
Fターム[2F065CC27]の内容
光学的手段による測長装置 (194,290) | 対象物−個別例 (8,635) | 電子部品関連 (997) | ボンディングワイヤ;リード (37)
Fターム[2F065CC27]に分類される特許
1 - 20 / 37
ワイヤーボンドの三次元位置決め方法及び装置
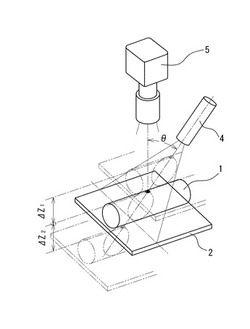
【課題】微小径ワイヤーボンドの接合状態の良否検査に先立ち、当該ワイヤーボンドの三次元的位置決めを迅速且つ精確に行うことができるワイヤーボンドの三次元位置決め方法及び装置を提供することを課題とする。
【解決手段】カメラ5とラインレーザー3、4を用いて、可動ステージ2上に載置されたワイヤーボンド1の三次元位置決めを行うための方法であって、 ラインレーザー3、4を、カメラ5の向きに対して角度を持たせて配置することにより、照射されたレーザーラインがワイヤーボンド照射部分において他の照射部分と一直線状にならないようにし、カメラ5で取り込んだレーザーラインが照射された状態のワイヤーボンド1の画像データにおいて、ワイヤーボンド1上におけるレーザーラインの位置と基準位置とのずれとラインレーザーの傾斜角度とから演算して求めた数値を基に、可動ステージ2を移動制御する
(もっと読む)
外観検査装置及び外観検査方法

【課題】被検査体の高さを少ない撮像回数で求める。
【解決手段】外観検査装置10は、周期的に明るさが変化する第1縞パターンを異なる複数の位相で被検査体に投射して複数の第1投影画像を撮像する。外観検査装置10は、第1縞パターンとは異なる周期で明るさが変化する第2縞パターンを異なる複数の位相で被検査体に投射して複数の第2投影画像を撮像する。外観検査装置10は、第2縞パターンに対応する被検査体の計測点の明るさ変動の位相を、第1投影画像及び第2投影画像における当該計測点の明るさと、第1縞パターン及び第2縞パターンのそれぞれに対応する明るさ変動の既知の関係とに基づいて求める。
(もっと読む)
外観検査装置及び外観検査方法
【課題】検査ウインドウを自動的に精度よく設定する。
【解決手段】外観検査装置10は、基板と該基板に実装されている部品とを備える被検査体12を撮像して得られる被検査体画像を使用して被検査体12を検査する。外観検査装置10は、被検査体12にパターンを投射する投射ユニット26と、パターンが投射された被検査体12のパターン画像に基づいて被検査体12の表面の高さ情報を生成する高さ測定部32と、高さ情報を用いて特定される被検査体画像上での部品の配置に基づいて被検査体画像に検査ウインドウを設定する検査データ処理部34と、を備える。
(もっと読む)
線形状物高さ計測装置、該装置に用いられる線形状物高さ計測方法及び線形状物高さ計測制御プログラム
【課題】線形状物の反射光を取り込んで作成した画像データから背景の影響を受けずに線形状物の高さを正確に検出する線形状物高さ計測装置を提供する。
【解決手段】照明13により、線形状物11(検査対象物)に入射光iが照射され、カメラ14により、反射光jが取り込まれて画像データが生成される。入射光iと反射光jとの軸は、ほぼ一致するようになっている。濃淡画像記憶部17により、カメラ14で生成された画像データが、濃淡画像データとして記憶される。線形状物検出部18により、濃淡画像データに基づいて線形状物11が検出される。高さ計測領域決定部19により、線形状物検出部18で検出された線形状物11の情報に基づいて、同線形状物11の占有領域を超えないように線形状物高さ計測領域が決定される。高さ計測部20により、線形状物高さ計測領域の濃淡情報に基づいて、線形状物11の高さが計測される。
(もっと読む)
露光装置及び露光方法、並びにデバイス製造方法
【課題】移動体を精度良く駆動する。
【解決手段】 移動体RSTのY軸方向の位置情報を、干渉計16yと、該干渉計に比べて計測値の短期安定性が優れるエンコーダ((24A,26A1)、(24B,26B1))とを用いて計測し、その計測結果に基づいてエンコーダの計測値を補正する補正情報を取得するための所定の較正動作を実行する。これにより、干渉計の計測値を用いて、その干渉計に比べて計測値の短期安定性が優れるエンコーダの計測値を補正する補正情報が取得される。そして、エンコーダの計測値と前記補正情報とに基づいて、移動体をY軸方向に精度良く駆動する。
(もっと読む)
部品認識装置、表面実装機および部品検査装置
【課題】QFPのリードやBGA,CSPの半球状端子の高さのばらつきの検出精度をより一層向上させることができるようにする。
【解決手段】実装用部品Dのリードや半球状端子を第1のカメラ36によって斜め方向から撮像する。実装用部品Dを垂直な軸線回りに所定角度だけ回転させた後に、前記第1のカメラ36によって前記リードや半球状端子を斜め方向から撮像する。これらの二つの斜め画像に基づいて画像処理によりリードや半球状端子の高さを検出する。前記第1のカメラ36は、撮像素子としてラインセンサをそれぞれ使用しているものである。このラインセンサのラインの方向は、実装用部品Dを撮像するときに実装用部品Dが移動する方向とは直交する方向である。
(もっと読む)
形状検査装置および形状検査プログラム
【課題】物体の形状を簡易な構成にて効率的に検査する。
