
Fターム[2F065AA39]の内容
光学的手段による測長装置 (194,290) | 測定内容 (27,691) | 角度;姿勢 (2,368) | 回転角 (292)
Fターム[2F065AA39]の下位に属するFターム
Fターム[2F065AA39]に分類される特許
101 - 120 / 273
3次元モデルの作成方法および物体認識装置
【課題】実物モデルとカメラとの位置関係を任意に変更して3次元計測を行い、各計測により復元された3次元情報を位置合わせして統合する方法でも、精度の良い3次元モデルを作成できるようにする。
【解決手段】3次元認識の対象とするワークの実物モデルWMの所定箇所に、向きを一意に特定できる形状の多角形のマークMを取り付ける。そして、このマークMが各カメラ11,12,13の視野に含まれる状態が維持されるように実物モデルWMの姿勢を変更して3次元計測を行う処理を、複数回実行する。さらに、毎回の計測により復元された3次元情報のうちの2以上の所定数を選択し、これらを位置合わせして統合した後、統合された3次元情報からマークMに対応する情報を削除または無効化し、その処理後の3次元情報を3次元モデルに設定する。
(もっと読む)
3次元モデルの作成方法および物体認識装置

【課題】容量をできるだけ少なくして精度の良い3次元モデルを作成する。
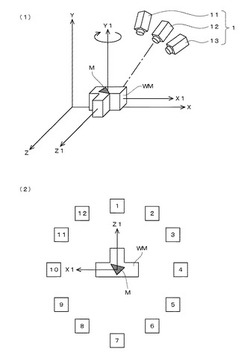
【解決手段】3次元認識の対象とするワークの実物モデルWMに対し、ステレオカメラによる3次元計測を複数の方向から実行する。つぎに、各計測により復元された3次元情報のうちの所定数([12][3][6][9]の各計測ポイントの3次元情報)を位置合わせして統合することにより、仮の3次元モデルを作成する。さらに、統合されなかった3次元情報を対象に、仮の3次元モデルによる認識処理を実行し、その認識結果が正しくないと判定された3次元情報(計測ポイント[10]の情報)を仮の3次元モデルに位置合わせしてから統合する。最終的に、正しく認識されなかった3次元情報のすべてが追加された3次元モデルを本登録する。
(もっと読む)
形状測定装置
【課題】貫通孔を有するワークを、貫通孔が所定軸方向に平行となるように、短時間で載置可能に構成された形状測定装置を提供する。
【解決手段】形状測定装置は、貫通孔12aを有するワーク12を載置可能に構成され且つX軸及びY軸に回転可能に構成された回転テーブル13a、貫通孔12aの一方側からZ軸に平行に光を照射する光源13b、貫通孔12aの他方側に配置され且つ貫通孔12aを通過した光源13bからの光を受光してその受光した光に基づく輝度を測定するCCDカメラ18a、回転テーブル13aによるワーク12の回転角度をCCDカメラ18aにて測定された輝度に基づき制御する制御部35を備える。制御部35は、回転テーブル13aによりワーク12を所定角度ずつ回転させる毎に、CCDカメラ18aにより輝度を測定させ、その輝度が最大となる角度に回転テーブル13aの回転角度を設定する。
(もっと読む)
穴形状測定装置および穴形状測定方法
【課題】 穴の全体形状だけでなく、穴の壁面に形成された微細な凹凸形状をも精度良く測定する。
【解決手段】 管状プローブ80からレーザ光を測定対象穴の壁面に照射し、レーザ光の焦点位置と壁面における反射位置とのずれ量(焦点ずれ量)に応じたフォーカスエラー信号を生成するフォーカスエラー信号生成回路111,112を備える。コントローラ100は、管状プローブ80を回転させながらZ方向(管状プローブの中心軸方向)に移動させて、レーザ光を測定対象穴の壁面に螺旋状に照射する。そして、管状プローブ80のZ方向位置と、管状プローブ80の回転角度と、フォーカスエラー信号から得た焦点ずれ量とに基づいて測定対象穴の3次元形状を算出する。
(もっと読む)
基準マーク移動装置及び基板アライメント装置
【課題】基板アライメント装置が緊急停止した場合に、マーク保持部が基板及び基板保持部と衝突することを防止する。
【解決手段】上ステージ部と下ステージ部とにより互いに面方向に相対移動されて位置合せされる一対のウエハに設けられたアライメントマークを撮像する上顕微鏡148と下顕微鏡150との視野内に、上顕微鏡148と下顕微鏡150とにより撮像される上顕微鏡148と下顕微鏡150との相対位置検出用の基準マーク146を出し入れする基準マーク移動装置100であって、基準マーク146を保持するボード144と、ボード144におけるマーク形成部分をウエハ及びウエハホルダの移動通路に出入りさせると共に、駆動が停止された場合に、ボード144の全体を移動通路の外部へ退避させる昇降装置102と、を備える。
