
シリンダ位置検出装置
【課題】ピストンロッドが回転したとしても誤差のないストローク位置検出を行うこと。
【解決手段】ピストンロッドの表面において、該ピストンロッドの直線的ストローク変位の方向に沿って面積が漸増又は漸減する区間を有する所定のパターンで配置された少なくとも1つの磁気応答部と、シリンダ本体の側に固定され、前記磁気応答部のパターンの夫々に対応して設けられたコイルとを具備する。ピストンロッドの直線的ストローク変位に応じて、該コイルに対する磁気応答部の対応面積が変化し、この対応面積の変化に応じて該コイルに生じる電気的インピーダンスが変化する。コイルは、ピストンロッドの回転によって磁気応答部のコイルに対する対応位置が相対的に円周方向に変位することを許容すべく、該磁気応答部に対向する該コイル端部の幅員を、該磁気応答部のパターンの円周方向についての最大幅よりも所定角度範囲だけ幅広に構成される。
(もっと読む)
多回転絶対角検出装置
【課題】360度以上の角度範囲内の絶対角度を高精度に検出可能な多回転絶対角検出装置を提供する。
【解決手段】機構部に、回転体1と、回転体1に従動する従動回転部材2と、従動回転部材2に従動して間欠的に回転する間欠回転部材3と、従動回転部材2に取り付けられた磁石4と、磁石4と対向に配置され、従動回転部材2の1回転を1周期とする正弦信号及び余弦信号を出力する磁気センサ5と、間欠回転部材3に形成された第1及び第2のコードパターン6,7と、これらの各コードパターン6,7に対向して配置された第1乃至第7の検出素子8〜14とを含む。検出素子8〜14の出力信号に基づいて回転体1の1回転を等分するセクタを識別し、正弦信号及び余弦信号から算出される逆正接値に基づいてセクタ内の絶対角を検出する。回転体1と従動回転部材2との間に、中間回転部材23を配置することもできる。
(もっと読む)
舵角検出装置
【課題】検出手段に異常があったとしても正確な舵角を検出できるようにする。
【解決手段】操舵軸13と一体的に回転する第1歯車41を設け、この第1歯車41に複数の連動歯車43A,43Bを介して連動して回転する第2歯車42を設ける。第2歯車42は、第1歯車41と歯数が異なり、第1歯車41に対して相対回転する。複数の連動歯車43A,43Bは、互いに歯数が異なる。そして、第2歯車42の回転角度に応じた信号を第1検出手段49により出力し、複数の連動歯車43A,43Bの回転角度に応じた信号を複数の第2検出手段52により出力する。第1検出手段49及び複数の第2検出手段52により出力された3つ以上の信号のうちの2つを選択してなる複数の組み合わせから、複数の操舵軸13の回転角度を演算して求める。
(もっと読む)
回転軸の絶対回転角検出装置
【課題】二つ以上の相対角センサの検出信号を利用し、簡単かつ高精度に回転軸の絶対回転角を検出する。
【解決手段】回転軸12の二つの相対角センサ20P、20Q及び電動モータ22の相対角センサ24から得られる電気角信号Sp、Sq、Srに基づき、角度信号平滑化手段32において、絶対回転角信号Abを求める。この際、角度信号平滑化手段32で得られる絶対回転角信号の所望の周期的変動数Sと、減速機26の減速比a:bと、二つの相対角センサ20P、20Qの軸倍角p、qと、電動モータ22の相対角センサ24の軸倍角rと、回転軸12の許容回転数Nとが、各相対角センサの軸倍角の如何に関わらず、S=|(p+q)×N−r×N×(a/b)|=1の関係を満たすように各値を設定することで、絶対回転角信号Abは回転軸12の絶対回転角と一対一の対応となる。
(もっと読む)
1 - 20 / 56
[ Back to top ]