
Fターム[2F065AA14]の内容
光学的手段による測長装置 (194,290) | 測定内容 (27,691) | 位置;移動量 (12,734) | 特殊なもの (4,038) | パターン位置 (417)
Fターム[2F065AA14]に分類される特許
61 - 80 / 417
移動体とその旋回半径算出方法

【課題】取付けられる搬送台車によって旋回半径が異なっても、目標地点に到達可能な移動体と搬送台車が取付けられた状態の移動体の旋回半径算出方法を提供する。
【解決手段】搬送台車19が固定される台車取付部20及び駆動車輪12を備え、その場旋回が可能な車両本体11と、車両本体11に装着され、車両本体11から視認できる外環境を撮像するカメラ22と、カメラ22を介して得られる画像中での、車両本体11の旋回前後の特定の被写体の位置から車両本体11の旋回角度θを検知する旋回角度検出手段35と、搬送台車19を固定した車両本体11が旋回角度θ旋回した際のカメラ22の移動距離Dを旋回角度θで除算して、搬送台車19を固定した車両本体11の旋回半径Rを算出する旋回半径算出手段33とを有する。
(もっと読む)
区画線検出装置および区画線検出方法

【課題】電磁波を送受信した結果に基づき区画線の検出を行う装置において、検出精度を向上させる。
【解決手段】近距離スキャンの1ライン分の測定データ(強度データ,距離データ,スキャン角度)を読み込み、読み込んだ強度データ列および距離データ列のそれぞれを微分することで、微分強度データ列および微分距離データ列を求める(S110〜S120)。微分強度データ列において正レベル,負レベルが連続し且つヌルレベルに挟まれた領域を候補範囲として抽出し(S130)、その抽出した候補範囲の中から、微分距離データ列の極性が、候補範囲に対応する部位で正,負,正(第1スキャン領域の場合)、又は負,正,負(第1スキャン領域の場合)と変化するものを、区画線からの反射が得られた対象領域として抽出する(S140)。
(もっと読む)
移動体位置検出システムおよび方法
【課題】撮像した画像が照合用のデータベースにない場合でも位置検出を円滑に継続できる移動体位置検出システムおよび方法を提供する。
【解決手段】平面12上を移動する移動体16の位置を検出する移動体位置検出システム10であって、平面12上に配置された複数のドットからなるドットパターン14と、移動体16に備えられ、移動体16が位置する平面12上の領域を撮像する撮像手段20と、撮像手段20が時間的に連続して取得した2画像中に共通して含まれるドットパターンの位置関係に基づいて、2画像間の位置および方向関係を求め、移動体16の現在位置および方向を推定する推定手段28と、を備えるようにする。
(もっと読む)
画像処理装置
【課題】従来の2次元画像処理装置と同様に、利用可能な処理項目を提示して3次元計測の処理のシーケンスを作成させるユーザインタフェースを持つ画像処理装置を提供する。
【解決手段】2次元画像処理の複数の項目、および3次元計測処理の少なくとも1つの項目が登録された画像処理装置において、ユーザによる処理項目の選択に応じて2つの画像A0,A1を用いた処理のシーケンスを設定して実行する。2次元画像処理の項目には、画像A0に対し、あらかじめ登録されたモデル画像との一致の程度が高い領域71の代表位置を特定する処理項目が含まれる。この処理項目を含むシーケンスに組み込まれる3次元計測用の項目は、画像A1に対し、上記のモデル画像との一致の程度が高い領域81の代表位置を特定する処理と、各領域71,81の代表位置を用いて3次元計測用の演算処理を実行する処理とを実行するように設計される。
(もっと読む)
部品実装機の撮像画像処理装置
【課題】部品実装機に搭載したカメラのレンズ歪みを補正する処理の演算負荷を軽減する。
【解決手段】予めドットマーク12をマトリクス状に設けたレンズ歪み補正治具11を部品実装機のコンベアに載せてその上方からカメラでレンズ歪み補正治具11を撮像し、その画像処理により得られたレンズ歪み補正治具11の各ドットマーク12の認識位置と理論位置との差を算出し、その差を画像の各ドットマーク12の位置における歪み量として記憶媒体に記憶しておく。その後、部品実装機の稼働中にコンベアに載せられた部品実装基板をその上方からカメラで撮像し、その画像処理により得られた該部品実装基板の認識対象部位の認識位置を、前記記憶媒体から読み出した該認識対象部位に対応するドットマーク位置における歪み量で補正することで、レンズ歪み補正した認識位置を取得する。
