
Fターム[2F065AA14]の内容
光学的手段による測長装置 (194,290) | 測定内容 (27,691) | 位置;移動量 (12,734) | 特殊なもの (4,038) | パターン位置 (417)
Fターム[2F065AA14]に分類される特許
21 - 40 / 417
露光装置及びデバイスの製造方法
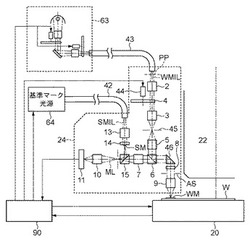
【課題】計測期間における計測部の温度安定化に有利な露光装置を提供する。
【解決手段】光源63から射出される光で前記基板の上のマークWMを照明し、前記マークで反射した光により前記マークの像を形成する光学系と、前記マークの像を検出する検出部11とを含み、前記マークの位置を計測する計測部と、前記光学系の所定面における光量を制御する制御部90と、を有し、前記マークの位置を計測しない非計測期間に前記光源から射出される光の光量は、前記マークの位置を計測する計測期間に前記光源から射出される光の光量よりも低く、前記光源と前記所定面との間の光路における透過率を前記非計測期間で、前記計測期間における透過率よりも高くすることにより、前記非計測期間と前記計測期間の前記所定面における光量の差を低減する。
(もっと読む)
塗布位置検査装置及び方法並びにプログラム

【課題】自動的に基準軌跡の抽出と許容領域の生成とを実行することができ、容易に部品形状の変更に対応することができる塗布位置検査装置を提供する。
【解決手段】シール剤Sが塗布されたワークWを撮像する撮像装置2と、撮像装置2によって撮像された撮影画像から、シール剤Sの塗布軌跡を抽出する軌跡抽出部4−1と、所定の基準軌跡を記憶する記憶部5と、軌跡抽出部4−1により抽出されたシール剤Sの塗布軌跡が、記憶装置5に記憶されている所定の基準軌跡を中心とする許容領域内に収まっているか否かを判定する形状判定部4−2とを備える。
(もっと読む)
パターン形成装置及びパターン形成方法、移動体駆動システム及び移動体駆動方法、露光装置及び露光方法、並びにデバイス製造方法
【課題】パターンが形成される物体を保持する移動体を安定して位置制御する。
【解決手段】露光装置は、ウエハを保持して所定平面内で移動するウエハステージと、所定平面内でウエハステージとは独立に移動する計測ステージと、計測ステージの位置情報を計測する干渉計システム118と、ウエハステージの位置情報を計測する、干渉計システム118に比べて計測値の短期安定性が優れるエンコーダシステム(70A〜70F)と、を備えている。このため、露光装置によると、干渉計システム118により計測ステージの位置情報が計測され、エンコーダシステム(70A〜70F)によってウエハステージWSTの位置情報が計測される。従って、パターンが形成されるウエハを保持するウエハステージを安定して位置制御することが可能となる。
(もっと読む)
液晶アレイ検査装置およびライン座標位置算出方法
【課題】表示パターンのフレームサンプリングから得られた撮像画像(シグナルイメージ)の収縮、膨張等のフレーム間の幅に不均等な部分が生じた場合であっても、各ラインの座標位置を正確に算出し、液晶パネルのピクセル位置を正確に算出する。
【解決手段】表示パターンを撮像して得られる撮像画像(シグナルイメージ)において、実検出ラインの座標位置を検出した後、次に座標位置を検出する実検出ラインを求める際に、前の実検出ラインの信号強度パターンと比較することによってラインの良・不良の検出、および、不良ラインの収縮又は膨張の判定を行い、次の実検出ラインを求める。ラインの良・不良を検出し、不良ラインの収縮・膨張の判定することによって、ライン幅にばらつきが生じた場合であっても、各ラインの座標位置を正確に算出する。
(もっと読む)
マーク検出方法及び装置、位置制御方法及び装置、露光方法及び装置、並びにデバイス製造方法
【課題】物体上の複数のマークを効率的に、かつ高精度に検出する。