(もっと読む)
車載カメラの校正装置
【課題】車種ごとのチューニングを抑制して汎用性の高い車載カメラの校正装置を提供する。
【解決手段】床面上に配置された校正指標を撮影範囲内に含む車載カメラ1によって撮影された撮影画像を受け取る画像受け取り部3と、撮影画像を床面に対して直交する方向から見た変換画像に視点変換する視点変換部11と、変換画像上において校正指標が含まれる領域を、車載カメラ1が搭載される車両の種別に応じて設定された座標値に基づき、認識対象領域として設定する領域設定部12と、認識対象領域において校正指標内の校正点を検出する校正点検出部15と、校正点の空間上の配置位置を示す基準座標系における座標及び変換画像上において検出された校正点のカメラ座標系における座標に基づいて、車載カメラ1を校正する校正演算部17とを備える。
(もっと読む)
ビデオカメラを制御して可動なターゲットオブジェクトを追跡する方法とシステム
計器座標系を有するビデオカメラの照準点までの軸の方向を制御することにより、可動なターゲットオブジェクト上のポイントオブインタレスト(POI)を追跡して、当該移動しているターゲットオブジェクトを含む局所座標系におけるPOIの位置を計算するための方法が開示される。本方法は、照準点までの軸の回転角及び傾斜角と、照準点までの軸に実質的に沿った距離とを測定すること、並びに、計器座標系において決定された位置を局所座標系において決定された位置に変換するキャリブレーションマトリックスを計算することを含む。一つの計器と少なくとも一つのコンピュータとを含むシステムが開示され、このシステムでは、計器はビデオカメラと距離計とを含んでおり、ビデオカメラは、方向の調節が可能な照準点までの軸を含んでいる。一実施例では、ターゲットオブジェクトは航空機の表面上を移動して同表面を検査する。 (もっと読む)
球面形状測定装置および球面形状測定方法
【課題】 非接触で球面形状を高精度に測定できる球面形状測定装置および球面形状測定方法を提供する。
【解決手段】 被測定物支持手段10と、被測定物回転手段20と、非接触変位計31および変位計回動手段32を有する球面形状測定手段30と、変位計位置調整手段および被測定物位置調整手段80とを備え、この被測定物位置調整手段80は、非接触変位計31の回動中心に非測定物1の軸部1bの中心軸を位置調整する。
(もっと読む)
光学測定装置
【課題】測定にかかる時間を低減させることができるとともに、鉛直方向に移動する被測定物のローリング角度の変位を測定することができる光学測定装置の提供。
【解決手段】光学測定装置1は、レーザ光源21と、平行化レンズ25と、第1の受光素子23とを有する装置本体2と、反射ミラー31を有し、被測定物に取り付けられる測定体3とを備える。測定体3は、反射ミラー31の近傍位置に設けられ、装置本体2から射出される光を反射する一対の反射手段32A,32Bを備える。装置本体2は、偏光ビームスプリッタ24と、各反射手段32A,32Bにて反射され、偏光ビームスプリッタ24にて分離される光をそれぞれ受光する一対の第2の受光素子26A,26Bと、各受光素子23,26A,26Bにて受光される光の位置変位に基づいて、被測定物の角度変位を算出する算出手段とを備える。
(もっと読む)
画像処理におけるパターンモデルの位置決め方法、画像処理装置、画像処理プログラム及びコンピュータで読み取り可能な記録媒体
【課題】最小二乗法を用いた精密位置決めの精度、特に回転角度の精度を向上させる。
【解決手段】登録画像から輪郭を抽出し、登録画像のパターンモデルを構築する工程と、サーチ対象画像を取得すると共に、該サーチ対象画像中に含まれる登録画像に対応する初期位置を取得し、該初期位置に従って、前記パターンモデルをサーチ対象画像上に重ねるように配置する工程と、前記パターンモデルを構成する各円弧セグメントに対応するサーチ対象画像上の個々の対応エッジ点を求める工程と、各円弧セグメントとその対応エッジ点との関係を評価値とし、該評価値の累積値が最小又は最大となるように、前記与えられた初期位置の精度よりも高い精度で精密位置決めを行う工程とを含む。
(もっと読む)
姿勢測定装置
【課題】被検体の測定光軸回りの回転角度と測定光軸に対する傾斜角度を、共に高精度に測定することが可能な小型で軽量の姿勢測定装置を得る。
