
Fターム[2F065AA39]の内容
光学的手段による測長装置 (194,290) | 測定内容 (27,691) | 角度;姿勢 (2,368) | 回転角 (292)
Fターム[2F065AA39]の下位に属するFターム
Fターム[2F065AA39]に分類される特許
21 - 40 / 273
3次元計測装置およびその方法
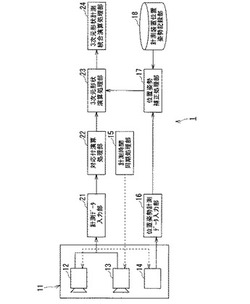
【課題】計測装置が揺動する状況下であっても、計測対象の3次元形状を好適に計測することができる3次元計測装置を提供する。
【解決手段】撮像装置12により撮像された画像データを含む撮像情報を取得する撮像部11と、撮像情報に基づいて計測対象の3次元座標を取得する3次元形状演算処理部23と、撮像装置12の加速度および姿勢角度を含む位置姿勢情報を撮像情報の取得と同期して取得する位置姿勢計測部14と、位置姿勢情報に基づいて計測原点に対する撮像装置12の移動量・方向と姿勢角度の変化量・方向とを演算する位置姿勢補正処理部17と、撮像情報と同期して取得された撮像装置12の移動量および方向と姿勢角度の変化量および方向とに基づいて3次元形状演算処理部23により得られる3次元座標を平行移動および回転して複数の3次元座標を統合し、計測対象の3次元形状を取得する統合演算処理部24とを備えた。
(もっと読む)
検出装置、検出方法、インプリント装置及びデバイス製造方法

【課題】 異なる2つの物体の回転ずれを計測する際に、従来と比較して計測時間の短い検出装置、検出方法、インプリント装置及びデバイス製造方法を提供すること。
【解決手段】 異なる2つの物体にそれぞれ形成された格子マークが重なることによって生じる干渉縞を用いて、前記2つの物体の相対的な回転ずれ量を求める検出装置において、前記干渉縞を検出する検出器と、該検出器で検出された前記干渉縞の傾きから前記異なる2つの物体の相対的な回転ずれ量を求める演算部と、を有することを特徴とする検出装置。
(もっと読む)
エンコーダ及び校正方法
【課題】ポリゴンミラーなどの静止物体の校正に使用されるエンコーダに有用な技術を提供する。
【解決手段】光源と、マークが一定のピッチで配列され相対移動するスケールと、スケールのピッチによって決定される周期の整数分の一の大きさの周期で偏光方向が回転する直線偏光を生成する光学系と、生成された直線偏光を第1直線偏光と第2直線偏光とに分割する分割部と、固定配置された第1偏光板を含み、スケールが相対移動する間における、第1偏光板を通過した第1直線偏光の偏光方向の回転の数を得る第1ユニットと、直線偏光の偏光方向に対して回転する第2偏光板を含み、スケールが静止したときにおける第2直線偏光の偏光方向を検出することによってスケールが静止したときにおける直線偏光の1回転内の位相を得る第2ユニットと、第1ユニットおよび第2ユニットにより得られた結果を統合してスケールの移動量を出力する出力部と、を備える。
(もっと読む)
パターン形成装置及びパターン形成方法、移動体駆動システム及び移動体駆動方法、露光装置及び露光方法、並びにデバイス製造方法
【課題】パターンが形成される物体を保持する移動体を安定して位置制御する。
【解決手段】露光装置は、ウエハを保持して所定平面内で移動するウエハステージと、所定平面内でウエハステージとは独立に移動する計測ステージと、計測ステージの位置情報を計測する干渉計システム118と、ウエハステージの位置情報を計測する、干渉計システム118に比べて計測値の短期安定性が優れるエンコーダシステム(70A〜70F)と、を備えている。このため、露光装置によると、干渉計システム118により計測ステージの位置情報が計測され、エンコーダシステム(70A〜70F)によってウエハステージWSTの位置情報が計測される。従って、パターンが形成されるウエハを保持するウエハステージを安定して位置制御することが可能となる。
(もっと読む)
偏芯回転センサならびに溶接トーチ揺動検出器および揺動装置