(もっと読む)
顕微鏡装置及び観察位置再現方法
【課題】円形標本の観察位置を高精度に再現する。
【解決手段】顕微鏡装置は、円形標本103の撮像画像に基づいて当該円形標本103の中心位置の座標を算出する中心位置算出部201と、円形標本103の撮像画像から、当該円形標本103の中心位置の座標に基づいて所定領域のパターン画像を認識するパターン認識部202と、第1の期間に得られた円形標本103の撮像画像からパターン認識部202により認識された第1のパターン画像と第1の期間よりも後の第2の期間に得られた円形標本103の撮像画像からパターン認識部202により認識された第2のパターン画像との間の回転ずれ角を算出する回転ずれ角算出部204と、回転ずれ角に基づいて円形標本103の回転ずれを補正し、第1の期間における円形標本103の位置を再現する位置再現部205とを備える。
(もっと読む)
パターン化された構造を測定するための方法およびシステム
パターン化された構造の少なくとも1つのパラメータの測定で使用するための方法およびシステムが提供される。方法は:構造の異なる位置上の測定に対応する複数の測定された信号を含む測定されたデータと、理論的信号と測定された信号との間の関係は、構造の少なくとも1つのパラメータを示す理論的信号を示すデータとを含む入力データを提供する過程と;構造の少なくとも1つの性質を特徴付ける少なくとも1つの選択されたグローバルパラメータに基づきペナルティ関数を提供する過程と;フィッティングプロシージャの前記実行は、理論的信号と測定された信号との間の最適化された関係を決定するために前記ペナルティ関数を使用することと、構造の前記少なくとも1つのパラメータを決定するために最適化された関係を使用することとを含む、理論的信号と測定された信号との間のフィッティングプロシージャを実行する過程と;からなる。 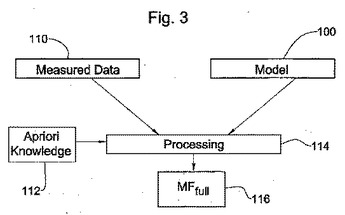 (もっと読む)
(もっと読む)
位置ずれ量測定方法、光学装置調整方法、情報記憶媒体、および位置ずれ量測定装置
【課題】情報記憶媒体に対する、記録再生を行う際の、2次元像の歪みによる位置ずれ量を測定する方法を確立し、2次元像の歪みの原因となる、光学系装置の調整方法を確立することで、記録情報の復号エラーの低減を実現する。
【解決手段】2次元情報の像と撮像素子との位置合わせの基準となる、規則的に配置された複数個の特定パターンとしてのSYNCマーク32と、隣り合うSYNCマーク32の各配置の中間点に、位置ずれ検出用マーク39とを有する、2次元情報としてのページデータ30において、SYNCマーク32の位置と、位置ずれ検出用マーク39の位置との距離について、撮像素子上の実際の2次元像での前記距離と、本来の歪みのない2次元像での前記距離との差を、位置ずれ量として測定する。上記測定された位置ずれ量を基に、2次元像の歪みの原因となる光学系装置を調整することにより、2次元像の歪みを的確に抑えることが可能となる。
(もっと読む)
撮像用パターン
【課題】拡大して撮像した場合であっても基準線に位置決めパターンを容易に合わせることができる撮像用パターンの提供。
【解決手段】撮像用パターン1は、画像機器に撮像される際に、2本の基準線L1,L2に合わせることによって、画像機器に対する位置決めをするための位置決め用パターン13を備えている。位置決め用パターン13は、撮像用パターン1の中心から縦横方向に沿って所定の間隔で複数の図形を配置したパターンとして構成されている。具体的に、各図形は、直角三角形状の暗領域とされ、各図形のうち、縦方向に沿って設けられる各図形は、縦方向に平行な辺13Aを一辺のみ有する図形とされ、横方向に沿って設けられる各図形は、横方向に平行な辺13Bを一辺のみ有する図形とされている。また、各辺13A,13Bの延長線は、撮像用パターン1の中心を通っている。
(もっと読む)
顔向き検知装置
【課題】ひとの顔の左右の顔端位置を精度良く検出し、顔向き方向の検知精度を向上させる。
