
Fターム[2F065AA39]の内容
光学的手段による測長装置 (194,290) | 測定内容 (27,691) | 角度;姿勢 (2,368) | 回転角 (292)
Fターム[2F065AA39]の下位に属するFターム
Fターム[2F065AA39]に分類される特許
61 - 80 / 273
ステージ装置、露光装置、駆動方法及び露光方法並びにデバイス製造方法
駆動系により、アーム部材(71)から移動体(WFS)のXY平面に平行な一面に配置されたグレーティング(RG)に対して計測ビームを照射して移動体のXY平面内の位置を計測する第1計測系の計測結果と、レーザ干渉計を用いてアーム部材(71)の形状変化を計測する第2計測系の計測結果と、に基づいて移動体が駆動される。駆動系は、第1計測系の計測結果に含まれるアーム部材の形状変化に起因する計測誤差を、第2計測系の計測結果を用いて補正する。 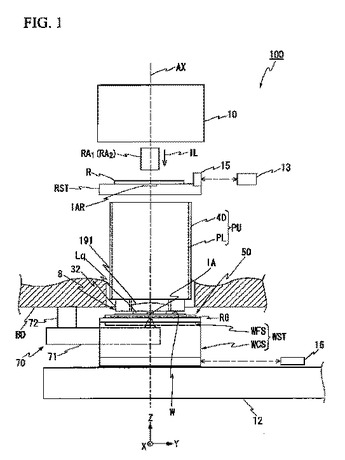 (もっと読む)
(もっと読む)
エンジンマウントの変位量計測装置

【課題】高速な振動現象の下にあっても、エンジンマウントのマウント軸として配設されるボルトの中心の3軸並進量、及び、該ボルトの2軸回転量を高精度に算出することができる、エンジンマウントの変位量計測方法、及び、エンジンマウントの変位量計測装置を提供する。
【解決手段】エンジンマウント10のマウント軸であるボルト12の両端に固定した、半径が既知である2個の球体13・13の変位を、それぞれについて3箇所ずつレーザー変位計31〜33、34〜36で計測する球体変位計測工程と、球体変位計測工程で計測した球体13・13の変位結果に基づいて、球体13・13の中心I・Jの3次元座標X1・X2をそれぞれ算出する座標算出工程と、座標算出工程で算出した2個の3次元座標X1・X2に基づいて、ボルト12の中心Kの3軸並進量、及び、ボルト12の2軸回転量θ・φを算出するマウント軸変位算出工程とを備える。
(もっと読む)
回転位置検出装置

【課題】カメラの前方視界の妨げず、鋼管内面の撮影上で逆光状態とならずに、鋼管内面の周方向の位置を特定することを可能にすることにある。
【解決手段】鋼管検査測定装置102に固定されるベース部材21と、偏心位置を揺動中心22cとしてベース部材21に取り付けられ時計方向の側面位置の第1可動接点22a及び反時計方向の側面位置の第2可動接点22bを有する可動端子22と、重心が揺動中心22cより下方に位置し静止した可動端子22の第1可動接点22aに対向し可動端子22が時計方向に揺動した際に第1可動接点22aと接触する第1固定接点23aを有する第1固定端子23と、重心が揺動中心22cより下方に位置し静止した可動端子22の第2可動接点22bに対向し可動端子22が反時計方向に揺動した際に第2可動接点22bと接触する第2固定接点24aを有する第2固定端子24とを備えている。
(もっと読む)
デジタルスケールの検出信号補正方法及び検出信号補正装置
【課題】検出部のエンコーダ信号である2相正弦波信号が、リサージュ波形の表示時において2重になるときも、位置を正確に検出、補正することができるデジタルスケールの検出信号補正方法及び検出信号装置を提供すること。
【解決手段】デジタルスケールの検出信号補正方法及び検出信号補正装置は、2相正弦波信号の周波数の整数分の1の周波数を有する信号により補正を行い、また、2相正弦波信号を組とし、2つの補正区間ごとに各相正弦波信号のオフセット、大きさの比、位相差を補正することにより、高精度の位置検出を可能とするものである。
(もっと読む)
エンジンマウントの変位量計測方法
【課題】高速な振動現象の下にあっても、エンジンマウントのマウント軸として配設されるボルトの中心の3軸並進量、及び、該ボルトの2軸回転量を高精度に算出することができる、エンジンマウントの変位量計測方法を提供する。