【解決手段】少なくとも1軸方向に関する検出領域が互いに異なる複数のアライメント系で、少なくともその1軸方向に関して互いに異なる位置に配置されたウエハ上のマークを検出するマーク検出方法であって、複数のアライメント系の検出領域にそれぞれウエハ上のマークを移動するステップ315と、ウエハをZ方向にスキャンして複数のアライメント系の検出信号及びデフォーカス量に対応するフォーカス信号を取り込むステップ316と、複数のアライメント系の検出信号とフォーカス信号とからフォーカス信号のオフセットを求めるステップ317とを有する。
(もっと読む)
マーク検出装置およびマーク検出方法ならびに画像作成および切り抜き装置
【課題】コスト高を招来することなく、簡単な構成により、自動的にセンサーの感度を調整することができるマーク検出装置およびマーク検出方法ならびに画像作成および切り抜き装置を提供しようとする。
【解決手段】投光手段から投光された光の反射光を受光手段により受光し、受光量に応じた検出電圧を出力するセンサーを備え、上記センサーにより検出した検出電圧を基準電圧と比較することにより、媒体上に形成されたマークを検出するマーク検出装置において、上記センサーにおける基準電圧を設定することが可能であるとともに、設定した基準電圧を出力する基準電圧出力手段と、上記基準電圧出力手段より出力された基準電圧と、上記センサーに出力された検出電圧との差分を増幅して出力する電位差出力手段とを有するようにしたものである。
(もっと読む)
観察方法、露光装置、及びデバイス製造方法
【課題】液浸法で露光を行う露光装置の液体に接する部分に異常があるかどうかを効率的に判定する。
【解決手段】露光光ELで投影光学系PLと液体1とを介して基板Pを露光する露光方法において、液体1に接する接液部を光学的に観察し、得られる第1画像データを記憶する第1工程と、接液部の液体1との接触後、例えば液浸露光後に接液部を光学的に観察して第2画像データを得る第2工程と、第1画像データと第2画像データとを比較して、その観察対象部の異常の有無を判定する第3工程とを有する。
(もっと読む)
画像処理方法及び画像処理装置
【課題】種々の形状のマークの識別を可能とする。
【解決手段】電子部品Cを基板Kに実装する際に、電子部品又は基板に付されたマークMを撮像した撮像画像データによるマークの識別に用いられる画像処理方法であって、マークの撮像画像データから当該マークの中心位置を特定する中心特定工程と、マークの中心位置からマークの撮像画像データの極座標変換データを取得するデータ変換工程と、極座標変換データにおける背景とマークとの境界線の形状的特徴からマークの形状を判別する形状判別工程と備えている。
(もっと読む)
半導体装置の製造方法および半導体装置
【課題】下層および上層に形成したデバイスパターン間のズレ量を現状で実施されている方法よりも高精度に計測可能な半導体装置の製造方法および半導体装置を提供すること。
【解決手段】実施形態によれば、半導体装置の製造方法が提供される。半導体装置の製造方法は、パターン形成工程と、開口部形成工程とを含む。パターン形成工程では、第1層に位置ズレ計測用のパターン111と第1パターン101とを形成する。開口部形成工程では、前記第1層よりも上層に積層した第2層103に前記位置ズレ計測用のパターン111を露出させる開口部と第2パターン102とを形成する。
(もっと読む)
印刷装置
【課題】ステージに載置する基材のいずれの面にアライメントマークが設けられる場合であっても、1つのカメラで撮像可能な印刷装置を提供する。
【解決手段】吐出ヘッドのノズルから液体の液滴が吐出される基材1を載置するステージ37Aと、基材1の一方面側或いは他方面側のいずれかに設けられたアライメントマークMを撮像するカメラ61と、一方面側からアライメントマークMを撮像する第1の状態と、他方面側からアライメントマークMを撮像する第2の状態とを切り替え可能とするようにカメラ61の位置を制御するカメラ位置制御機構65と、を備える印刷装置に関する。
(もっと読む)
走路推定装置及びプログラム
【課題】片側車線しか検出されない場合でも、俯角を固定することなく、走路に対する撮像装置の姿勢角を含むソロパラメータを推定する。
