
Fターム[2F065AA14]の内容
光学的手段による測長装置 (194,290) | 測定内容 (27,691) | 位置;移動量 (12,734) | 特殊なもの (4,038) | パターン位置 (417)
Fターム[2F065AA14]に分類される特許
161 - 180 / 417
露光装置、露光方法及びデバイス製造方法
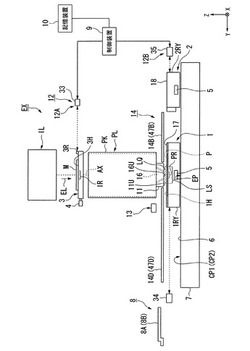
【課題】スケール部材を用いる計測誤差の発生を抑制し、露光不良の発生を抑制できる露光装置を提供する。
【解決手段】露光装置は、露光光で物体を露光する。露光装置は、物体を保持して所定面内を移動可能で且つ、格子を含むスケール部材が配置される移動体と、所定面内における移動体の位置情報を計測する計測システムと、移動体に保持された物体の表面の位置情報を検出する検出システムとを備えている。検出システムが、スケール部材の表面の異物を検出する。
(もっと読む)
位置合わせ方法、アライメントシステムおよびアライメントマークを有する製品

【課題】 選択可能な回折次数の放射のために様々な偏光成分に対する微細なラインパターンにより空間的に変化する反射特性を可能にするアライメントマークを製品にもたらすことである。
【解決手段】 製品の位置はその製品上のアライメントマークを使用して測定される。放射がアライメントマークに向かって伝送され、アライメントマーク内のパターンによって回折される。位置情報は回折された放射の位相関係から決定される。アライメントマークは、それから回折された放射が収集される相互に平行な導電体トラックのセットを備え、そのパターンは連続するトラックの間のピッチが、製品の表面に沿った位置の関数として変化するパターンによって決定される。したがって例えばパターンは、ピッチが第1および第2の値をそれぞれ有する交互となった第1および第2の領域を備える。第1および第2の領域のようなパターンの異なる部分においてトラックは互いに平行なのでより良い測定が可能である。
(もっと読む)
カラーコード付き標識、カラーコード抽出手段及び三次元計測システム
【課題】コードの読み誤りを生じないように選択された色彩のカラーコードを有するカラーコード付き標識及びその自動検出処理技術を提供する。
【解決手段】本発明によるカラーコード付き標識CT1は、面内に、計測位置を示すための位置検出用パターンP1と、色彩の基準として用いる異なる色彩が施された複数の単位エリアを有する基準色パターンP2と、標識を識別するための異なる色彩が施された複数の単位エリアを有するカラーコードパターンP3とを備え、カラーコードパターンP3の色彩は、HSI色空間において隣接する色彩同士が、少なくとも色相差、彩度差、明度差のいずれか1つが所定値以上になるように選択される。
(もっと読む)
電子部品実装装置における校正方法
【課題】 ロータリヘッドを備えた部品移載装置を移動台に交換可能に固定した電子部品実装装置において、交換した部品移載装置のロータリヘッドの各スピンドルの回転中心位置の各補正値を容易且つ正確に求める。
【解決手段】ロータリヘッドの複数のスピンドルの中、実装ポイントに割出されたスピンドルの回転中心が、校正された部品認識用カメラの光軸の座標位置に位置するように移動台を移動する。各スピンドルを第1回転角度位置および第1回転角度位置と異なる第2回転角度位置にそれぞれ位置決めした状態で各スピンドルに装着された吸着ノズルの先端を部品認識用カメラで撮像する。実装ポイントに割出された第1および第2回転角度位置での各吸着ノズルの先端画像の中心位置に基づいて各スピンドルの回転中心位置の各補正値を効率的に正確に求めることができる。
【選択図】図7  (もっと読む)
(もっと読む)
画像認識カメラのキャリブレーション方法、部品接合方法、部品接合装置および校正用マスク
【課題】簡単な構成で、画像認識カメラのキャリブレーションを精度良く行うことができる画像認識カメラのキャリブレーション方法を提供する。
