
Fターム[2F065AA14]の内容
光学的手段による測長装置 (194,290) | 測定内容 (27,691) | 位置;移動量 (12,734) | 特殊なもの (4,038) | パターン位置 (417)
Fターム[2F065AA14]に分類される特許
101 - 120 / 417
膜厚測定装置及び測定方法
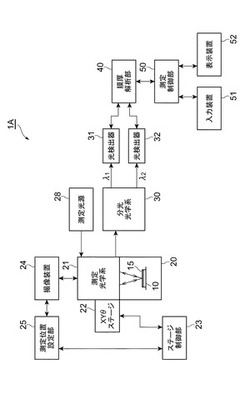
【課題】 膜状の測定対象物の膜厚の時間変化を精度良く測定することが可能な膜厚測定装置、及び膜厚測定方法を提供する。
【解決手段】 第1波長λ1の測定光成分、及び第2波長λ2の測定光成分を含む測定光を測定対象物15へと供給する測定光源28と、測定対象物15の上面からの反射光及び下面からの反射光の干渉光について、第1波長λ1の干渉光成分、及び第2波長λ2の干渉光成分に分解する分光光学系30と、第1、第2干渉光成分のそれぞれの各時点での強度を検出する光検出器31、32と、膜厚解析部40とを有して膜厚測定装置1Aを構成する。膜厚解析部40は、第1干渉光成分の検出強度の時間変化での第1位相と、第2干渉光成分の検出強度の時間変化での第2位相との位相差に基づいて、測定対象物15の膜厚の時間変化を求める。
(もっと読む)
三次元計測用画像撮影装置

【課題】撮影者を現在位置から次回撮影予定位置へ的確にガイドする三次元計測用画像撮影装置を提供する。
【解決手段】本発明による三次元計測用画像撮影装置1は、測定対象物8を単カメラにより重複させながら順次撮影する三次元計測用画像撮影装置において、撮影者が移動しながら測定対象物8を撮影することによりライブ画像11を取得し、適時に静止画像である撮影画像を取得する撮影部2と、撮影部2の現在位置でのライブ画像11と次回撮影予定位置と略同じ相対的位置関係で撮影された静止画像である模擬対象物の見本画像12とを同一画面内に表示する表示部3と、撮影部2の現在位置でのライブ画像11と見本画像12とを比較して、次回撮影予定位置に対する撮影部2の相対的位置を判定する撮影位置判定部4と、現在位置から次回撮影予定位置へ撮影者が移動するようにガイド情報を作成し表示部に報知させる移動情報報知部5とを備える。
(もっと読む)
位置計測システムおよびプログラム
【課題】 対象物に取り付けられた標識セットが別の対象物に取り付けられた標識セットと一部重なる場合でも、標識セットを構成する基本標識を別の標識セットの基本標識と混同することなく位置計測を行うことができる位置計測システムおよびプログラムを提供する。
【解決手段】 位置計測システムは、対象物31に取り付けられた、方向を示す形状をもち特定点30の方向を向いている位置関係の分かっている3つ以上の方向付基本標識bを有する標識セットと、この標識セットを撮像する2次元撮像素子11を有するカメラ12と、カメラ12で撮像した、特定点30の方向を向いている方向付基本標識bの画像に基づいて対象物31の位置および角度の少なくとも一方を演算する演算装置13とを備える。
(もっと読む)
三次元計測用画像撮影装置
【課題】単カメラを用いて移動しながら撮影を行う場合に、撮影を過不足なく効率的に行なえる三次元計測用画像撮影装置を提供する。
【解決手段】本発明による三次元計測用画像撮影装置1は、測定対象物2を単カメラにより重複させながら順次撮影する三次元計測用画像撮影装置1において、識別コードを有するマークを測定対象物2と共に撮影し、撮影画像からマークを抽出し、マークの識別コードを識別し、撮影画像について測定対象物2の領域をマークで囲まれた撮影領域に区分し、各撮影領域について異なる撮影画像に含まれる数を計数し、撮影回数に応じて撮影領域をグループ分けし、測定対象物2の撮影範囲画像の座標空間にマークの位置を入力し、撮影範囲画像に入力されたマークの位置を、撮影領域を囲むマークの符号が合致するように結線して撮影範囲画像に撮影領域を当てはめ、撮影範囲画像において当てはめられた撮影領域をグループ分けして表示する。
(もっと読む)
スキャタロメトリ識別法を利用したオーバーレイ測定
【課題】半導体ウェーハの2つの層の間のアライメント・オーバーレイの非破壊特性決定方法を提供する。