【課題】 電磁ノイズ等の外乱要因の影響を低減。電磁ノイズ等の外乱要因が大きく影響する作業環境下でも、誤動作なく溶接トーチを揺動駆動する。
【解決手段】 偏芯カム6を間にして相対向し該偏芯カムの周面に摺接する第1および第2のばね板2a,3a;各ばね板に固定されて各ばね板の偏芯カム回転対応の屈伸による張力に対応した波長の光を反射する第1および第2のFBG光ファイバ4a,5a;第1のFBG光ファイバ4aにレーザ光を送出し該FBG光ファイバ4aからの反射光を出力する第1の光カプラ8;および、第2のFBG光ファイバ5aにレーザ光を送出し該FBG光ファイバ5aからの反射光を出力する第2の光カプラ9);を備える。さらに、第1および第2の光カプラ8,9が出力する光相当の偏芯回転電気信号を発生する電気回路手段11〜13;を備える。
(もっと読む)
接触式プローブおよび形状測定装置
【課題】 プローブの伸び、及び周辺空気の温度、湿度の影響を抑えた高精度な形状測定を行うことのできる形状測定用の接触式プローブおよび形状測定装置を提供する。
【解決手段】 プローブシャフト2と先端球16を備えた接触式プローブ1において、
前記プローブシャフト2内の測長光路の少なくとも一部に透明体を設けることにより、少なくともこの部分だけ空気に暴露された光路を減らすことができる。その結果、外気の屈折率変化による測定誤差を抑え、精度を向上させることができる。
(もっと読む)
マーカ
【課題】本発明の課題は、マーカとマーカの観測物が正対する付近でも、マーカを観測物により正確に計測することができるマーカを提供することである。
【解決手段】上記の課題を解決するために、本発明に係るマーカは、模様と、模様の上に付けられたレンズであって、レンズを観測する方向に応じてレンズ上に観測される濃淡パターンが変化するレンズとを含むマーカユニットを備えることを特徴とする。
(もっと読む)
形状測定装置
【課題】プローブの撓みの影響を受けずに高精度の形状測定を行う。
【解決手段】プローブ先端部3に一体に平面ダイクロイックミラー10及び球面ミラー16を設ける。オートコリメータ光学系5により平面ダイクロイックミラー10の傾斜量を測定し、並進移動量測定光学系12により球面ミラー16のX,Y軸方向のずれ量を測定する。ずれ量算出部42bは、測定した平面ダイクロイックミラー10の傾斜量及び球面ミラー16のずれ量に基づいて、プローブ先端部3において被測定物4の表面に接触する接触点となる球19の基準位置に対するX,Y軸方向のずれ量を算出する。推定部42cは、ずれ量算出部42bにより算出されたずれ量から、プローブ先端部3の球19のX,Y軸方向の位置を推定する。
(もっと読む)
移動体駆動システム及び移動体駆動方法、パターン形成装置及び方法、露光装置及び方法、デバイス製造方法、並びに決定方法
【課題】エンコーダで位置を測定しつつ、移動体を所望の方向へ精度良く駆動する。
【解決手段】 駆動装置により、ウエハテーブルWTBのY軸方向の位置情報を計測するエンコーダ64の計測値とその計測時に干渉計16,43A及び43Bによって計測されるウエハテーブルWTBの非計測方向(例えば、Z、θz及びθx方向)の位置情報に応じた既知の補正情報とに基づいて、ウエハテーブルがY軸方向に駆動される。すなわち、非計測方向へのヘッドとスケールの相対変位に起因するエンコーダの計測誤差を補正する補正情報により補正されたエンコーダの計測値に基づいて移動体がY軸方向に駆動される。従って、ヘッドとスケールの間の計測したい方向(計測方向)以外の相対運動に影響を受けることなく、エンコーダで位置を計測しつつ、ウエハテーブル(移動体)を所望の方向へ精度良く駆動することが可能になる。
(もっと読む)
回転制御装置及び回転制御方法
【課題】 コンパクトな構成で作業台の回転制御の精度の向上を図ることができる回転制御装置及び回転制御方法を提供する。
【解決手段】 回転体の回転に連動して回転するロータリーエンコーダの読取信号を処理して回転ムラ信号と回転ブレ量信号とを生成し、回転駆動部において回転ムラ信号に応じて回転体の回転速度サーボ制御をなすステップと、処理部において回転ブレ量信号に応じてワークに対する位置サーボ制御をなす。
