
Fターム[2F065AA39]の内容
光学的手段による測長装置 (194,290) | 測定内容 (27,691) | 角度;姿勢 (2,368) | 回転角 (292)
Fターム[2F065AA39]の下位に属するFターム
Fターム[2F065AA39]に分類される特許
41 - 60 / 273
動作モデル学習装置、3次元姿勢推定装置、動作モデル学習方法、3次元姿勢推定方法およびプログラム
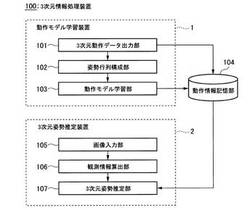
【課題】関節位置を手動で指定することなく、姿勢推定の精度を向上させること。
【解決手段】学習時に、全身の関節に関する情報から一つの潜在変数モデルMを構築することに加えて、全身から一部分の関節を選択点として、選択点に関する情報から潜在変数モデルM1を学習し、この潜在変数モデルMと潜在変数モデルM1とを対応付ける動作モデルを学習により得る。これにより、3次元動作情報処理装置100は、推定時に、この動作モデルを参照して、2次元の画像において画像認識しやすく、追跡しやすい一部の関節の動きに基づき、潜在変数モデルMの潜在空間における全部の関節の位置を得ることができる。
(もっと読む)
画像相関変位センサ

【課題】簡便な構成でターゲット面と垂直な成分を含む方向の変位量を測定することができる画像相関変位センサを提供すること。
【解決手段】本発明の一態様にかかる画像相関変位センサは、照射光を出射する照射部130'と、ターゲット面300で生成したスペックルフィールドを複数回に亘って撮像するために用いられ、ターゲット面近傍においてターゲット面の法線方向から傾斜した光線路Aと、光線路B'と、光線路A,B'の少なくとも一方を偏向する素子110'と、を有する撮像部240と、光線路Aにおいて撮像することにより得られた複数画像と光線路B'において撮像することにより得られた複数画像とに基づいて、ターゲット面300の法線成分を含む方向の変位を計算する処理部200と、を備えている。
(もっと読む)
撮像装置、物体検出方法及び姿勢パラメータの算出方法
【課題】特定のランドマークを設置しないでも、精度良く撮像装置の姿勢パラメータを取得可能な姿勢キャリブレーションを実現する。
【解決手段】撮像部により撮像された画像に含まれる物体を検出し、検出された少なくとも2つの物体について、それぞれ撮像された画像における正立状態からの回転角度を算出し、算出された前記少なくとも2つの物体の回転角度から撮像装置の設置角度に関する姿勢パラメータを算出する。
(もっと読む)
ジャギー発生量の測定方法
【課題】任意の画像を用いてジャギー発生量を適切に測定すること。
【解決手段】画像読み取り装置における画像読み取り部を移動方向に移動させ任意の画像
を読み取り、画像データーを取得することと、前記画像データーに基づいて、前記任意の
画像においてジャギー発生量を測定するための測定領域を特定することと、前記測定領域
における画像データーに基づいて、前記画像読み取り装置におけるジャギー発生量を測定
することと、を含むジャギー発生量の測定方法。
(もっと読む)
面位置検出装置、露光装置、および露光方法
【課題】反射面を通過した光束に発生する偏光成分による相対的な位置ずれなどの影響を実質的に受けることなく、被検面の面位置を高精度に検出することのできる面位置検出装置。
【解決手段】投射系は、第1反射面7b,7cを有する投射側プリズム部材7を備えている。受光系は、投射側プリズム部材に対応するように配置された第2反射面8b,8cを有する受光側プリズム部材8を備えている。第1反射面および第2反射面を通過した光束の偏光成分による相対的な位置ずれを補償するための位置ずれ補償部材をさらに備えている。
(もっと読む)
3次元形状測定装置
【課題】MEMSミラーを用いてレーザ光を走査する3次元形状測定装置において、使用開始から長期間が経過してもミラーの回転角度を精度よく取得でき、測定精度を一定に保つことができるようにする。
【解決手段】