【解決手段】顔向き検知装置10は、乗員カメラ12から出力された顔画像に基づき運転者の顔中心位置を検出する顔中心位置検出部22と、顔画像において運転者の顔を横断する複数の探索線を設定する探索線設定部23と、探索線設定部23により設定された複数の探索線に基づき複数の顔端位置を検出する顔端位置検出部24と、顔端位置検出部24により検出された複数の顔端位置毎に、顔中心位置検出部22により検出された顔中心位置に基づき、顔向き方向を検知し、複数の顔向き方向の中央値を運転者の顔向き方向として検知する顔中心位置検出部22とを備える。
(もっと読む)
位置検出装置及び方法、露光装置、デバイス製造方法
【課題】半導体製造装置のマーク検出率を向上させる。
【解決手段】検出マークの位置を検出する位置検出方法は、検出マークのエッジ位置を特定するためのテンプレートを保持し、検出マークを含む画像に対して、テンプレートを用いたマッチング処理を実行する。ここで、テンプレートにおいて、同一の方向を向くエッジに対応する全てのエッジ位置を当該方向またはその反対方向へ移動することにより当該テンプレートを変更し、上記マッチング処理において算出される相関度が予め定められた判定閾値外の場合に、上記方法でテンプレートを変更しながらマッチング処理を繰り返し、マッチング処理の結果に基づいて位置検出を行う。
(もっと読む)
画像情報検出装置
【課題】 構成素子の配置誤差や画像情報検出装置自体の配置誤差に対して、パターンの検出位置精度が鈍感となる画像情報検出装置を提供すること。
【解決手段】 複数の感光ドラムを有するカラー画像形成装置の画像の重なりずれを検出する画像情報検出装置は、四角形の発光面を有する光源と、所定の方向に移動する像担持体と、四角形の受光面を有する受光手段と、前記光源の発光面と前記像担持体を共役関係にし、前記光源から出射された光束を前記像担持体上に形成された重なりずれ検出パターンに照射する照明光学系と、前記像担持体と前記受光手段の受光面を共役関係にし、前記重なりずれ検出パターンにて反射された光束を前記受光手段に導光する受光光学系と、を有し、前記発光面の前記像担持体上における共役像の輪郭を形成する発光面共役像直線部と前記受光面の前記像担持体上における共役像の輪郭を形成する受光面共役像直線部は平行である。
(もっと読む)
情報処理装置、情報処理方法及びプログラム
【課題】凸凹が著しい領域、細長い領域等、縦横に十分な平面の大きさが得られない条件下でパターンを正しく検出することを目的とする。
【解決手段】撮像手段で撮像された、パターン光投影手段によって、少なくとも2つの方向を持ち、各方向に少なくとも二本以上の線を持つ線パターンと、被写体上に一部領域、又は全領域が投影され、線パターンの基準となる一つ以上の基準線パターンと、を含むパターン光が投影された被写体の撮像画像より基準線パターンを検出する基準線パターン検出手段と、基準線パターン検出手段で検出された基準線パターンから、位相幾何学的な位置関係によって、パターン光投影手段によって投影された線パターンと、撮像手段で撮像された線パターンと、の対応付けを行う線パターン対応手段と、を有することによって課題を解決する。
(もっと読む)
インプリントリソグラフィ
オブジェクトと別のオブジェクトとの相互アライメントに用いる特定のアライメント構成を備えたオブジェクトが開示される。アライメント構成は、実質的に規則的な格子の形態の第1の微細アライメントマークと、第1のアライメントマークと同じエリア内に位置する第2の粗アライメントマークとを含む。 (もっと読む)
車両位置検出装置、車両位置検出方法、及び車両位置検出プログラム
【課題】広角画像を用いて行う、車線に対する車両の位置関係の検出の精度を良くする。
【解決手段】白線部分画像領域抽出処理S110は、道路を走行中の車両の走行方向に対する側方の方向を撮像した側方画像から、第一部分画像領域及び第二部分画像領域を抽出する。この2つの部分画像領域は、道路の路面上に描かれており当該車両が走行している車線の境界を表している白線の破線において当該破線の空線部分を挟み込んでいる白線部分が各々に映っている領域である。推定処理S112は、第一部分画像領域に映っている第一白線と第二部分画像領域に映っている第二白線とを滑らかに結ぶ推定線を側方画像上に推定する。この推定は、側方画像上での第一白線及び第二白線の各々についての線端の位置及び当該線端での向きに基づいて行われる。位置関係検出処理S113は、この推定線の側方画像上での位置に基づき、車線に対する車両の位置関係を検出する。