【解決手段】特徴点抽出部20により撮像装置12で撮像された撮像画像を取得して、撮像画像から特徴点を抽出し、車線境界点選択部22により、抽出された特徴点から車線を示す車線境界点を選択し、車線境界点記憶部24に一旦記憶する。走路パラメータ推定部26により、二時刻間でヨー角及び曲率が変化しないとの仮定の下で、二時刻間の横位置の変化を速度V及びヨー角を用いて表すことで、二時刻間の走路パラメータを関係付け、二時刻の各々で選択された車線境界点群と、走路パラメータにより定まる車線境界線との最適化により、走路パラメータを推定する。
(もっと読む)
サンプル媒体上のレチクルマークを用いて、希少細胞のスキャナ画像座標を顕微鏡座標に変換する方法
【課題】物体の位置を取得する方法を提供する。
【解決手段】画像形成システムの第1座標空間が定められ、該第1座標空間における座標が指定される。第2の画像形成システムの第2座標空間が定められ、該第2座標空間における座標が指定される。第1座標空間の指定された座標を用いることにより、座標変換パラメータが計算される。その後、第1座標空間において少なくとも1つの物体の座標が指定され、該物体の第1座標空間座標が第2座標空間における独自の座標に変換される。
(もっと読む)
光学装置、スキャン方法、リソグラフィ装置及びデバイス製造方法
【課題】センサのコスト及び嵩増大、及び/又は測定の精度不良を回避又は低減する光学スキャン機構を提供する。
【解決手段】装置は、リソグラフィ基板W上のマーク202の位置を測定する。測定光学システムは、マークを放射スポットで照明する照明サブシステムと、マークによって回折した放射を検出する検出サブシステム580とを備える。傾斜ミラー562は、放射スポットを、マーク自体のスキャン運動と同期して測定光学システムの基準フレームに対して移動させて、正確な位置測定値を取得するより多くの時間を提供する。ミラー傾斜軸568は、ミラー平面と対物レンズ524の瞳面Pとの交点に沿って配置され、スキャンのアーティファクトを最小限にする。他のタイプの装置、例えば共焦顕微鏡におけるスキャンのために同じ幾何学的構成を使用できる。
(もっと読む)
拡張現実提供装置、拡張現実提供システム、拡張現実提供方法及びプログラム
【課題】少ないマーカの種類で多様なコンピュータグラフィックス画像データを重畳表示することを可能とする技術を提供することを目的とする。
【解決手段】識別情報を含む画像を撮影する撮影手段と、撮影手段により撮影された画像の画像データに含まれる識別情報を認識する認識手段と、前記識別情報と前記コンピュータグラフィックス画像データとの対応関係ルールを記憶するルール記憶手段と、認識手段により認識された識別情報に対応するコンピュータグラフィックス画像データを決定する決定手段と、決定手段により決定されたコンピュータグラフィックス画像データを現実空間の画像と合成して表示させる表示手段とを有し、認識手段により同一の識別情報が複数認識された場合、前記ルール記憶手段より同一複数の識別情報に対する対応関係ルールに基づいてコンピュータグラフィックス画像データを合成して重畳表示することによって課題を解決する。
(もっと読む)
高精度アライメント用画像収集装置とその画像収集モジュール
【解決手段】画像収集モジュール1が一個の画像取得位置に位置する時、複数個の光入力側110はそれぞれ載置台2と運び台3に向くように形成され、そして複数個の光出力側111はそれぞれ二個の画像取得ユニット12、12’に向くように形成されることにより、載置台2と運び台3の場所の光線は同時に複数個の光入力側110を経由してそれぞれ二個の光反射プリズム112a、112bに入射し、そして二個の光反射プリズム112a、112bの光反射面R1、R2に反射される光線は複数個の光出力側111を通じて上記光伝送経路に沿ってそれぞれ二個の画像取得ユニット12、12’まで到達するように構成されている。
【効果】簡単な操作の形態で物体に対して精確なアライメントを行うことにより、アライメントに必要な時間とコストを低く抑えることができ、さらに作業上の便利性を高めることができる。
