
Fターム[2F065AA14]の内容
光学的手段による測長装置 (194,290) | 測定内容 (27,691) | 位置;移動量 (12,734) | 特殊なもの (4,038) | パターン位置 (417)
Fターム[2F065AA14]に分類される特許
41 - 60 / 417
ラベル検査方法及び装置
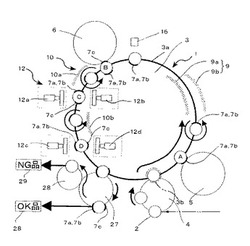
【課題】容器に貼付されたラベルの良否がラベラ内で検査できるラベル検査装置を提供する。
【解決手段】自転しながら公転軌道3aを公転する容器2にラベル7を貼付するラベラ1と、ラベラ1の公転軌道3aを挟んで対向し、かつラベルの正面方向またはラベルの側面方向に設置された少なくとも一対の撮像手段12a〜12dと、撮像手段12a〜12dが撮像した容器2の画像をから容器2に貼付されたラベル7の特徴点を計測する画像計測演算手段22と、ラベル7の良否を判定する基準値が設定された良否判定基準値設定手段23と、画像計測演算手段22が計測した特徴点と基準値とを比較演算してラベル7の良否を判定する良否判定演算手段25とから構成したもので、ラベラ1内に撮像手段12a〜12dを設置するだけでよいため、既存のラベラにも容易かつ安価に実施することができる。
(もっと読む)
画像処理装置及び画像処理方法

【課題】本発明は画像処理装置における撮影画面中の計測範囲設定の調整を容易にすることを目的とする。
【解決手段】視野内に搬送された対象物を撮像して2次元画像を得る撮像手段と、2次元画像を画面に表示する表示手段と、得られた2次元画像から対象物の輪郭を表す輪郭線を抽出する形状抽出手段と、輪郭線上の複数の点の位置を抽出する点位置抽出手段と、複数の点から2次元画像上の対象物の搬送方向における輪郭線の位置を代表する代表点の位置を決定する代表位置決定手段と、少なくとも代表点の位置と2次元画像上の対象物の搬送方向において予め設定された計測幅とに基づいて輪郭線を含む計測領域を得られた2次元画像上に設定する計測領域設定手段と、を備える。
(もっと読む)
変位計測装置
【課題】クロストークによる検出誤差を軽減し、移動体の高帯域速度変動を高精度に検出することができる変位計測装置を得る。
【解決手段】移動体に設けた光学的に識別可能なマークを照明する第1の発光部と前記マークを介した光を検出する第1の受光部とを備える第1の検出部と、前記第1の検出部に対して前記移動体の移動方向に所定の間隔を隔てて配置され、前記マークを照明する第2の発光部と前記マークを介した光を検出する第2の受光部とを備える第2の検出部と、前記第1の発光部と、前記第2の発光部を時分割で発光させる時分割発光手段と、前記マークのうち同一のマークを前記第1、第2の検出部で各々検出する第1のタイミングと前記第1のタイミングと異なる第2のタイミングを検出する検出手段と、前記検出手段で得られた前記第1のタイミング及び前記第2のタイミングを用いて前記移動体の移動速度を算出する速度算出手段と、を有する。
(もっと読む)
ひずみ測定装置およびひずみ測定方法
【課題】本発明は、所定の特徴パターンの変形を考慮しつつ測定精度の向上と情報処理量の低減とを図ることができるひずみ測定装置およびひずみ測定方法を提供する。
【解決手段】本発明のひずみ測定装置Saおよび該方法では、試験体SMに外力を作用させる前後における試験体SMの外力作用前画像Aおよび外力作用後画像Bから、パターンのマッチングによって仮伸縮率が求められ、この求めた仮伸縮率を用いて外力作用前画像Aまたは外力作用後画像Bにおけるパターンが変形され、この変形されたパターンに基づいて、試験体SMの外力作用後画像Bから、パターンのマッチングによって伸縮率が求められる。
(もっと読む)
画像情報処理装置及びその制御方法
【課題】誤った対応付けを低減すると同時に、より様々な被写体の形状に対しても三次元計測を可能とする、よりロバストな三次元計測方法を提供する。
【解決手段】複数種類の符号が二次元に並ぶ投影符号列の各符号に、符号の種類ごとに異なる色または輝度を有する点をシンボルとおして割り当てることで得られた二次元の点列を含む投影パターンを被写体に投影し、投影パターンが投影された被写体を撮像することにより得られた撮像画像を用いて被写体の三次元計測を行う画像情報処理装置は、撮像画像から点列を抽出して撮像パターンを取得し、撮像パターンの各点を対応する符号に変換して撮像符号列を取得する。装置は、複数種類のサンプリング形状から選択された一つのサンプリング形状にしたがって所定数の符号を取得し、取得した符号を並べて情報符号列を生成し、情報符号列と投影符号列の部分とを対応付けることで撮像画像中における投影パターンの投影位置を同定し、三次元計測を行う。
