
Fターム[2F065AA17]の内容
光学的手段による測長装置 (194,290) | 測定内容 (27,691) | 位置;移動量 (12,734) | 特殊なもの (4,038) | 中心位置;物体の重心 (839)
Fターム[2F065AA17]に分類される特許
1 - 20 / 839
三次元計測方法、三次元計測装置及び三次元計測プログラム
薄膜形成装置及び薄膜形成方法
アライメント方法およびパターン形成方法
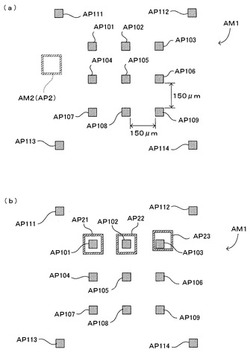
【課題】2つの基板のそれぞれに形成されたアライメントマークの両方に同時にピントを合わせることができない場合であっても、それらの位置合わせを高精度に行うことを可能にする。
【解決手段】パターンを転写される基板に形成されるアライメントマークAM1は、正方形の中実図形であるアライメントパターンAP101〜AP109、AP111〜AP114を配列してなるものとする。一方、基板に転写すべきパターンを担持するブランケットには、アライメントマークAM2として、環状の中空矩形のアライメントパターンAP2をパターンと同じ材料で形成する。アライメントマークAM1は、低い空間周波数成分をアライメントパターンAP2よりも多く含むパターンにより構成されており、ピントが合わない状態で撮像された場合でも重心位置を精度よく検出することが可能である。
(もっと読む)
転写装置、アライメント方法および転写方法

【課題】担持体および基板のそれぞれに形成されたアライメントマークの両方に同時に撮像手段のピントを合わせることができない場合であっても、担持体と基板との位置合わせを高精度に行う。
【解決手段】透明なブランケットを介してCCDカメラで撮像された画像IMから、基板側のアライメントパターンAP1およびブランケット側のアライメントパターンAP2それぞれの重心位置G1mおよびG2mを画像処理により求める。ブランケット側のアライメントパターンAP2については、ピントが合った状態で撮像された画像からエッジ抽出を伴う処理により重心G2mの位置を特定する。ピントが合わず輪郭がぼやけた状態で撮像された基板側のアライメントパターンAP1については、高い空間周波数成分を除去して低周波成分を抽出し、その結果から重心G1mの位置を特定する。
(もっと読む)
変位測定方法および変位測定装置
【課題】特異な輝度を持つ画素に影響されない重心位置算出を行い、変位測定の精度を向上する変位測定方法および変位測定装置を得る。
【解決手段】計測対象1にスリット光3を照射するスリット光照射装置2と、スリット光3を計測対象1に照射することによって生成される光切断線4を撮影するカメラ5と、カメラ5により得られた光切断線像から計測対象1の変位を求める画像処理装置7と、を備え、画像処理装置7は、カメラ5により得られた光切断線像の重心位置演算方向の各画素の輝度を最小二乗法で理想的な輝度分布に近似させた後、さらに輝度値と近似値の差分を用いて重み付き最小二乗法で理想的な輝度分布に再近似させ、その分布の期待値から光切断線像の重心位置を算出して計測対象1の変位を求める。
(もっと読む)
コークス炉移動機の位置調整方法及び装置
【課題】コークガイド車などの移動体の移動路に沿って設けられた目標体とコークス炉の位置関係に誤差が生じても移動機を簡易に目標とする位置にする。
【解決手段】コークガイド車1の移動路に沿って設けられた目標体9を検出し、目標体検出装置4で目標体9を検出したときのコークガイド車1の規定位置に対し、目標位置検出装置5で目標位置を検出しながら規定位置から目標位置までコークガイド車1を移動し、検出された目標位置と規定位置との位置誤差を記憶し、以降、目標体9を検出した位置から記憶された位置誤差分だけ移動してコークガイド車1を目標位置にすることにより、目標体9とコークス炉7の位置関係に誤差が生じても、一度、目標体9を検出したときの規定位置と目標位置との位置誤差を記憶してしまえば、以降はコークガイド車1を簡易に目標とする位置にすることができる。