【解決手段】反射素子40は、光軸Lと垂直となるように配された第1反射平面41と、互いに直交するように配された1対の第2反射平面42,43とを備え、第1反射平面41からは第1の光が反射され、1対の第2反射平面42,43からは第2の光が反射されるように構成されている。第1反射平面41から反射された第1の光により形成された標線像の位置変化量に基づき、カメラ2の光軸Lに対する傾斜角度が測定され、1対の第2反射平面42,43から反射された第2の光により形成された標線像の回転角度変化量に基づき、カメラ2の光軸L回りの回転角度が測定される。
(もっと読む)
ディジタルビデオフィルタおよび画像処理
【課題】 フーリエ変換の必要性を除去し、したがって時間のかかる乗算および加算を除去する、ビデオディジタル色画素フィルタリングおよびディジタル画像処理のための装置。
【解決手段】 それは、単純なソフトウェアを活用して各プロセッサがリアルタイム対話型ディジタル画像処理のレーテンシ問題を最小にする、ファーストイン/ファーストアウトメモリと連動して動作する新しい分散型コンピュータアーキテクチャを活用する。この分散処理アーキテクチャは、FIFOが1台のプロセッサからもう1台に半分処理されたデータを伝える、工場組立てラインと同様の方法で動作するように設定される。独特のメモリベースのシステムが、6自由度で移動する移動オブジェクトの、距離および回転ベクトルを含む動きベクトルを測定するのに用いられる。
(もっと読む)
運動推定装置及びプログラム
【課題】簡易な構成で、撮像手段の位置及び姿勢の変化を高精度に推定することができるようにする。
【解決手段】画像撮像装置12によって第1の画像及び第2の画像を撮像し、特徴点抽出部30によって、第1の画像から、複数の特徴点を抽出し、対応点検索部32によって、抽出された特徴点の各々に対応する点を、第2の画像から検索する。また、特徴点重み決定部34によって、特徴点の各々について、第1の画像の特徴点を中心としたウィンドウ内に存在する特徴点の数が少ないほど大きい重み係数を決定する。そして、運動推定部36によって、対応する第1の画像の特徴点と第2の画像の点との複数の組に基づいて推定される画像撮像装置12の位置及び姿勢の変化であって、第1の画像と第2の画像との間で対応する特徴点と点との組の重み係数の総和が最大となる位置及び姿勢の変化を、画像撮像装置12の位置及び姿勢の変化として推定する。
(もっと読む)
電子部品実装方法および装置
【課題】 ロータリヘッドを備えた部品移載装置を移動台に交換可能に固定した電子部品実装装置において、交換した部品移載装置のロータリヘッドの各スピンドルの回転中心位置の各補正値を容易且つ正確に求める。
【解決手段】ロータリヘッドの複数のスピンドルの中、実装ポイントに割出されたスピンドルの回転中心が、校正された部品認識用カメラの光軸の座標位置に位置するように移動台を移動する。各スピンドルを第1回転角度位置および第1回転角度位置と異なる第2回転角度位置にそれぞれ位置決めした状態で各スピンドルに装着された吸着ノズルの先端を部品認識用カメラで撮像する。実装ポイントに割出された第1および第2回転角度位置での各吸着ノズルの先端画像の中心位置に基づいて各スピンドルの回転中心位置の各補正値を効率的に正確に求めることができる。
(もっと読む)
露光装置及びデバイス製造方法
【課題】
レチクルとウェハ(ウェハステージ)との位置合わせ計測に用いる手順を状況に応じて変更させるようにした露光装置及びデバイス製造方法を提供する。
【解決手段】
原板(レチクル)ステージに保持された原板を基板(ウェハ)ステージに保持された基板に位置合わせして原板のパターンを基板に投影し基板を露光する露光装置であって、原板に付されたマークと基板ステージに付されたマークとの位置関係を計測する計測部と、原板に付されたマークと基板ステージに付されたマークとを計測部の視野内に入れて計測部に計測を実行させる制御部とを具備し、制御部は、第1の手順(第1の手順は、第2の手順よりも計測部による原板に付されたマークの計測回数が少ない)及び第2の手順を少なくとも含む複数の手順のいずれかにしたがって計測部に計測を実行させ、当該実行した計測により得られた結果に応じて位置合わせを行なうように構成される。
(もっと読む)
ロボットハンドの姿勢検知システム