(もっと読む)
位置合わせ測定方法及び位置合わせ測定装置
【課題】位置合わせ測定の精度を向上する。
【解決手段】1つの実施形態によれば、位置合わせ測定方法では、測定光学系の測定領域内が2次元的に分割された複数の部分領域のそれぞれに位置合わせ測定用マークが位置するように前記位置合わせ測定用マークに対する前記測定領域の相対的な位置を順次にシフトさせながら前記位置合わせ測定用マークの位置合わせずれ量を予め測定して、前記測定光学系の特性ずれに関する装置要因誤差を前記複数の部分領域のそれぞれごとに求め、前記複数の部分領域ごとに求められた前記装置要因誤差に基づいて前記複数の部分領域のうち使用すべき部分領域を決定し、前記決定された前記使用すべき部分領域に前記位置合わせ測定用マークが位置するように前記位置合わせ測定用マークに対する前記測定領域の相対的な位置をシフトさせた状態で前記位置合わせ測定用マークの位置合わせずれ量を測定する。
(もっと読む)
光学系調整方法及び調整装置
【課題】基準面と、基準面と同一の光路内にある対象面を良好に調整できる、光学系調整方法を提供する。
【解決手段】光学系調整方法は、観察対象の像を投影する投影面、パタンが形成されたマスク、及び、マスクと観察対象との間に設置され観察対象からの光を投影面に向けて反射するハーフミラーを有する光学系のマスクの表面を観察対象の方向から撮像する調整用カメラと、光学系に対する調整用カメラの位置を調整するステージと、投影面の位置を調整する調整手段とを有する調整装置における調整方法であって、投影面が取り付けられる前に、調整用カメラに撮像されたマスクの画像を基に調整用カメラの位置を調整するステップと、投影面が取り付けられた後に、調整用カメラに撮像された投影面の位置を調整するステップと、を有することを特徴とする。
(もっと読む)
三次元位置計測装置、三次元位置計測方法、及びコンピュータプログラム
【課題】空間符号化法における物体の三次元形状の計測を高速に且つ高精度に行う。
【解決手段】それぞれのエッジの位置が相互に重ならない複数の周波数のスリット光パターンを被写体に投影したときのそれぞれの撮像画像から、スリット光パターンのエッジの部分を特定する。そして、2以上のスリット光パターンの撮像画像において、エッジの部分が重なる場合に、そのエッジに対応する位置の距離算出値の信頼度を低下させる。
(もっと読む)
溶接ビードの品質検査方法
【課題】溶接ビードの幅方向の位置ずれ量を算出するためのコストを抑えることができる溶接ビードの品質検査方法を提供する。
【解決手段】溶接ビードの品質検査方法は、床小梁との結合部分と端板の溶接ビード側端、溶接ビードの端板との結合部分にそれぞれ影ができるように光を当て、モノクロUSBCCDカメラで撮像する。得られた2つのモノクロ画像データを二値化し、端板の溶接ビード側端に相当する基準線a、溶接ビードの床小梁との結合線b、溶接ビードの端板の結合線cをそれぞれ設定する。次に、双方の結合線b、cの間に中間線dを設定し、基準線aから仮想溶接線eを設定する。そして、仮想溶接線eの垂直方向Yの位置に対する中間線dの垂直方向Yの位置のずれ量Yaを算出する。
(もっと読む)
実装精度検査方法及びその検査方法を用いる検査装置
【課題】表示パネルと光学手段との相対的な位置精度を低コストかつ高速に検出できる、実装精度検査方法及びその検査方法を用いる検査装置を提供する。
【解決手段】検査対象となる表示装置は、複数の画素群が配列された表示パネルと、画素群から複数のN(Nは2以上の自然数)視点に向けた画像表示を提供するための光学手段と有する。検査装置は、視点毎に異なる画像信号を有する検査パターンを表示装置に出力する画像出力手段と、表示装置から表示された検査画像の境界線分の傾きと位置を抽出する抽出手段とを備え、抽出手段が抽出した傾きと位置に基づいて表示パネルと光学手段との位置精度を検出する。
(もっと読む)
検出条件最適化方法、プログラム作成方法、並びに露光装置及びマーク検出装置