(もっと読む)
管の内面曲がり測定装置およびそれを用いた測定方法
【課題】管の内面曲がりを定量的に測定できるとともに、様々な内径の鋼管に対応できる管の内面曲がり測定装置およびそれを用いた測定方法を提供する。
【解決手段】被測定材である管の長手方向に移動可能なヘッド21と、ヘッド21によって管10の周方向に揺動可能に支持され、管10の内面までの距離を測定する第1距離計22と、管10の長手方向におけるヘッド21の位置を測定する第2距離計(図示なし)と、ヘッド21の移動および第1距離計22の揺動を制御する制御手段とを備えることを特徴とする管の内面曲がり測定装置20である。本発明では、内面曲がり測定装置20が管10の長手方向に垂直な面におけるヘッド21の変位を測定する変位計を備え、ヘッド21を、管10を長手方向を水平にした状態で該管の内面上を走行する走行機構、および、第1距離計22の揺動軸を水平に維持する維持機構を有する走行装置に設けるのが好ましい。
(もっと読む)
三次元測定対象物の形態調査方法
【課題】レーザー走査装置により三次元測定対象物の形態を正しく測量し、調査する。
【解決手段】三次元測定対象物の形態調査方法であって、レーザー走査装置が調査範囲にレーザーを照射したとき、該レーザーの多数の反射点の各点を、三次元座標化された点として取得し、前記調査範囲の水平面上に多数のグリッドを派生させ、各グリッドの中にある点群の鉛直座標分布から標高値の最も低い低位点を抽出し、各グリッドで抽出された低位点を用いて調査範囲の地形モデルを作成する。
(もっと読む)
乾式ガスホルダーのピストンの監視方法および監視装置
【課題】ピストンの傾斜のみならず偏心も監視することにある。
【解決手段】内部にガスを収容するために上下方向へ延在する筒状のホルダー本体と、そのホルダー本体内に昇降可能に配置された落し蓋状のピストンと、そのピストンの周縁部とホルダー本体の内周面との間の隙間を気密にシールするシール機構とを具える乾式ガスホルダーの、前記ピストンの監視方法において、前記ピストンの中心から等距離なそのピストン上の少なくとも3箇所の位置にそれぞれピストンの上面から所定高さ突出した所定の大きさの偏心量測定テーブルを設け、前記ホルダー本体の上端部に、前記偏心量測定テーブルまでの高さ方向距離を非接触で計測する距離計を設け、前記距離計で計測した当該距離計から前記少なくとも3箇所の偏心量測定テーブルまでの高さ方向距離に変化が生じた場合に、その変化が急激な場合は前記ピストンに偏心が生じたと判断し、その変化が穏やかな場合は前記ピストンに傾斜が生じたと判断することを特徴とするものである。
(もっと読む)
画像処理方法
【課題】予め基準となる画像データを保持する必要がなく且つ簡易に、光軸と穴の中心軸との位置ずれを補正して、パノラマ展開画像に変換することが可能な画像処理方法を提供する。
【解決手段】環状画像から内円及び外円を抽出する工程と、抽出した内円及び外円の中心をそれぞれ求める工程と、極座標変換する際に基準となる展開中心を、内円中心と外円中心との間で順次移動させながらパノラマ展開画像に変換する工程とを備える。これにより、全方位撮像装置10により穴Hの側壁面を撮像した環状画像をパノラマ展開画像に極座標変換する際に、全方位撮像装置10の光軸L1と穴Hの中心軸L2との位置ずれに起因する歪みを補正することができる。
(もっと読む)
フレーム部材用検査治具、フレーム部材用検査装置及びフレーム部材用検査方法
【課題】廉価な測定装置を使用するとともに、測定方向が異なる種々の被検査部位を、同一方向から容易且つ正確に測定することを可能にする。