回転可能に支持されたミラー14aと供給される電気信号に応じてミラー14aを回転させて変位させる駆動回路とが一体的に形成された第1ミラー14を設ける。ミラー14aは、それぞれレーザ光を反射可能な第1反射面及び第2反射面を有する。第1反射面に測定装置と測定対象物OBとの距離を測定するためのレーザ光を照射する。第2反射面にミラー14aの回転角度を検出するためのレーザ光を照射する。第2反射面からの反射光を受光する受光センサ26を設ける。受光センサ26における反射光の受光位置からミラー14aの回転角度を計算するミラー角度検出回路42を設ける。
(もっと読む)
露光装置及びその制御方法、デバイスの製造方法、コンピュータ可読メモリ、プログラム
【課題】露光装置及びその制御方法において、基板上の複数のショット領域のそれぞれに対して、原版のパターンを位置合わせする際の位置合わせ精度を落とすことなく、スループットを向上させる。
【解決手段】ショット補正パラメータの自動計測を行うかどうかを判断し(S602)、計測を行う場合にのみ、ショット補正パラメータの自動計測を行うことで処理を減らす(S603)。その後、ウエハ補正パラメータの自動計測を行い(S604)、ショット補正パラメータの自動計測を行ったかどうかに応じて、ショット補正パラメータとウエハ補正パラメータとの相対パラメータδを算出するか(S606)、記憶してある相対パラメータδ及びウエハ補正パラメータからショット補正パラメータを算出するか(S607)を判断することで、位置合わせの精度を保つ(S605)。得られたショット補正パラメータとウエハ補正パラメータとに応じて、装置ユニットを駆動し(S608)、露光する(S609)。
(もっと読む)
ナビゲーション装置
【課題】カメラからの映像を、地図情報と自車位置とのマップマッチング以外の用途にも利用することが可能なナビゲーション装置を提供する。
【解決手段】自車両の周辺を撮像し撮像信号を出力するリアカメラ24と、自車両の走行状態を表す信号を出力する振動ジャイロ14aおよび速度センサ14bと、リアカメラ24が出力する撮像信号に基づいてキャリブレーション情報を演算する演算部35と、キャリブレーション情報に基づいて、振動ジャイロ14aおよび速度センサ14bのキャリブレーションを行うキャリブレーション部36とを備えるナビゲーション装置。
(もっと読む)
基板加工およびアライメント
【課題】基板の加工領域の位置に関する位置情報をアライメントマークに関連させて取り出し、アライメントと実際の加工とを切り離して基板を効率的に製造する方法を提供する。
【解決手段】基板(5;42)は、基板(5;42)に対して固定されたアライメントマーク(6a、6b;12a…d;44a…c)が設けられ、基板(5;42)を加工する前に、基板(5;42)の加工領域の位置に関する位置情報がアライメントマーク(6a、6b;12a…d;44a…c)に関連させて取り出された場合に、アライメントと実際の加工とを切り離すことによって効率よく製造することができる。この場合に、アライメントは、加工時にアライメントマーク(6a、6b;12a…d;44a…c)の位置を1回だけ再測定し、加工領域の位置に関する保存された位置情報を使用することにより行うことができる。
(もっと読む)
物品認識装置及びこれを用いた物品処理装置
【課題】認識対象物品の位置及び姿勢に関する配置情報を高精度に認識する。
【解決手段】認識対象物品1に設けられ、中心位置Cから周囲に向かって濃度パターンPcが順次変化するように形成される単位パターン印13を予め決められた位置関係で四以上有する認識表示体12と、認識対象物品1に対向配置されて認識表示体12を撮像する撮像具5と、この撮像具5の撮像面とこの撮像具5の視野範囲に入る認識対象物品1に設けられる認識表示体12面とが正対しない非正対計測位置P2に少なくとも撮像具5を設置可能とするように撮像具5を支持する支持機構6と、非正対計測位置P2に配置された撮像具5にて撮像された認識表示体12の撮像情報を少なくとも用い、認識対象物品1の位置及び姿勢に関する配置情報を認識する配置情報認識部7と、を備える。また、この物品認識装置を用いた物品処理装置をも含む。
(もっと読む)
算出装置、プログラム及び算出方法
【課題】適切に角度を算出することが可能な算出装置等を提供する。