【解決手段】基準マークMa,Maを形成した透光性の校正用マスク31を用い、画像認識カメラ6により、上昇待機位置S2に移動した校正用マスク31の基準マークMa,Maを位置認識する第1マーク認識工程と、第1マーク認識工程の後に、校正用マスク31を降下させワークテーブル4にセットするマスクセット工程と、マスクセット工程の後に、画像認識カメラ6により校正用マスク31の基準マークMa,Maを、位置認識する第2マーク認識工程と、第1マーク認識工程および第2マーク認識工程においてそれぞれ位置認識した2つの認識結果に基づいて、校正データを取得する校正データ取得工程と、を備えた。
(もっと読む)
光検出手段、駆動制御装置及び画像形成装置
【課題】各種のベルト状又はドラム状の無端状の走行体の駆動制御装置において、単一のセンサに複数の受光領域を設けた光検出手段を用いて無端状の走行体の移動速度を高精度に制御する。
【解決手段】無端状の走行体10の走行方向に所定の周期パターンで複数のマーク11を設け、光検出手段には、光ビームの光路上に複数のスリットを有して光ビームを複数の光ビームに分割するスリットマスクと、各光ビームに対応する受光領域を有し、各マークにより反射された各光ビームを受光し、各光ビームに基づいて電気信号を生成する受光手段5とを備えた。
(もっと読む)
画像認識カメラのキャリブレーション方法、部品接合方法および部品接合装置
【課題】簡単な構成で、画像認識カメラのキャリブレーションを精度良く行うことができる。
【解決手段】基準マークMa,Maを形成した透光性の校正用マスク31を用い、所定の位置に移動した画像認識カメラ6により、保持ヘッド2に保持され上昇待機位置S2に移動した校正用マスク31の基準マークMa,Maを、一方の鏡筒21,22を介して位置認識すると共に、保持ヘッド2に保持され接合位置S1に移動した校正用マスク31の基準マークMa,Maを、他方の鏡筒21,22を介して位置認識するマーク認識工程と、マーク認識工程において位置認識した2つの認識結果に基づいて、校正データを取得する校正データ取得工程と、を備えた。
(もっと読む)
マッピングテーブル生成兼検証用物品
【課題】手間と時間を掛けずにマッピングテーブルを生成、検証することができ、かつ、検証の精度を下げずにマッピングテーブルを検証することができる「マッピングテーブル生成兼検証用物品」を提供する。
【解決手段】格子点を規定するマッピングテーブル生成用図柄1100を描画したマッピングテーブル生成用図柄部100と線分を規定するマッピングテーブル検証用図柄1110を描画するマッピングテーブル検証用図柄部110を設けたマッピングテーブル生成兼検証用物品を提供するようにしている。そして、マッピングテーブル検証用図柄1110の線分を延長したときマッピングテーブル生成用図柄部100を通過する直線が、一連の格子点を結ぶ線分を含むようにすることによって、線分の直線性、直交性を評価する上で、マッピングテーブル検証用図柄1110とマッピングテーブル生成用図柄1100とを一体的に取り扱うことができるようにする。
(もっと読む)
取付姿勢測定装置
【課題】ヘリオスタット3に取付けられる反射鏡(ファセット31)を擬似的に回転円錐曲線面に合わせる作業を、効率的且つ簡易な取付調整を行うようにする。
【解決手段】太陽光集光用のヘリオスタット3を構成している反射鏡(ファセット31)の取付姿勢測定装置であって、前記ファセット31が形成する擬似的な球面51の中心に設けた画像取得装置12と、該画像取得装置12近傍に設置されたターゲット11と、画像表示装置13とを具備した。
(もっと読む)
位置検出器、露光装置及びデバイス製造方法
【課題】 検出すべきマークの近傍にテンプレートとのマッチング度が高い偽パターンが存在していても、検出すべきパターンを確実に検出可能な位置検出器を提供する。