【解決手段】波長または入射角度の関数としての1つの実施例として、入射ビームの放射は、ウェーハ表面上に向けられ、結果として得られる回折ビームの特性が決定される。スペクトル的、または角度的に分解された回折ビームは、オーバーレイ・フィーチャのアライメントと関連する。計算された回折スペクトルのライブラリは、オーバーレイ・アライメントにおける予期される変動の全ての範囲をモデル化することにより確立される。少なくとも2つの層におけるアライメント・ターゲットを有する実際のウェーハの検査により得られたスペクトルは、実際のアライメントの特性を決定するため、最も適合するもの(ベスト・フィット)を識別するように、ライブラリと比較される。比較の結果は、上流および/または下流処理制御への入力として使用される。
(もっと読む)
照明装置、計測ヘッドおよび計測装置
【課題】画像計測用および膜厚計測用のヘッドを兼用できるようにするとともに、光源からの照明光の光量の損失を抑制して、効率的な計測が行えるようにする。
【解決手段】画像計測用の第1,第2の光源からの照明光を1つに結束された出射端から出射する画像計測用ライトガイド11からの照明光は、拡散板13を介して対物レンズ17に導かれるので、第1,第2の光源の内のいずれかを選択して駆動させたときの照明ムラが拡散板13によって解消される一方、膜厚計測用ライトガイド12からの照明光は、拡散板13を介することなく、対物レンズ17に導かれるので、拡散板13による光量の損失がない。しかも、いずれのライトガイド11,12からの照明光も共通の対物レンズ17から対象物に照射できる、すなわち、対物レンズ17を共用することができる。
(もっと読む)
位置検出方法およびプログラム、並びに測定装置
【課題】画像の周辺領域におけるマークの位置をより精度良く検出する。
【解決手段】探索処理部32は、マークを含む大きさのテンプレート画像を用いて、マークが等間隔に配置されている画像の中央寄り領域を対象としたテンプレートマッチングを行い、画像の中央寄り領域に配置されている複数のマークの位置を検出する。また、推定処理部33は、画像の中央寄り領域で検出された複数のマークの配置に基づき、マークの間隔に従って、画像の周辺領域でのマークの位置を推定し、テンプレート加工部34は、所定の削除量でテンプレート画像を削除する加工を行う。そして、探索処理部32は、加工済みのテンプレート画像を用いて、推定されたマークの位置に応じた所定範囲のテンプレートマッチングを行い、画像の周辺領域に配置されているマークの位置を検出する。本発明は、例えば、シリコンウェハに形成されたマークの位置を検出する検出装置に適用できる。
(もっと読む)
反射型フォトセンサ及び画像形成装置
【課題】反射面との角度の変化による出力電圧の変動を小さくできる反射型フォトセンサ、及び、該フォトセンサを有する画像形成装置を低コストで提供する。
【解決手段】反射型フォトセンサ70のケース74に設けられた収容孔75及び収容孔76のそれぞれには、LED71及びフォトトランジスタ72が収容されている。フォトトランジスタ72は、LED71の照射光Lが表面29aで正反射された反射光Rを受光する。収容孔76の表面29a側に位置する開口部76aには、反射光規制開口部761aが設けられている。この反射光規制開口部751aには凹レンズ96が設けられている。凹レンズ96は、フォトトランジスタ72に到達した反射光Rの光路径Wが受光部としての頭部84の外径Dと同じ又は略同じになるように、反射光規制開口部761aを通過する反射光Rを発散させる形状のレンズで構成されている。
(もっと読む)
スルーホールの検査装置
【課題】エッジを抽出することなくスルーホールの位置ずれを正確に検査できるようにする。
【解決手段】パッド81のスルーホール84の形成状態を検査する場合、事前に、パッド81の座標位置やパッドRGB情報、除外RGB情報を設定しておく。そして、プリント基板8から取得された表面画像を元に、先の座標位置やパッドRGB情報、除外RGB情報を用いて検査領域9の画像を抽出する。次に、この抽出された検査領域9の画像を二値化し、その二値化マップに基づいてパッド81以外の領域についてラベリング処理を実行する。そして、検査領域9の境界部分91に接するラベリング領域92を除去し、その除去後のラベリング領域92の個数をカウントしてその個数が「1」であれば「位置ずれなし」、個数が「0」であれば「位置ずれあり」と判定する。
(もっと読む)
ロボットビジョンシステムおよび自動キャリブレーション方法