【解決手段】フレーム部材用検査装置10は、フレーム部材12に設けられる被検査部位の位置を測定し、前記測定された位置の精度を検査する。この検査装置10は、フレーム部材12を所定の姿勢に保持する保持機構50と、前記フレーム部材12の被検査部位に直接装着されるとともに、前記被検査部位に対応し且つ前記フレーム部材12の横方向に向かう計測孔部86が設けられる検査治具52と、前記計測孔部86を測定して算出される該計測孔部86の位置情報に基づいて、前記被検査部位の位置精度を検出する測定機構56L、56Rとを備えている。
(もっと読む)
キャリブレーション方法および映像表示装置
【課題】テレビジョン装置に固定されたカメラのキャリブレーションを行い易いキャリブレーション方法および映像表示装置を提供することである。
【解決手段】実施形態のキャリブレーション方法は、カメラおよび第1ディスプレイを備える映像表示装置のカメラ映像を補正するキャリブレーション方法であって、設置工程と、第1表示工程と、反射工程と、撮像工程と、算出工程と、補正工程とを含む。設置工程では、前記第1ディスプレイと、第2ディスプレイとを対向させて設置する。第1表示工程では、前記第1ディスプレイに所定の表示画像を表示させる。反射工程では、前記第1ディスプレイ上の表示画像を前記第2ディスプレイの表面で反射させる。撮像工程では、前記第2ディスプレイで反射された前記表示画像を前記カメラによって撮像する。算出工程では、カメラ映像における前記表示画像の位置のずれから、前記カメラと前記第1ディスプレイとの相対的位置関係を算出する。補正工程では、前記相対的位置関係に基づいて前記カメラ映像を補正する。
(もっと読む)
熱画像データ保存装置
【課題】監視対象となる高温物が所定の撮像位置に位置したことを検出するための機械的リミットスイッチを用いず、それを設置するためのスペース及び作業コストが不要になる熱画像保存装置の提供。
【解決手段】熱画像2aを生成する熱画像生成手段2には、熱画像2aの処理を行う熱画像処理手段3が接続されている。熱画像処理手段3には、取鍋4が所定の撮像位置に位置した際に熱画像2a内で取鍋4が占める領域内の温度を監視して、領域内の温度が所定の検出用閾値以上である場合に、取鍋4が撮像位置に位置したことを検出する位置検出部30が含まれている。
(もっと読む)
位置検出装置、描画装置、および、位置検出方法
【課題】基板の面内領域から取得できる情報を用いて、基板の位置を迅速かつ確実に検出できる技術を提供する。
【解決手段】位置検出装置は、基板9を載置するステージ11と、ステージ11に載置された基板9の面内領域を撮像する撮像部と、撮像部が取得した撮像データに基づいて基板9の位置を特定する位置特定部と、を備える。位置特定部は、撮像データを解析して、基板の表面に形成されたスクライブラインのうち最外周に配置されている最外周スクライブライン910を検出し、最外周スクライブライン910の検出位置に基づいて、レイアウト領域93の中央に配置されている中央チップ領域920の位置を特定する。そして、中央チップ領域920の位置に基づいて、基板中心90の位置を特定する。
(もっと読む)
三次元位置・姿勢認識装置、産業用ロボット、三次元位置・姿勢認識方法、プログラム、記録媒体
【課題】ステレオマッチング処理において互いに異なる部品91a〜91c間で対応付けが行われるといった誤対応の発生を抑制する。
【解決手段】認識対象部品91aを含む複数の部品91a〜91cを異なる視点から撮像した複数の撮像画像I1、I2それぞれから、認識対象部品91aが写る対象領域R1、R2が抽出される。複数の撮像画像I1、I2それぞれの対象領域R1、R2に対して、ステレオマッチング処理が実行される。つまり、ステレオマッチング処理を行う領域R1、R2を、撮像画像I1、I2のうちの認識対象部品91aを含む対象領域R1に限定する。そのため、対象領域R1から認識対象部品91a以外の部品91b、91cを外してステレオマッチング処理を実行することができ、その結果、ステレオマッチング処理において互いに異なる物体間で対応付けが行われるといった誤対応の発生を抑制できる。