【解決手段】 本発明は、基板Wに形成されたマークWMの位置を検出する位置検出器Mであって、生成部9とサーチ部13と補正部14とを含む。生成部9は、検出すべきマークWMを含む画像に基づいて当該マークWMを識別するために使用されるテンプレートを生成する。サーチ部13は、検出すべきマークWMを含む画像を生成部9によって生成されたテンプレートを用いてサーチし、検出すべきマークWMのパターン以外にテンプレートとのマッチング度が基準値より高い偽パターンが存在するか否かを判断する。補正部14は、偽パターンが存在すると判断された場合に、偽パターンの情報に基いて、生成部9によって生成されたテンプレートを補正して、偽パターンとのマッチング度が基準値を下回る補正されたテンプレートを生成する。
(もっと読む)
マーク位置検出方法および装置
【課題】露光装置において、デバイス製造現場で発生するWISを高精度に補正するアライメント方法を提供する。
【解決手段】マーク信号の特徴を定量的に表した複数のマーク特徴量を算出し、各マーク特徴量からWIS予測量を算出してアライメント結果を補正する。各マーク特徴量からWIS予測量を算出するための変換係数は、デバイス製造現場で実施する重ね合わせ検査の結果を露光装置へ入力することで更新する。これにより、デバイス製造プロセスが変化するような状況においても、WISを除去した高精度なアライメントを行うことが可能となる。また、各ショットのマーク特徴量を統計計算して「マーク特徴量のショット配列成分」を算出し、重ね合わせ検査の結果より更新した「各ショット配列成分の変換係数」を用いて、「ショット配列補正値のWIS予測量」を算出し、アライメント時のショット配列補正値を補正する。
(もっと読む)
位置合わせ方法及び装置、リソグラフィ装置、計測装置、及びデバイス製造方法
【課題】より小さいアライメントマーカや異なる波長の放射を使用できるようにし、プロセス変動を受けたマーカを検出できる改良アライメントシステムを提供する。
【解決手段】アライメントセンサは、放射ビームを角度分解スキャトロメータに供給する空間干渉性放射源を含む。瞳面は、放射の半径方向位置が基板での入射角を規定し、角度位置が放射の方位角を規定する。検出器は、基板ターゲットの2次元角度散乱スペクトルを測定できるように、2次元検出器であることが好ましい。アライメントは、スキャトロメータに対して基板をスキャンしている間に、散乱スペクトル内でうなりを検出することによって実行される。
(もっと読む)
検査装置及び検査方法
【課題】探索画像中にテンプレートと類似したパターンが存在する場合でも正確なマッチング位置を出力する検査装置及び方法を提供する。
【解決手段】画像探索部にテンプレート選択画像におけるテンプレートの相対位置と探索画像における現在探索中の場所の相対位置を比較してその位置ずれ量を出力する相対位置比較部を有し、マッチング位置決定部において探索画像類似度分布情報のみならず、前記位置ずれ量をも考慮しマッチング位置を決定する。
(もっと読む)
微小寸法測定方法および測定装置
【課題】
従来の微小寸法測定装置では、非測定物の測定画面に、類似あるいは同一のパターンが複数個ある場合、予め登録したパターン以外の同一または類似のパターンで測定する恐れがある。
【解決手段】
被測定物の所定部分を拡大してTVカメラで撮像し、該撮像した上記TVカメラの画像から画像処理により所定パターンの寸法を測定する微小寸法測定方法において、上記TVカメラの画像上に所定の大きさのサーチエリアと上記所定パターンをパターンマッチングで検出するための測定基準窓を設定し、上記測定基準窓を上記所定の大きさのサーチエリア内を適宜移動して上記所定パターンを検出するように構成される。
(もっと読む)
位置検出装置及び位置検出方法
【課題】疑似マッチングを無くしてマッチング精度を向上させ且つテンプレートマッチング処理時間の短縮を図ることが可能な、位置検出装置を提供すること。
【解決手段】検索対象画像中のテンプレートと合致するマークパターンの位置を検出する装置であって、前記検索対象画像に、該画像を構成する画素中、隣接する画素との間で変化する部位を抽出する、画像処理を施す検索対象画像処理部20と、前記画像処理が施された前記検索対象画像中の、前記テンプレートのテンプレート画像と合致する前記マークパターンの位置を検出する検出部(テンプレートマッチング処理部40)と、を備える。
(もっと読む)
基準値の経時変化シフト量の補正方法