【課題】アライメントマークの検出条件を最適化する。
【解決手段】アライメント検出系を用いてウエハ上に形成されたアライメントマーク(EGAマーク又はサーチマーク)が複数の照明条件及び結像条件で検出される。しかる後、得られた検出信号を信号処理アルゴリズムを用いて解析処理し、検出信号の波形の形状に関する判定量が求められ(ステップ302〜310)、その判定量に基づいて複数のマークの検出結果の再現性が評価される(ステップ312)。そして、その解析結果に基づいて複数の照明条件及び結像条件が最適化される(ステップ314)。これにより、検出結果の再現性を向上するようにアライメントマークの検出条件を最適化することが可能になる。
(もっと読む)
画像検査方法および画像検査装置
【課題】所定の繰り返しピッチで連続して生産される部品の画像検査において,その画像検査の実施状態を知ることが可能となる技術を提供する。
【解決手段】画像検査装置10において,マッチング処理部141は,入力された検査画像のフレームから部品を検出し,検出された部品の位置と相関値とを取得する。フレーム間部品対応検出部151は,連続する2つのフレーム間で類似する部品の対応を検出する。対応部品位置差分算出部152は,対応部品間の検出位置の差分である対応部品位置差分を算出する。対応部品位置差分統計部153は,対応部品位置差分を統計した移動量ヒストグラムを作成する。部品移動量推定部155は,移動量ヒストグラムから連続するフレーム間での部品の移動量を推定する。画像検査実施状態判定部150は,部品の移動量の推定結果から,画像検査が適切に実施されているか否かを判定する。
(もっと読む)
散乱計測を用いてオーバレイ誤差を検出する装置および方法
【課題】複数レイヤ試料の2つのレイヤ間のオーバレイ誤差を決定する方法を提供する。
【解決手段】試料の第1レイヤから形成される第1構造および第2レイヤから形成される第2構造をそれぞれ有する複数の周期的ターゲットについて、光学システムを用い、周期的ターゲットのそれぞれについて光学信号が計測される。第1および第2構造の間には既定義されたオフセットが存在する。散乱計測オーバレイ技術を用いて既定義されたオフセットに基づいて周期的ターゲットからの前記計測された光学信号を分析することによって第1および第2構造間のオーバレイ誤差が決定される。本光学システムは、反射計、偏光計、画像化、干渉計、および/または走査角システムのうちの任意の1つ以上を備える。
(もっと読む)
像面位置計測方法、露光方法、及びデバイス製造方法
【課題】投影光学系の像面位置を精度高く計測すること。
【解決手段】基板の露光量をラインパターンのレジスト像が解像する露光量以上になる大きさ、換言すれば、ラインパターンのレジスト像のコントラスト値が所定値以上になる大きさに制御する。また、フォーカス位置を変化させた際にパターン倒れが発生しない大きさ以上の線幅を有するラインパターンを使用してベストフォーカス位置を算出する。これにより、デフォーカスによってパターン倒れが発生することを抑制しつつ、算出されるベストフォーカス位置の露光量依存性を無視することができるので、投影光学系の像面位置を精度高く計測することができる。
(もっと読む)
カメラのキャリブレーション方法
【課題】人手によるミスの排除、処理時間の短縮、精度の向上を図る。
【解決手段】市松模様のチェックパターン4Aの中心部のマス目に基準マーク4Bを設けてキャリブレーションパターン4とする。基準マーク4Bが入るようにキャリブレーションパターン4を少なくとも3方向から撮影する。画像処理装置5は、自動的に、撮像されたキャリブレーションパターン4のそれぞれにおいて、任意の四角形を形成するように任意のマス目の交点座標を検出し、この検出された交点座標に基づいて各マス目の交点候補位置を算出し、算出した交点候補位置から各マス目の交点座標を推定し、推定した各マス目の交点座標に基づいて、基準マーク4Bの位置を座標基準として、撮像されたキャリブレーションパターン4と実際のキャリブレーションパターン4との間のH行列の本行列を算出し、これら算出した本行列からキャリブレーションパラメータを算出する。
(もっと読む)
ワーク識別装置
【課題】 コンベアに投入される多品種のワークを誤りなく識別するための識別装置及び識別方法の提供。