【解決手段】撮像装置2は回転する針を有するメータを撮像する。算出装置1はメータを撮像した画像を取得する。検出部は、取得した画像からエッジを検出する。抽出部は、検出部により検出したエッジに対しハフ変換を行い複数の線を抽出する。算出部は抽出部により抽出した複数の線に基づき、各線の角度を算出する。算出部は、各線の角度から、メータの針の角度を算出する。算出装置1は算出した針の角度を情報処理装置3、3、・・・へ出力する。
(もっと読む)
パターンアライメントを行うための方法および装置
ダイが載置されたワークピースを直描書き込みマシン内においてパターニングする方法。前記ダイの配置および配向の位置の測定データと、前記書込器座標系に相対する前記ワークピースの配置および配向とを用いて、前記直描書き込みマシンの座標系内に規定された変換位置への前記測定された位置の変換を決定する。選択されたダイまたはダイ群と関連付けられたパターンデータを、調節された回路パターンデータに変換する。前記変換は、前記元々のパターンデータと、前記変換された位置との双方に基づいて行われる。前記調節された回路パターンデータは、前記調節された回路パターンが前記ワークピース領域の複数の小領域に適合するように前記複数のダイまたはダイ群の回路パターンを表す。前記ワークピース上に分配された前記複数のダイ間のダイまたはダイ群と各小領域が関連付けられる。その後、前記調節された回路パターンデータに従って、前記ワークピース上にパターンを書き込む。 (もっと読む)
変位量計測装置、及び、変位量計測装置の姿勢角決定方法
【課題】高速な振動現象の下にあっても、エンジンマウントのマウント軸として配設されるボルトの中心の3軸並進量、及び、該ボルトの2軸回転量を高精度に算出することができる、変位量計測装置、及び、変位量計測装置の姿勢角決定方法を提供する。
【解決手段】エンジンマウント10のマウント軸であるボルト12の両端に固定した、半径が既知である2個の球体13・13の変位を、それぞれについて3箇所ずつレーザー変位計31〜33、34〜36で計測する球体変位計測工程と、球体変位計測工程で計測した球体13・13の変位結果に基づいて、球体13・13の中心I・Jの3次元座標X1・X2をそれぞれ算出する座標算出工程と、座標算出工程で算出した2個の3次元座標X1・X2に基づいて、ボルト12の中心Kの3軸並進量、及び、ボルト12の2軸回転量θ・φを算出するマウント軸変位算出工程とを備える。
(もっと読む)
ヘテロダインレーザー干渉測長器
【課題】測長結果から精度よくデッドパスの影響を排除するヘテロダインレーザー干渉測長器を提供する。
【解決手段】ヘテロダインレーザー光源10からのビームを2本の物理的に離れた平行なレーザービームに分岐させて測定ビームB1と参照ビームB2を生成する分岐器80と、測定ビームB1及び参照ビームB2を測定光路LP1,LP2に向けて分割する偏光ビームスプリッタ30と、測定光路LP1,LP2に設けられる1/4波長板31,32と、可動測定物50に仮想直線上にお互いの反射面を反対方向に向けて固定され、測定ビームB11,B12が照射される測定ミラー341,342と、測定ミラー341,342近傍に配置され、参照ビームB21,B22が照射される反射ミラー411,412と、測定ミラー341,342の反射光を干渉させた光と反射ミラー411,412の反射光を干渉させた光に基づく2つのビート信号から変位を算出する演算回路70を備える。
(もっと読む)
部品検査装置及びプログラム
【課題】複数の部品が任意に配置されている場合であっても、部品の配置による見え方の相違を吸収して大きさや形状等の外観を検査する。
【解決手段】複数の部品を撮影した画像をブロブ処理し、抽出されたエッジから求まるエッジ接線ベクトルを用いてエッジ接線画像に変換し、サンプルエッジ接線画像に対するマスターエッジ接線画像の畳み込み処理により抽出された個々のブロブに基づいて、マスター部品の所定部位のサイズ、位置xm、及び角度θmを定めたテーブルを用いて、検出されたサンプル部品の位置xs及び角度θsに対応するサイズを補完計算して、検出されたサンプル部品の所定部位のサイズと比較して、サンプル部品を検査する。
(もっと読む)
移動体駆動方法、移動体装置、露光方法及び露光装置、並びにデバイス製造方法