【課題】基準値の経時変化シフト量を推定してその物理量決め補正値を求める基準値の経時変化シフト量の補正方法を提供する。
【解決手段】当初の基準位置A1〜A3をキャリブレーション手段を用いて決定すると同時にその時間T1〜T3を記録する工程と、ワークを所定期間又は所定の数量、当初の基準位置A1〜A3を基準として用いてアライメントを行うと共に、アライメント時間t1〜t7を記録する工程と、再びキャリブレーション手段を用いて最新の基準位置A2〜A4を決定すると同時にその時間T2〜T4を記録する工程と、当初の基準位置と最新の基準位置との差Δ1〜Δ3と両基準位置を決定した間の経過時間と、個々のアライメント時間とを用いて当初の基準位置からの、個々のワークのアライメント時の個々のシフト量Δ1−1〜Δ2−2を推定し、個々のワークのアライメント補正値とする。
(もっと読む)
マーク検出方法及び装置、位置制御方法及び装置、露光方法及び装置、並びにデバイス製造方法
【課題】物体上の複数のマークを効率的に、かつ高精度に検出する。
【解決手段】少なくとも1軸方向に関する検出領域が互いに異なる複数のアライメント系で、少なくともその1軸方向に関して互いに異なる位置に配置されたウエハ上のマークを検出するマーク検出方法であって、複数のアライメント系の検出領域にそれぞれウエハ上のマークを移動するステップ315と、ウエハをZ方向にスキャンして複数のアライメント系の検出信号及びデフォーカス量に対応するフォーカス信号を取り込むステップ316と、複数のアライメント系の検出信号とフォーカス信号とからフォーカス信号のオフセットを求めるステップ317とを有する。
(もっと読む)
マーク検出方法及び装置、位置制御方法及び装置、露光方法及び装置、並びにデバイス製造方法
【課題】物体上の複数のマークを効率的に、かつ高精度に検出する。
【解決手段】複数の検出領域を備えたアライメント系でウエハマークを検出するマーク検出方法であって、第1検出領域AL1fで検出した基準マークFMを、基準マークFMを備えたステージの位置情報を計測しつつ第2検出領域AL24fに移動して、第2検出領域AL24fで基準マークFMを検出し、検出領域AL1f,AL24fで基準マークFMを検出した結果と、位置計測装置からの位置情報とを用いて、検出領域AL1f,AL24fの相対位置情報を求めた後、検出領域AL1f,AL24fで実質的に同時に別の位置のウエハマークを検出する。
(もっと読む)
検査方法および装置、リソグラフィ装置、リソグラフィ処理セルおよびデバイス製造方法
【課題】パターンの画像を測定しているパターン付き基板上の位置を正確に決定する方法および装置を提供することである。
【解決手段】基板特性の測定方法は、放射ビームBがマスクMAを通過するように構成されたパターン付きマスクを生成してパターンを取得すること、マスクを使用してパターンが与えられたパターン付き放射ビームでの基板Wの照射をシミュレーションしてシミュレーションパターンを獲得すること、パターニングの誤差が発生しやすいシミュレーションパターンの少なくとも1つの位置を決定すること、および、リソグラフィプロセスを使用して前記パターン付き放射ビームで前記基板を照射することを含む。方法は、パターニングの誤差が発生しやすいとして決定された基板上のパターンの少なくとも1つの位置の少なくとも1つの特性の精度を測定し、測定に従ってリソグラフィプロセスを調整することも含む。
(もっと読む)
計測プログラム、計測装置、及び計測方法
【課題】画像を用いた位置の計測において計測結果に対する画像の撮像環境による影響を低減させることのできる計測プログラム、計測装置、及び計測方法の提供を目的とする。
【解決手段】コンピュータに、計測対象に付加された第一のマークが焦点深度外で撮像された画像において少なくとも前記第一のマークを含む領域の明暗分布を算出する明暗分布算出手順と、前記明暗分布に基づいて前記計測対象の位置を判定する位置判定手順とを実行させることにより上記課題を解決する。
(もっと読む)
161 - 180 / 417
[ Back to top ]