(もっと読む)
回路基板の個体識別装置および個体識別方法
【課題】回路基板の個体識別を簡便かつ容易に実現する回路基板の個体識別装置および個体識別方法を提供すること。
【解決手段】回路基板100上の複数の計測対象110の位置を計測し、計測対象110の計測値と計測対象110の設計値との差を計測対象110ごとの位置情報として取得する位置情報取得手段10と、位置情報取得手段10によって取得された位置情報の組み合わせを基板識別符号として登録する登録手段20とを備える回路基板の個体識別装置。
(もっと読む)
個体識別装置、個体識別方法、及びプログラム
【課題】所定の特性を有する微小細粒(タガント)を物品に付与し、更にその分布位置に基づいて高精度に個々の物品を識別することが可能な個体識別装置等を提供する。
【解決手段】個々の物品1の基材10上に、基材とは異なる光学反射特性を有し、かつ、異色の微細物質12、並びに特徴的な図案及び形状等を有する微細物質をランダムに配置しておく。また個々の物品をスキャナ等により光学的に読み取り、所定の画像処理を施して微細物質の特徴点及びその特徴点における色情報に関する特徴量を抽出し、基準特徴量データとして記憶部に記憶しておく。識別対象となる物品を上述の読み取りの際と同様の手法で読み取り、同様の画像処理を施して微細物質の対象物特徴量データを抽出する。そして、抽出した対象物特徴量データと記憶されている基準特徴量データとを比較することにより識別対象とする物品と基準物品とが同一個体であるか否かを判定する。
(もっと読む)
振動計測装置および振動計測方法
【課題】振動の測定および解析を容易に行うことができるようにする。
【解決手段】高速度カメラ4の撮像部4aは、ケーブル10の各実測点に設けられたマーカーシール5が正反射する光を撮像する。高速度カメラ4の計算処理部4bは、撮像部4aによる撮像と並行して、撮像部4aが撮像した画像毎に各実測点の座標を求める。高速度カメラ4のメモリ4cは、各実測点の座標に係るデータを記憶する。コンピュータ6は、メモリ4cに記憶された各実測点の座標に係るデータを用いてケーブル10の振動分析を行う。
(もっと読む)
対象物体の検出方法、検出装置及びプログラム
【課題】対象物体を3次元の点群として計測した場合の形状データに基づいて、高速化を図りつつ精度よく対象物体を検出することの可能な検出方法を提供する。
【解決手段】3次元計測手段から3次元の計測点群として球体の形状データを取得する形状データ取得ステップ(S1)と、仮想座標空間において球体が占める対象体領域を各計測点の付加情報に従って区画する領域分割ステップ(S41)と、分割された各対象体領域の中から球体と推定される推定領域を抽出する対象体領域抽出ステップ(S43)と、推定領域毎に推定球体を生成し、対象体と認識される推定対象体を認識対象体とする対象体認識ステップ(S44)とを備える。
(もっと読む)
バーコード外観検査システム、バーコード外観検査方法
【課題】バーコードの外観不良を簡易に検査できるバーコード外観検査システム等を提供する。
【解決手段】バーコード外観検査システムの画像処理装置の制御部は、カメラで撮影されたバーコード6の撮影画像データを取得し、バーコード6のバー配列方向の両端部のエッジ65の位置と、バー配列方向の両端部の近傍におけるバー長さ方向の両端部のエッジ67a、67bの位置を算出する。続いて、これらエッジ65、67a、67bの位置に基づきバーコード6の中心座標等を演算して求め、これに基づきバーコード6の欠陥検出領域を生成する。次に、この欠陥検出領域において、バー長さ方向の微分フィルタ演算と演算結果の2値化を行い、バーコード6の汚れ61、抜け63等の欠陥領域を検出する。いずれかの欠陥領域の面積が所定値以上の場合に、画像処理装置の制御部は、バーコード6に外観不良があると判定する。
(もっと読む)
1 - 20 / 839
[ Back to top ]