干渉計(16)(干渉計システム(118))の出力信号(FIY)とエンコーダ(70A)(エンコーダシステム(150))の出力信号(FEY)とをそれぞれハイパスフィルタ(Hfc)とローパスフィルタ(Lfc)とを通して合成して得られるハイブリッド信号(FHY)を用いてステージを駆動(位置制御)する。カットオフ周波数(fc)は、走査露光時におけるステージの速度より僅かに小さい速度に対応する周波数に定められる。これにより、走査露光時には線形計測性の高い干渉計を、ステッピング時には計測再現性の高いエンコーダを、それぞれ用いてステージが駆動される。  (もっと読む)
(もっと読む)
3次元視覚センサにおける計測有効領域の表示方法および3次元視覚センサ
【課題】設定された有効領域の立体形状を周囲との関係とともに簡単に表示できるようにして、3次元視覚センサの利便性を高める。
【解決手段】ステレオカメラのうちの1つをワークWの支持面を正面視する状態に設定して、このカメラにより生成された画像を表示し、計測処理を有効にする領域を矩形枠により範囲指定する。また高さ計測範囲の上限値および下限値を指定する操作を受け付ける。各指定が確定されると、矩形枠Rが設定された画像の各構成画素にz座標として0を設定し、矩形枠に対応する座標に、高さ計測範囲の上限値に基づくz座標と下限値に基づくz座標とを設定する。そして、これらの設定により生成された3次元情報を、ユーザにより設定された視線方向から透視変換し、生成された投影画像をモニタに表示する。
(もっと読む)
露光装置及びデバイス製造方法
露光装置は、第1方向に延在するカ゛イト゛部材を有し、第1駆動装置の駆動により第1方向と略直交する第2方向に移動する第1移動体と、カ゛イト゛部材に沿って第1方向に独立して移動自在に設けられ、第1移動体の移動によりカ゛イト゛部材とともに第2方向に移動する一対の第2移動体(WCS)と、物体(W)を保持するとともに、一対の第2移動体により、少なくとも第1方向、前記第2方向を含むとともに光学系の直下の第1位置を含む二次元平面内で移動自在に支持される保持部材(WFS)と、一対の第2移動体に対して第2方向に沿って隣接して配置され、第1駆動装置の少なくとも一部を共用する第2駆動装置の駆動により、一対の第2移動体に支持された保持部材とともに第2方向側の端部で近接又は接触した状態を維持して第2方向に平行な方向に移動して、保持部材上の物体と光学系との間に液体が保持される第1の状態から、光学系との間で液体を保持する第2の状態に遷移させる液体保持部材(MST)と、を有する。 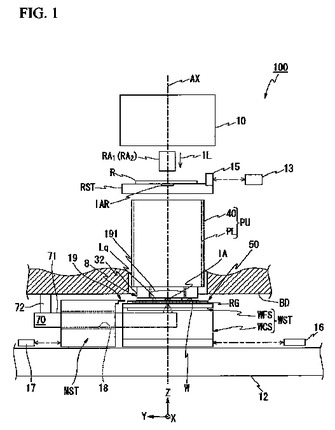 (もっと読む)
(もっと読む)
3次元視覚センサ
【課題】3次元視覚センサから出力される座標や回転角度がロボットの制御に適合するものになるように、3次元モデルのモデル座標系を変更する。
【解決手段】3次元認識のために作成された3次元モデルおよびその基準の姿勢を示すモデル座標系を透視変換して両者の関係を表す投影画像を生成し、投影画像を含む作業画面を立ち上げる。この画面の作業領域204,205では、投影画像中の原点Oの座標やX,Y,Zの各軸の回転角度RTx,RTy,RTzを表示して、これらの値を変更する操作を受け付ける。変更操作が行われると、投影画像の表示もこれに応じて変化する。また、変更後に画面下のOKボタン208が操作されると、作業領域204,205に表示されている座標や回転角度が確定されて、これらの値に基づきモデル座標系が変更される。3次元モデルの各構成点の座標も、変更後のモデル座標系による座標に変換される。
(もっと読む)
回転・傾斜計測装置および方法
【課題】物体に簡便で小型な反射センサーを取り付け、回転・傾斜を精密にリモート計測する方法を提供する。
【解決手段】リモート観測方向に設置固定された偏光検知器と、物体に取り付ける反射センサーと、該反射センサーに円偏光を照射する光源装置から成り、且つ、該円偏光の照射角度範囲の設定によって、該反射センサーで所定の範囲の入射角度分布で正反射せしめ、その正反射せしめることで、該正反射光束を偏光反射の既知の入射角依存性に従う所定の空間分布の発散する楕円偏光光束を成さしめ、その楕円偏光光束を検出して、リモート観測方向へ向かう光線成分の偏光楕円から該反射センサーのリモート観測光軸周りの回転角θと観測光軸と成す傾斜角φを計測する。
(もっと読む)
41 - 60 / 273
[ Back to top ]