【課題】キャリブレーション作業を自動で手間をかけることなく行なうことを可能としたロボットビジョンシステムを提供することである。
【解決手段】提案するロボットビジョンシステムは、第1および第2のカメラにより構成されるステレオカメラ1と、アームを有するロボット4と、ステレオカメラ1およびロボット4を駆動し制御する制御装置2と、ステレオカメラ1の基礎行列算出に用いる基礎行列算出用冶具3をロボット4のアーム先端部に固定する機構と、を有する。
(もっと読む)
半導体ウエハの外観検査方法、及び、外観検査補助装置
【課題】 本発明は、半導体ウエハの下面の外観異常箇所が、何れの半導体素子領域に存在しているかを正確に識別することができる外観検査方法を提供することを目的とする。
【解決手段】 複数の半導体素子領域52が形成された半導体ウエハ50の下面50bの外観異常を検査する方法であって、半導体ウエハ50の下面50bに各半導体素子領域52を示す映像を投影した状態で、半導体ウエハ50の下面50bの外観異常箇所56を目視で特定する検査工程を有する外観検査方法。
(もっと読む)
露光方法及び装置、並びにデバイス製造方法
【課題】露光光の強度が大きいか又は露光時間が長い場合にも高い重ね合わせ精度を得る。
【解決手段】露光用の照明光ILでレチクルRのパターンを照明し、照明光ILでそのパターン及び投影光学系PLを介してウエハWを露光する露光方法において、空間像計測系34でレチクルRのパターンの像の位置を計測し、そのパターンの像の位置の変動量をレチクルステージRSTの温度情報から予測し、この予測結果に基づいてそのパターンの像とウエハWとの位置合わせ情報を補正する。
(もっと読む)
画像機器の校正用パターン
【課題】被測定物の測定パターンに関わらず、測定誤差を低減させることができる画像機器の校正用パターンの提供。
【解決手段】校正用パターン1は、校正用パターン1の中央に設けられる正方形状の明領域からなる中央部11と、中央部11の外側に設けられる枠状パターン12とを備える。枠状パターン12は、中央部11を中心として横方向に沿って両側に延出し、明領域、及び暗領域を交互に繰り返す横方向パターンと、中央部11を中心として縦方向に沿って両側に延出し、明領域、及び暗領域を交互に繰り返す縦方向パターンとを有している。そして、横方向パターン、及び縦方向パターンは、中央部11の横方向、及び縦方向における辺の長さに対して1/3の長さにそれぞれ設定される単位長さごとに明領域、及び暗領域を交互に繰り返している。
(もっと読む)
アレイテスト装置と、該アレイテスト装置の基板一地点位置測定方法と、カメラアセンブリーに撮像された特定位置座標測定方法
【課題】本発明は、アレイテスト装置と、アレイテスト装置の基板一地点位置測定方法と、カメラアセンブリーに撮像された特定位置座標測定方法を提供する。
【解決手段】本発明のアレイテスト装置は、テストされる基板を支持するテスト部を備える。少なくとも一つのモジュレータヘッドは、テスト部上に隣接配置され少なくともテスト部に位置した基板の不良位置を検出する。モジュレータヘッドは、固定ブロックを備える。カメラアセンブリーは、基準カメラ及び隣接カメラが一定に配されるように、固定ブロックに結合される。座標測定用モジュレータブロックは、固定ブロックに分離可能に結合され、カメラアセンブリと基板との間に位置し、カメラアセンブリを成すカメラの焦点距離に合わせて配された位置表示部材を備える。位置表示部材は、基準カメラによって撮像される基準位置マーク及び隣接カメラに撮像される少なくとも一つの対応位置マークが形成される。
(もっと読む)
アレイテスト装置及び該アレイテスト装置の基板一地点位置測定方法
【課題】本発明は、アレイテスト装置と、アレイテスト装置の基板一地点位置測定方法を提供する。
【解決手段】本発明におけるアレイテスト装置は、テスト部と、テストモジュールと、位置表示部材とを含む。テスト部は、テストされる基板を支持する。テストモジュールは、少なくとも水平移動可能に配され、テスト部に配された基板の不良位置を検出する少なくとも一つのモジュレーターヘッドを備える。位置表示部材は、テスト部の水平方向の外郭にモジュレーターヘッドの移動経路上でモジュレーターヘッドと隣接して配され、基準位置マーク及び少なくとも一つの対応位置マークが形成された位置表示部材を含む。モジュレーターヘッドは、基準カメラ及び少なくとも一つの隣接カメラが配されたカメラアセンブリーを備え、位置表示部材の基準位置マークは、基準カメラによって撮像され、対応位置マークは、隣接カメラによって撮像される。