【解決手段】本発明に係るエンジンマウントの変位量計測方法は、球体変位計側工程の前に、照射方向と直交する平面上における初期座標が既知である球体13を、照射方向と直交する方向へ、初期座標の位置から既知の移動量dx(dy)だけ移動させ、第1レーザー変位計31a〜第3レーザー変位計31cによる計測点におけるそれぞれの照射方向変位量δS1x〜δS3x(δS1y〜δS3y)を計測し、照射方向変位量δS1x〜δS3x(δS1y〜δS3y)の計測結果から、第1レーザー変位計31a〜第3レーザー変位計31cの位置を算出する、位置算出工程を備える。
(もっと読む)
検出方法、ウェーハ搬入方法および検出装置
【課題】ウェーハの外周端に形成された異形状部の位置を迅速に検出すること。
【解決手段】ある実施の形態における検出方法は、外周端が円弧部と異形状部とで構成されるウェーハを載置した回転ステージ911を所定角度毎に断続的に回転させながら、その停止時における撮像カメラ93の撮像範囲を撮像して撮像範囲内における外周端の位置を撮像データとして取得するとともに、回転ステージ911の回転時において撮像カメラ93の撮像範囲を通過する外周端の位置変化を実測データとして取得する。その後、撮像データの中からウェーハの円弧部上の位置を選択し、円弧部を含む円の円周全周の位置が撮像範囲に位置付けられたときの撮像範囲内における位置変化を回転ステージ911の回転角度毎に表した基準データを作成する。そして、実測データを基準データと比較して異形状部の位置を検出する。
(もっと読む)
描画装置、プログラム及び描画方法
【課題】同じ基板について2種類以上の基準マークの位置を各々検出し、同じ種類の基準マークの検出結果から求めた補正量を、異なる種類の基準マークに適用して補正量を評価することで、同じ傾向を有する誤差を容易に検出して適正な補正を行うことができる、描画装置、プログラム及び描画方法を提供する。
【解決手段】第1基準マークに基づいて得られた第1補正量で第1基準マークの設定位置を補正して、補正後位置の検出位置からの誤差(第1ずれ量)を演算し、第2基準マークに基づいて得られた第2補正量で第2基準マークの設定位置を補正して、補正後位置の検出位置からの誤差(第2ずれ量)を演算する。第1補正量で第2基準マークの設定位置を補正して、補正後位置の検出位置からの誤差(第3ずれ量)を演算し、第2補正量で第1基準マークの設定位置を補正して、補正後位置の検出位置からの誤差(第4ずれ量)を演算する。
(もっと読む)
位置検出装置、位置検出方法および基板重ね合わせ装置
【課題】互いのウェハを位置合わせして重ね合わせるときに、ステージの回転量が所定量を超えてしまうと、ステージの正確な位置を把握することが困難となる。ステージの回転量が所定量を超えないように制御するには、そもそも最初にステージに置かれるウェハの位置を厳密に管理する必要がある。
【解決手段】位置検出装置は、第1基板に設けられた少なくとも2個の第1基板指標を一度の撮像動作により撮像する第1撮像ユニットと、第1撮像ユニットにより撮像された画像に基づいて第1基板指標の位置を計測することにより、第1基板の姿勢を測定する測定部とを備える。
(もっと読む)
位置検出装置、位置検出方法、及び位置検出プログラム
【課題】人間型脚式移動ロボットや自動車が自律的に移動する際の自己の位置検出を簡単に行うことができる位置検出装置を提供することを目的とする。
【解決手段】移動体の自己位置を検出する位置検出装置であって、前記位置検出装置は、前記移動体の前方視野の画像を取得する画像取得手段と、前記画像取得手段と同一の視野を有し、前記画像取得手段が画像を取得するのと同時に距離画像を取得する距離画像取得手段と、得られた画像からそれぞれ特徴点を抽出する特徴点抽出手段と、予め記憶された物体情報と抽出された特徴点とを比較して、相関が高い特徴点を既知と特徴点と見なして自己位置を算出するための基準特徴点とする基準特徴点選択手段と、を備えたことを特徴とする。
(もっと読む)
測定対象物の検査方法
【課題】測定対象物の検査方法を提供すること。
【解決手段】基板に装着された素子の検査方法において、素子に対応する形状テンプレートを生成する段階と、照明部の格子パターン光を基板に照射してピクセル別高さ情報を獲得する段階と、ピクセル別高さ情報に対応してコントラストマップを生成する段階と、コントラストマップと形状テンプレートとを比較する段階と、を含む。本発明によると、測定対象物を正確に抽出することができる。