【課題】機器構成を簡素化して製造コストの低減及び耐久性の向上を実現するとともに、あらゆる姿勢において、その姿勢を検知することを実現したロボットハンドの姿勢検知システムを提供する。
【解決手段】ロボットハンド1の指部2において、その外周面2cにはバンド8が巻き付けられている。バンド8の外周面には、互いに異なる色で着色された複数の領域b1,b2,b3,・・・,bnが形成されている。各領域b1〜bnに着色された色の色相は、それぞれ指部2の長手方向に沿って同一である。また、各領域b1〜bnの色相は、指部2の周方向に沿って連続的に変化している。ロボットハンド1から所定の距離を隔てた位置には、指部2を撮影するためのカメラ7が配置されている。カメラ7が撮影した指部2の画像は制御部6に出力され、制御部6は、画像上におけるバンド8のエッジ及び色相の変化に基づいて、ロボットハンド1の姿勢を検知する。
(もっと読む)
携帯電子機器
【課題】複数の反射部における反射効率の違いを利用することなく、光学的に2つの筐体間の相対的な回転位置を検出することができる携帯電子機器を提供すること。
【解決手段】光Rを発光する第1発光部51と、第1発光部51が搭載される第1筐体2と、光Rを受光する第1受光部61と、第1受光部61が搭載されるとともに第1筐体2に対して回転軸41を中心に回転可能に連結される第2筐体3と、第1受光部61における第1発光部51から発光された光Rの受光の有無を検出することにより、第1筐体2に対する第2筐体3の回転位置を検出する検出部と、を備え、第1発光部51は、第1筐体2において、回転軸41を中心とする第1の円周C1上に配置され、第1受光部61は、第2筐体3において、回転軸41を中心とするとともに第1の円周C1に対向する第2の円周C2上に配置されている。
(もっと読む)
複数ディスプレイ設置設定装置、方法、プログラム、及びシステム
【課題】サイズの異なる複数のディスプレイが部屋の中に自由に配置された場合には、各ディスプレイの相対位置の情報を設定するのが困難だった。
【解決手段】メインディスプレイ210からの指示により、設置設定装置230は予め1つ以上備える一意な測定用画像を、検出可能な各ディスプレイ210及び220に表示させ、各ディスプレイからディスプレイサイズの情報を取得する。ユーザはその様子をデジタルカメラを用いて撮影した画像を設置設定装置230に与える。設置設定装置230は画像から測定用図形を抽出し、各測定用画像の3次元位置を推定する。設置設定装置230は、各測定用画像の3次元位置からメインディスプレイ210を基準とする相対位置および相対角度と、各ディスプレイのディスプレイサイズからメインディスプレイ210を基準とする相対サイズとを算出し、各ディスプレイの相対位置の情報としてメインディスプレイ210に送付する。
(もっと読む)
露光装置及び露光方法、並びにデバイス製造方法
【課題】高精度且つ安定な移動テーブルの位置計測を実現する。
【解決手段】 液浸露光方式の露光装置において、投影光学系PLとの間に供給される液体によってウエハW上面に液浸領域ALqが形成され、そのウエハWを保持する移動テーブル上に、複数のエンコーダヘッド60A〜60Dが配置されている。制御装置は、複数のエンコーダヘッドのうち、液浸領域外にあるエンコーダヘッド60A,60B,60Dを用いて、XY平面内における移動テーブルの位置情報を計測する。これにより、高精度且つ安定な移動テーブルの位置情報の計測が可能となる。
(もっと読む)
計測方法、ステージ移動特性の調整方法、露光方法及びデバイス製造方法
【課題】
走査型露光装置を用いる基板上のショット配列の精度を計測する計測方法において、より短時間でショットの配列精度を評価する計測方法を提供する。
【解決手段】
第1の露光においてウェハ上に転写されたショットA(i,j+1), A(i,j)と、そのウェハを90°回転させた第2の露光においてウェハ上に転写されたショットB(i,j), B(i+1,j)とを重畳させ、その重畳領域において、ショットA(i,j+1), B(i+1,j)に含まれる中実箱型マークとショットB(i,j)に含まれる中空箱型マークが重なり合い、ショットA(i,j)に含まれる中空箱型マークとショットB(i,j)に含まれる中実箱型マークが重なり合う。形成した重ね合わせマーク37〜42を、全ての重畳領域内のマークに関して計測し、これら重畳領域を形成する全てのショットの相対的な位置誤差および回転誤差を一括して演算する。
(もっと読む)
101 - 120 / 273
[ Back to top ]