(もっと読む)
部品実装装置及び部品実装方法
【課題】部品装着前の位置合わせに必要な装置誤差のデータを正確に取得して部品を高精度で基板に装着することができる部品実装装置及び部品実装方法を提供することを目的とする。
【解決手段】装着ヘッド15のツール(部品用ツール20又は治具用ツール20J)の加熱を行うヘッド側加熱ヒータH1のほか、治具部品JGが載置される治具部品載置部AR2の加熱を行う載置部側加熱ヒータH2を備え、治具部品載置部AR2の温度がヘッド側加熱ヒータH1によって加熱された治具用ツール20Jの温度とほぼ同じ温度になるように載置部側加熱ヒータH2の制御を行う。
(もっと読む)
カラー画像位置検出装置及びそれを備えたカラー画像形成装置
【課題】小型で適正なカラー画像の位置検出ができるカラー画像位置検出装置を提供する。
【解決手段】用紙12上の直交方向画像補正パターン10と斜め方向画像補正パターン11を検出するカラー画像位置検出装置であって、1つの共用緑色光源3と、それを中間にして一方側に設けられた第1の赤色光源2aと、他方側に設けられた第1の青色光源4aを用紙12の搬送方向に対して直交する方向に配置した第1の検出グループ36と、共用緑色光源3を中間にして一方側に設けられた第2の赤色光源2bと、他方側に設けられて第2の青色光源4bを用紙12の搬送方向に対して斜め方向に配置した第2の検出グループ39と、各光源からの反射光を受光する受光素子5a,5bとを1つの光源ホルダ1に設置したことを特徴とする。
(もっと読む)
カメラポーズ情報算出装置およびカメラポーズ情報算出プログラム
【課題】GPS装置や地磁気センサ等の検出装置を用いずに、カメラの位置や姿勢を示すカメラポーズ情報を算出すること。
【解決手段】メディア媒体に対応する画像領域である位置情報埋込領域をカメラ画像データから抽出し、電子透かしにおいて電子的に埋め込まれた媒体位置情報を前記位置情報埋込領域から抽出するとともに、前記メディア媒体の位置情報が示す位置と対応する当該位置情報埋込領域の位置を示す座標を示す画像座標情報を前記位置情報埋込領域から抽出する位置情報抽出手段と、前記位置情報抽出手段が抽出した前記媒体位置情報および当該媒体位置情報に対応する前記画像座標情報に基づき、前記実空間中における前記カメラの位置と姿勢を示すカメラポーズ情報を算出するカメラポーズ情報算出手段と、を備えることを特徴とする。
(もっと読む)
ラベル検査方法及び装置
【課題】容器に貼付されたラベルの良否がラベラ内で検査できるラベル検査装置を提供する。
【解決手段】自転しながら公転軌道3aを公転する容器2にラベル7を貼付するラベラ1と、ラベラ1の公転軌道3aを挟んで対向し、かつラベルの正面方向またはラベルの側面方向に設置された少なくとも一対の撮像手段12a〜12dと、撮像手段12a〜12dが撮像した容器2の画像をから容器2に貼付されたラベル7の特徴点を計測する画像計測演算手段22と、ラベル7の良否を判定する基準値が設定された良否判定基準値設定手段23と、画像計測演算手段22が計測した特徴点と基準値とを比較演算してラベル7の良否を判定する良否判定演算手段25とから構成したもので、ラベラ1内に撮像手段12a〜12dを設置するだけでよいため、既存のラベラにも容易かつ安価に実施することができる。
(もっと読む)
加工位置の計測方法
【課題】第mの加工位置と第nの加工位置とのずれを精度よく計測することのできる加工位置の計測方法の提供を目的とする。
【解決手段】加工位置の計測方法は、第mの加工を施すとともに、第mのマーク26、及び、基準寸法を示す基準マーク29を形成し(S2)、第nの加工を施すとともに、第nのマーク27を形成し(S7)と、第mのマーク26及び第nのマーク27の相対的位置を測定するとともに、測定した基準寸法L1と基準寸法L0との比にもとづいて、第mのマーク26と第nのマーク27との相対的位置を補正し、第mの加工位置と第nの加工位置との加工位置のずれを計測する(S9)方法としてある。
(もっと読む)
21 - 40 / 417
[ Back to top ]