(もっと読む)
3次元形状測定装置、3次元形状測定方法
【課題】従来の3次元形状測定装置は複雑で大がかりなものや相当数のカメラを必要とするものが多かった。また、1台のカメラのみを用いた3次元形状測定装置で、精度良く測定対象物の形状を検出するものが見られなかった。
【解決手段】以上の課題を解決するため、回転テーブルの上に載置された測定物体が撮影された動画像を取得し、取得した動画象から得られる測定物体の特徴点の投影回転軌跡や投影回転中心の2次元投影座標等のデータに基づいて特徴点の回転半径、回転中心高度、特徴点間の角度を検出し、3次元位置データを出力可能な3次元形状測定装置、3次元形状測定方法を提案する。
(もっと読む)
形状測定方法及び形状測定装置
【課題】球体を形状測定する作業性を向上させる形状測定方法及び形状測定装置を実現する。
【解決手段】形状測定装置100は、球体200を第1の回転部31によって光軸L回りに所定の角度で回転させる度に、球体200の一断面形状を撮像して得た複数の写像情報に基づいて、形状測定装置100の系統誤差成分である対物レンズ40の収差に関する第1情報を取得することができる。そして、第2の回転部32によって、球体200をステム201の軸回りに所定の角度で回転させる度に、球体200を撮像して得た球体200の断面形状に関する複数の第2情報に対して、その第1情報に応じた補正を施すことができるので、アパーチャを測定基準として用いなくても、より正確に球体200の形状測定を行うことが可能になる。
(もっと読む)
表面検査装置
【課題】感度の高い表面検査が可能な表面検査装置及び表面検査方法を提供する。
【解決手段】所定のパターンが形成されたウェハ20の表面に直線偏光L1を照射する照明部10と、ウェハ20から出射される楕円偏光を受光し、直線偏光L1と振動方向が異なる第2の直線偏光成分のみを通過させる検光子3と、ウェハ20の像の信号強度を検出し、信号強度に基づいて被検基板の表面におけるパターンが形成されている位置を検出する位置検出部8bと、パターンが形成されている位置の信号強度が最小となるように、楕円偏光及び検光子3のいずれか一方を他方に対して相対回転させ、上記位置の信号強度が最小となる楕円偏光に対する検光子3の相対位置を決定し、上記相対位置に相対回転させる回転駆動装置30と、検光子3を通過した第2の直線偏光成分を検出し、パターンを検査する表面検査部とを備えたことを特徴とする。
(もっと読む)
ねじ転造装置
【課題】熟練していない者であっても、短時間で確実に、転造ダイス間のピッチを合わせること。
【解決手段】ねじ転造装置は、転造ブランク1を保持する保持部と、転造ブランク1に当接されてねじ山を転造する複数の転造ダイスと、各転造ダイスを保持して固定する装着軸と、各装着軸に連結されて該装着軸を回転させる回転駆動部50とを有するねじ転造盤を備えている。ねじ転造装置は、転造ダイスによって転造ブランク1に転造されたねじ山を撮影する撮影部71と、撮影部71によって撮影されたねじ山を拡大して表示する表示部72と、一の転造ダイスによって転造されたねじ山と、他の転造ダイスによって転造されたねじ山との間のずれを測定する測定部76も備えている。
(もっと読む)
多数のエリアアレイ型画像検出器を使用するヘッド搭載部品アライメント
【課題】ピック・アンド・プレイス機械のノズルに保持されたときに部品のオフセットおよび方向を検知するセンサを提供する。
【解決手段】センサは、複数の2次元カメラ300と、バックライト照明装置306と、コントローラ308とを含む。各カメラはピック・アンド・プレイス機械のノズルを含む視野を有する。バックライト照明装置は照明を複数の2次元カメラに向けるように構成されている。バックライト照明装置は複数の2次元カメラからノズルの反対側に位置決めされている。コントローラは複数の2次元カメラおよびバックライト照明装置に接続されている。コントローラは、複数の2次元カメラによって検出された、バックライトで照らされた複数の影の画像に基づいて(複数の)部品302のオフセットおよび方向情報を決定するように構成されている。コントローラはオフセットおよび方向情報をピック・アンド・プレイス機械のコントローラに供給する。