(もっと読む)
円形の幅寸法測定装置
【課題】円形状のエッジを自動検出して円形を求め、該円形の幅寸法の測定を可能にする円形の幅寸法測定装置を提供する。
【解決手段】全体として1または2以上の層を有する円形状の物体を上方から撮像する撮像手段と、前記撮像手段によって得られた画像から前記円形状の仮中心点を求める手段と、前記仮中心点から円形の複数のエッジを求める手段と、前記円形の複数のエッジから仮想円の中心を求める手段と、前記仮想円の中心から仮想円を求める手段と、前記仮想円から検出円を求め、該検出円の幅を円形状の幅寸法とする幅寸法算出手段とを有することを特徴とする円形の幅寸法測定装置。
(もっと読む)
トナー位置検出方法、反射型光学センサ及び画像形成装置
【課題】従来よりも小さなトナーパターンで尚且つリアルタイムでのトナー位置検出を可能としたトナー位置検出方法及び反射型光学センサを提供する。
【解決手段】反射型光学センサOS1において、検出光を放射する発光部E1〜E2は副方向に交わる2方向に配置されて照射手段となる。E1とE2は副方向において平行ではない。D1〜D10は受光部を示し、BSP1、BSP2は照射スポットを示している。副方向に交わる任意の2方向に配置した照射手段E1、E2のうち1方向に配列した照射手段の検出光に対する支持部材(転写ベルト)の反射特性と、該転写ベルト上に形成されたトナーパターンDP1の反射特性との差を信号A、残りの1方向に配列した照射手段の検出光に対する上記支持部材の反射特性と上記トナーパターンの反射特性との差を信号Bとするとき、上記信号Aと信号Bとに基づいてトナーパターンの上記支持部材上における位置を演算的に検出する。
(もっと読む)
プリンタ
【課題】 メディアの間隔方向と共にメディア表面に平行な方向におけるメディアの位置情報を同一の読取器で直接検出して、プリント精度の向上と低コスト化を高いレベルで両立したプリンタの提供。
【解決手段】 メディアの表面を読み取る読取器(4)は、発光素子(41)とイメージセンサ(42)を含む。発光素子(41)からの光をメディア(3)に斜入射させ、斜入射した光の拡散反射光および正反射光を、共通のイメージセンサ(42)でそれぞれ検出して、読取器(4)に対するメディア(3)の間隔およびメディア表面に平行な方向における位置情報を検出する。
(もっと読む)
検査装置および検査方法
【課題】検査対象を撮像して検査する場合の検査の高速化を図る。
【解決手段】ラインセンサカメラ6を、液晶パネル9に対して、矢符A1に示すように正方向に移動させて液晶パネル9を撮像し、矢符B1に示すようにライン幅方向にずらし、矢符A2に示すように逆方向に移動させて液晶パネル9を撮像し、以下同様にラインセンサカメラ6を、正方向および逆方向に移動させて液晶パネル9を1ライン分ずつ撮像する。正方向に移動させて撮像した画像30と、逆方向に移動させて撮像した画像31とは、上下が反転するので、正逆方向判別部17でいずれの方向であるかを判別し、画像処理部18では、テンプレート画像19を、判別された方向に応じて、反転処理し、あるいは、反転処理することなく、マッチングを行い、更に、欠陥を検査する。
(もっと読む)
移動体位置検出システム
【課題】平面上に描いたパターンを利用して移動体の位置の検出を行う。
【解決手段】本発明の移動体位置検出システムは、表面に同一のドットパターンが配置された複数のパネルを並設することにより構成される平面と、複数のパネルのドットパターンを構成する個々のドットの基準特徴量を算出し、この基準特徴量を個々のドットの平面上における座標値と対応付けてデータベースに格納する基準特徴量格納手段と、移動体が位置する平面上の領域を予め決められた時間間隔で撮像する撮像手段と、撮像手段が取得した画像中の複数のドットから所定のドットを選択し、選択したドットの検出特徴量を算出する検出特徴量算出手段と、検出特徴量をデータベース中の所定の大きさの照合範囲の基準特徴量と照合することにより、最も一致度の高い基準特徴量を選択し、選択した基準特徴量の座標値を、平面上における移動体の現在位置として検出する特徴量照合手段とを備える。
(もっと読む)
101 - 120 / 417
[ Back to top ]