(もっと読む)
回転検出システム及び三次元ブラウジング装置
【課題】 撮影面に垂直な面内での被写体の回転を検出できる回転検出システムを提供することである。
【解決手段】 イメージセンサ25は、その撮影面43に垂直な面内で回転するリフレクタ2を撮影する。リフレクタ2は、再帰反射シート5R及び5Lを含む。MCU23は、撮影された2つの再帰反射シート5R及び5Lの像の面積同士を比較して、その比較結果に基づいて、撮影面43に垂直な面内でのリフレクタ2の回転方向及び回転量を算出する。コンピュータ33は、MCU23が算出したリフレクタ2の回転方向及び回転量に基づいて、仮想三次元空間を描画するための仮想カメラ55の姿勢を設定する。
(もっと読む)
内燃機関の変位計測装置
【課題】車両に搭載された内燃機関の変位量を容易にして精度良く計測可能な内燃機関の変位計測装置を提供する。
【解決手段】変位測定手段による第1被測定体と第2被測定体の測定結果に基づいて内燃機関の変位量を算出する変位量算出手段を備え、該変位量算出手段は、第1被測定体の第1測定面上に変位測定手段による測定点を含んで形成される第1直線部分l1、l'1の延長線と第2被測定体の第2測定面上に変位測定手段による測定点を含んで形成される第2直線部分m1、m'1の延長線との交点P(X、Z)、P'(X'、Z')を求め、該交点の第1直線部分と第2直線部分とにより形成される基準平面上での変位を演算することで内燃機関の変位量を算出する。
(もっと読む)
角度測定装置、角度の測定方法、及びプログラム
【課題】従来技術と比較して、簡易に角度を測定する。
【解決手段】ビデオカメラ12によって取得された複数個の画像データに基づいて算出された指定時刻から単位時間経過後の複数のマーカの各々の三次元位置、初期距離、及び初期角度に基づいて算出された各二次元移動量と、追尾結果により得られる指定時刻から単位時間経過後の前記複数のマーカの各々の前記画像上での各二次元移動量との差の二乗和、及び複数のマーカの各々の画像上での各二次元位置と、追尾結果により得られる指定時刻から単位時間経過後の複数のマーカの各々の画像上での各二次元位置との差の二乗和が最小となるように、初期移動量、初期座標、及び初期角度を調整した場合における調整後の初期角度を測定対象平面の角度として測定する。
(もっと読む)
ブリッジ接続不良検出方法
【課題】部品のターミナルを短絡させるブリッジを検出することのできるブリッジ接続不良検出方法を提供する。
【解決手段】部品のターミナルの間を短絡させるブリッジ(bridge)を検出するためのブリッジ接続不良検出方法は部品が実装された基板に照射され反射された複数の光を通じて2Dイメージ及び高さ基準情報を獲得する段階と、2Dイメージ及び高さ基準情報のうち少なくとも一つ以上を用いて部品の回転情報を獲得する段階と、回転情報を用いて部品のブリッジ接続不良を検出するための検査領域を設定する段階と、2Dイメージを用いて検査領域内の第1ブリッジ領域を抽出する段階と、高さ基準情報を用いて検査領域内の第2ブリッジ領域を抽出する段階と、第1及び第2ブリッジ領域のうち少なくとも一つ以上を用いて部品のブリッジ接続不良可否を判断する段階と、を含む。
(もっと読む)
車載情報装置,ナビゲーション装置
【課題】車速パルスのパルス抜けが発生している期間中の車両の走行距離を高精度で算出できる車載情報装置を提供する。
【解決手段】車載情報装置1の制御部10は、カメラ23が撮影した車輪21の撮影画像を取得する。制御部10は、取得した撮影画像と記憶部11のテンプレートデータベース111に記憶されている車輪21のテンプレート画像とのパターンマッチングに基づいて車輪21の回転数を取得する。制御部10は、車速センサ22が出力する車速パルスのパルス抜けが発生するときは、取得した車輪21の回転数に所定の係数を乗ずることにより車両2の走行距離を算出することができる。
(もっと読む)
画像計測装置、画像計測方法及びコンピュータプログラム