(もっと読む)
立体形状測定システム及び立体形状測定方法
【課題】対象物体に動きがある場合であっても測定精度の低下を抑止すること。
【解決手段】投影装置がそれぞれ異なる第一〜第三模様を物体に対して投影する状態で繰り返し遷移し、撮像装置が第一〜第三模様が投影された物体の画像をそれぞれ生成し、立体形状測定装置が各画像において、各ピクセルの輝度値の時間変化を表す波形の位相をピクセル毎に算出し、異なる撮像装置によって撮像された各画像において、各ピクセルの輝度値及び位相に基づいて、物体の三次元空間上の同一点が撮像された画像平面上のピクセルの対応付けを行い、各対応点の画像上の座標に基づいて物体の立体形状を測定する。
(もっと読む)
GPUを使用したアイトラッキング
【課題】視覚ディスプレイを見ている眼球のアイトラッキングを改善する。
【解決手段】表示信号により制御可能な視覚ディスプレイを見ている眼球の注視ポイントを決定する方法であって、視覚ディスプレイにスクリーンパターンを生成するために、グラフィックスカードを使用して表示信号を生成することと、スクリーンパターンの角膜−強膜反射を含む眼球の画像を符号化する信号を受信することと、スクリーンパターンの角膜−強膜の反射のジオメトリの一部に基づいて、眼球の注視ポイントを決定することと、を具備し、注視ポイントを決定することは、並列プロセッサとしてグラフィックスカードを利用することを含む。さらに、ビューアの注視ポイントを決定するように構成された注視トラッキングシステム及びパーソナルコンピュータシステムが提供される。
(もっと読む)
検査装置及び検査方法
【課題】表面に膜が形成されたウエハでも安定してアライメントマークと周辺部のコントラストが高い画像データを取得できるようにしたものを提供する。
【解決手段】照明光となる光源と前記光源からの光を物体に照射し、また反射光を集光結像する結像光学系と前記結像光学系の集光点に設置し、物体の画像を取り込むカメラと取り込んだ画像を処理する画像処理機能からなるアライメント測定装置を備えた欠陥検査装置において、画像の取り込みを少なくとも2つの異なる波長帯域の反射光において行い、それぞれの反射光に対応した物体の画像情報を適切に演算処理することによってアライメントマークのコントラストを高めるように構成する。
(もっと読む)
リソグラフィ装置及びデバイス製造方法
【課題】リソグラフィ装置の処理能力を大きく損なうことなく、重ね合わせ精度を向上させる方法及び装置を提供する。
【解決手段】露光条件を最適化するために基板の露光時に基板上の位置合わせ標識を検査する。基板10が露光及び位置合わせユニット15の真下で走査を受けるとき、基板のそれぞれの部分が最初に検出器ユニット16の下方を通過し、次いで露光ユニット17の下方を通過する。したがって、基板10のそれぞれの部分に関して検査器ユニット16によって測定された、直線位置、配向、及び膨張に関する情報が露光ユニット17に伝達可能であり、基板が露光ユニット17の真下を通過しながら基板が露光されるとき、基板の当該部分に関する露光条件を最適化することができる。
(もっと読む)
反射型光学センサ、反射型光学センサアレイおよび画像形成装置
【課題】トナーパタンの位置およびトナー濃度の少なくとも一方を検出する反射型光学センサを実現する。
【解決手段】半導体発光素子EiとフォトダイオードDiを、半導体発光素子の発光軸とフォトダイオードの受光軸とが平行となるようにし、発光軸および受光軸が間隔:Lとなるように相互に近接して配置一体化した一体型発光受光素子と、半導体発光素子から担持媒体2040表面に照射される光束に、収束作用を及ぼす照明用集光レンズLEiとを有し、照明用集光レンズは光軸を発光軸と平行にしてフォトダイオード側へシフトし、半導体発光素子から発光軸上に放射される光線が、照明用集光レンズにより屈折されて、発光軸に直交する担持媒体表面に入射角:Θをもって斜め入射し、担持媒体表面により正反射されてフォトダイオードの受光部の中心部に入射するように半導体発光素子とフォトダイオードと照明用集光レンズとの位置関係が調整され、間隔:Lが1mm程度より小さく、入射角:Θが10度より小さくなるように設定されている反射型光学センサ。
(もっと読む)
61 - 80 / 417
[ Back to top ]