【解決手段】 本発明の識別装置は、ワーク(4A)の表面までの距離を計測する計測装置(8A)と、その計測装置(8A)をワーク(4A)の長手方向に移動させる移動装置(10A)と、これらを制御する制御装置(14A)とを有しており、前記ワーク(4A)には所定領域に種類を判別するため浮き出し文字(22A)が印字されており、前記制御装置(14A)は、計測装置(8A)を移動装置(10A)により移動させながらワーク(4A)表面までの距離を計測し、計測装置(8A)で計測されたワーク(4A)の所定領域における浮き出し文字(22A)による隆起の有無とその位置及び形状を特定し仕様の照合を行って種類・仕様の判断をする制御機能を有する。
(もっと読む)
基板検査装置
【課題】オフセット量を正確かつ容易に取得する。
【解決手段】第1の位置情報に基づいて特定される位置Ob上にビーム照射部が位置するように移動させた後に、照射部をX方向(矢印A1,A2の向き)に移動させながらレーザービームを照射させたときのレーザービームの反射光量の変化、およびY方向(矢印B1,B2の向き)に移動させながら照射させたときの反射光量の変化に基づいてマーク21の位置Mx1,Mx2,My1,My2を取得すると共に、位置Mx1,Mx2,My1,My2と、第2の位置情報とに基づいて基板保持機構によって保持されているオフセット量取得用基板におけるマーク21の位置Mbを特定し、位置Mb,ObのX方向に沿った位置ずれ量Xb、およびY方向に沿った位置ずれ量Ybを、照射部のX方向に沿った移動量、およびY方向に沿った移動量をそれぞれ補正するためのオフセット量として特定する。
(もっと読む)
長寸法測定装置
【課題】使い勝手の良い長寸法測定装置を提供すること。
【解決手段】長寸法測定装置1は、試料2が載置し、配置位置が固定されている試料台10と、試料2に形成されたパターンに照明光を照射する照明ユニット20と、照明光から得られたパターンの像を撮像する撮像ユニット30と、試料台10の平面度を調整し試料台10を支持する平面度調整機構12と、エアを試料台10に送気し、試料台10からエアを吸引する送気吸引部16と、試料台10にて浮上している試料2に吸着する吸着機構40と、撮像ユニット30をZ方向に移動させるZステージ51と、撮像ユニット30をX方向に移動させるXステージ52と、吸着機構40を介して試料2をY方向に移動させるYステージ53と、試料2に形成されたパターン上の2点間の距離を測定する干渉測定ユニット60とを具備している。
(もっと読む)
電気機器の製造方法およびそれに用いられるターゲット設置用治具
【課題】電気機器を構成する構造物を精度良く3次元測定することにより、電気機器の組立を簡易にする。
【解決手段】構造部品の外形の寸法基準となる複数の位置にターゲットを設置する工程(S102)と、ターゲットの位置を画像解析することにより構造部品の形成寸法を3次元測定する工程(S103)とを備えている。また、構造部品の形成寸法の3次元測定結果に基づいて付設部品を形成する工程(S104)と、構造部品に付設部品を取付ける工程(S106)とを備えている。ターゲットを設置する工程(S102)は、上記複数の位置のうちターゲットを直接設置することができない設置不能箇所について、構造部品にターゲット設置用治具を取付けることにより上記設置不能箇所に対応した位置にターゲットを設置する工程を含む。
(もっと読む)
基板加工およびアライメント
【課題】基板の加工領域の位置に関する位置情報をアライメントマークに関連させて取り出し、アライメントと実際の加工とを切り離して基板を効率的に製造する方法を提供する。
【解決手段】基板(5;42)は、基板(5;42)に対して固定されたアライメントマーク(6a、6b;12a…d;44a…c)が設けられ、基板(5;42)を加工する前に、基板(5;42)の加工領域の位置に関する位置情報がアライメントマーク(6a、6b;12a…d;44a…c)に関連させて取り出された場合に、アライメントと実際の加工とを切り離すことによって効率よく製造することができる。この場合に、アライメントは、加工時にアライメントマーク(6a、6b;12a…d;44a…c)の位置を1回だけ再測定し、加工領域の位置に関する保存された位置情報を使用することにより行うことができる。
(もっと読む)
41 - 60 / 417
[ Back to top ]