(もっと読む)
ビジョン検査システム及びこれを用いた座標変換方法
【課題】ビジョン検査システム及びこれを用いた座標変換方法を提供する。
【解決手段】本発明は、被検査体を支持するテーブルと、テーブルをY方向に直線往復移動させるステージと、被検査体またはテーブルのイメージを取得するためにX方向に沿って離隔して配置される複数のカメラを含むビジョン検査システムにおいて、X方向に沿ってテーブルの一端部に離隔して配置される複数の第1マークと、最も左側及び右側の第1マークから各々テーブルの一側部にY方向に沿って離隔して配置される複数の第2マークとを含み、第1マークのイメージを取得してイメージの座標値をステージの座標値に変換し、第2マークのイメージを取得してイメージの座標値とステージの座標値を被検査体を基準とした絶対座標値に変換し、被検査体を基準とした絶対座標値はステージの精度が補正された座標値であることを特徴とする。
(もっと読む)
被測定物の外形測定方法及び外形測定装置
【課題】表面に凹面が生じているような被測定物にも対応でき、外部の基準原器を用いることなく被測定物の外形情報を得る。
【解決手段】被測定物2を回転台1の上にのせロータリーエンコーダ4により回転台1の回転角を計測しつつ外部に設置した非接触距離センサ5により被測定物2の表面までの距離を計測して1回目の計測結果を得、被測定物2を任意に移動させた後に同じ計測を行って2回目の計測結果を得、パーソナルコンピュータ7で1回目と2回目の計測結果から得られる被測定物2のそれぞれの外形形状が一致するように1回目と2回目の計測結果を演算処理して被測定物2の外形情報を求める。
(もっと読む)
測定装置、露光装置及びデバイスの製造方法
【課題】スケールの位置が基準位置からずれている場合であっても、被測定体(例えば、ステージ)の位置を高精度に測定することができる測定装置を提供する。
【解決手段】いずれか一方が被測定体に設けられるスケール及びセンサを備え、前記スケールを前記センサで読み取ることで前記被測定体の位置を測定する測定装置であって、基準位置からの前記スケールのずれ量を検出する検出部と、前記検出部によって検出された前記基準位置からの前記スケールのずれ量に基づいて、前記スケールを前記センサで読み取ることで測定された前記被測定体の位置を補正する演算部と、を有することを特徴とする測定装置を提供する。
(もっと読む)
キャリブレーション装置および3次元計測のためのパラメータの精度の確認支援方法
【課題】3次元計測処理用のパラメータの算出が完了したときに、算出されたパラメータの精度を簡単に確認できるようにする。
【解決手段】撮像により生成された画像から位置関係が既知の複数の特徴点を抽出することが可能な形態のキャリブレーションワークを用いたキャリブレーション処理により3次元計測のためのパラメータを算出した後に、パラメータの算出に用いられたステレオ画像に含まれる複数の特徴点を対象に、算出したパラメータを用いた3次元座標の算出処理を実行する。そして、算出された各3次元座標を透視変換して、変換後の座標を所定のパターンで表した投影画像を生成し、これをモニタ装置に表示する。
(もっと読む)
容器蓋のブリッジ切れ角度測定装置及びその角度測定方法
【課題】容器蓋のブリッジの破断時における容器蓋の回転角を検出する容器蓋のブリッジ切れ角度測定装置を提供すること。
【解決手段】容器蓋2を打栓した容器本体23を所定位置に設置する容器クランパ32と、容器蓋2を回転可能に把持する蓋チャック37と、容器蓋2の周方向破断ライン7に光を照射して反射した反射光を受光する光センサー33と、光センサー33を周方向破断ライン7の外周部に沿って回転させるセンサー支持装置と、光センサー33が検出した反射光の変位によってブリッジの破断の有無を判断する破断検出部47と、破断検出部47がブリッジの少なくとも1つの破断を検出した時の容器蓋2の回転角を検出する破断角検出部51とを備えている。これらの構成物によって、容器蓋2を開栓したときのブリッジの破断角を測定できる。
(もっと読む)
61 - 80 / 273
[ Back to top ]