【課題】注目点の選定や注目点を追尾することが困難な複雑な形状の計測対象物であっても、また時間の経過とともに移動する計測対象物であっても、正確なキャリブレーションを実行することができ、所望の物理量を正確に計測することができる画像計測装置、画像計測方法、及びコンピュータプログラムを提供する。
【解決手段】フレーム画像をコマ送り再生表示し、コマ送り再生表示されたフレーム画像から、複数のフレーム画像の選択を受け付ける。選択を受け付けたフレーム画像を重ね合わせた合成画像を生成する。生成した合成画像を表示し、表示した合成画像上で所定の物理量を計測する。また、寸法が既知である球を計測対象物と同一の動画像に写り込むように配置し、計測対象物と球とを撮像して取得した動画像に基づいてキャリブレーションを実行する。
(もっと読む)
角度測定方法及び角度測定システム
【課題】回転角度を高精度且つ短時間で測定すること。
【解決手段】回転駆動される被測定物1の回転軸1aにロータリエンコーダ2の回転軸3を取り付けるとともに、被測定物1の回転軸1aとロータリエンコーダ2の回転軸3との偏心を許容するように、ロータリエンコーダ2の回転軸3に直交する面内におけるエンコーダ本体2aの変位を一定の遊び範囲内に規制し、ロータリエンコーダ2のエンコーダ読取ヘッドの読み取ったコードに基づいてロータリエンコーダ2の回転軸3の回転角度を測定するとともに、非接触角度検出手段20によりロータリエンコーダ2の回転軸3の回転角度測定開始時点からのエンコーダ本体2aの変化した角度を検出し、ロータリエンコーダ2を用いて測定された回転角度を非接触角度検出手段20で検出されたエンコーダ本体2aの変化した角度に基づいて補正する。
(もっと読む)
角度測定方法及び角度測定システム
【課題】回転角度を高精度且つ短時間で測定すること。
【解決手段】回転駆動される被測定物1の回転軸1aにロータリエンコーダ2の回転軸3を取り付けるとともに、被測定物1の回転軸1aとロータリエンコーダ2の回転軸3との偏心を許容するように、ロータリエンコーダ2の回転軸3に直交する面内におけるエンコーダ本体2aの変位を一定の遊び範囲内に規制し、被測定物1の回転軸1aに対するロータリエンコーダ2の回転軸3の偏心量を非接触で検出し、ロータリエンコーダ2の読取部の読み取ったコードに基づいてロータリエンコーダ2の回転軸3の回転角度を測定し、ロータリエンコーダ2を用いて測定された回転角度を、少なくとも前記検出された偏心量に基づいて、補正する。
(もっと読む)
画像処理装置及び画像処理方法
【課題】本発明は画像処理装置における撮影画面中の計測範囲設定の調整を容易にすることを目的とする。
【解決手段】視野内に搬送された対象物を撮像して2次元画像を得る撮像手段と、2次元画像を画面に表示する表示手段と、得られた2次元画像から対象物の輪郭を表す輪郭線を抽出する形状抽出手段と、輪郭線上の複数の点の位置を抽出する点位置抽出手段と、複数の点から2次元画像上の対象物の搬送方向における輪郭線の位置を代表する代表点の位置を決定する代表位置決定手段と、少なくとも代表点の位置と2次元画像上の対象物の搬送方向において予め設定された計測幅とに基づいて輪郭線を含む計測領域を得られた2次元画像上に設定する計測領域設定手段と、を備える。
(もっと読む)
動作モデル学習装置、3次元姿勢推定装置、動作モデル学習方法、3次元姿勢推定方法およびプログラム
【課題】関節位置を手動で指定することなく、姿勢推定の精度を向上させること。
【解決手段】学習時に、全身の関節に関する情報から一つの潜在変数モデルMを構築することに加えて、全身から一部分の関節を選択点として、選択点に関する情報から潜在変数モデルM1を学習し、この潜在変数モデルMと潜在変数モデルM1とを対応付ける動作モデルを学習により得る。これにより、3次元動作情報処理装置100は、推定時に、この動作モデルを参照して、2次元の画像において画像認識しやすく、追跡しやすい一部の関節の動きに基づき、潜在変数モデルMの潜在空間における全部の関節の位置を得ることができる。
(もっと読む)
21 - 40 / 273
[ Back to top ]