【解決手段】形状検査装置100の位置制御部122は、光源を移動させることにより、検査対象となるSIPのピンから光源に向かう方向である光源方向を変化させる。位置特定部124は、ピンから反射される光の方向(反射方向)と、ピンから視点に向かう方向(視点方向)が一致するときの光源の位置を特定する。このとき、光源の移動速度と光源の移動時間に基づいて光源の位置を計算する。平面傾斜算出部130は反射方向と視点方向が一致するときの視点方向と光源方向に基づいて、ピンの傾きを算出する。
(もっと読む)
ワイヤボンディング装置及びキャピラリの振幅測定方法
【課題】ワイヤボンディング装置において、簡便な方法でキャピラリの振幅測定精度を向上させる。
【解決手段】静止中のキャピラリの画像の輪郭を取得する第1の輪郭取得手段と、キャピラリを無負荷状態で発振させ、発振中のキャピラリの画像を撮像素子で取得し、取得した画像の各ピクセルのグレーレベルを検出し、互いに隣接する予め設定された閾値よりも小さいグレーレベルの第1のピクセルと閾値よりも大きいグレーレベルの第2のピクセルとを選択し、第1のピクセルと第2のピクセルとのグレーレベルを補間してグレーレベルの閾値に対応する画像上の点の座標位置をサブピクセル単位で算出し、発振中のキャピラリの画像の輪郭を取得する第2の輪郭取得手段と、静止中のキャピラリの画像の輪郭と発振中のキャピラリの画像の輪郭との差からキャピラリの振幅を算出する振幅算出手段とを有する。
(もっと読む)
高さを測定する方法及び高さ測定装置
【課題】対象物における微小な高さを測定するに際し、測定に要する時間を短くし、ケース内のICの検査を可能にし、繰り返し測定精度を高め、測定装置の構成を簡易なものとする。
【解決手段】光軸に関して対称的に配設された1対の異なる色のフィルターF1,F2が設けられたフィルター付マスクMと撮像用レンズLとを備えた撮像用光学系を有する撮像装置で対象物をその基準表面に対して合焦させて撮像し、得られた画像について画像解析を行い、画像における対象物の凸部または凹部についての異なる色で分離した像の重心位置の間隔を算出する。一方で、この異なる色で分離した像の重心位置の間隔と凸部の高さまたは凹部の深さとの比例関係を表す換算係数を予め求めておき、この換算計数と実際に撮像により得られた重心位置の間隔とから凸部の高さまたは凹部の深さを求める。
(もっと読む)
外観検査装置
【課題】一つの撮像手段による簡易な装置構成によって、デバイスの外観検査項目を網羅的に実施可能な外観検査装置を提供する。
【解決手段】撮像手段であるカメラ2と、照明手段3と、4つのミラー4とからなる。カメラ2は、ターンテーブルに設けられた吸着ノズルNの垂直方向(Z軸方向)に光軸を持つように、デバイスの底面に対向する位置に設けられている。ミラー4は、図2(b)に示すように、搬送されてくるデバイスDの停止位置において、そのデバイスの周囲を囲むように四方に設けられている。すなわち、デバイスDのリードが設けられた2面に対して平行に2つのミラー4a及び4bを設け、さらに、リードが設けられていない2面に対して平行に2つのミラー4c及び4dを設けている。
(もっと読む)
ダイボンディングフィルムの表面検査方法及び表面検査システム
【課題】ダイボンディングフィルム表面の凹凸欠陥の発生状態を十分に効率的且つ高い精度で評価できる表面検査方法及び表面検査システムを提供すること。
【解決手段】本発明に係る表面検査方法は、ダイボンディングフィルムの表面における凹凸欠陥の発生状態を検査するためのものであって、ダイボンディングフィルムの表面に光を照射する光照射工程と、ダイボンディングフィルムからの反射光の強度を受光手段によって検出する光強度検出工程と、受光手段の出力信号に基づいてダイボンディングフィルムの表面における凹凸欠陥の発生状態を演算して定量化する演算工程とを備える。
(もっと読む)
三次元検査システム
【課題】電子リード線を含む対象物を三次元で検査する手法を提供する。
【解決手段】透明な焦点板(20)の上に設置された精密パターン・マスク(図4)の画像を作成するためのカメラ(10)を含む、プリント基板および集積回路を検査するための部品検査および校正方法。小形の部品(30)が、検査のために、透明な焦点板(20)の上に接触状態で、または浮いた状態で設置される。頭上のミラーまたはプリズム(40)は、上記カメラ(10)により検査中の、上記部品(30)の側面図を反射する。部品(30)の像は、三角測量により計測され、システムの寸法を校正することができる。ドット・パターンを含む精密焦点板マスク(図4)は、校正に必要なもう一組の情報を提供する。一つ以上のドット・パターンを画像化することにより、反復三角測量法により、喪失状態値を解決することができる。システムの光学系は、追加の焦点素子を使用しなくても、すべての斜視図に対する画像に焦点を結ぶように設計されている。
(もっと読む)
画像認識カメラのキャリブレーション方法、部品接合方法、部品接合装置および校正用マスク
【課題】簡単な構成で、画像認識カメラのキャリブレーションを精度良く行うことができる画像認識カメラのキャリブレーション方法を提供する。
【解決手段】基準マークMa,Maを形成した透光性の校正用マスク31を用い、画像認識カメラ6により、上昇待機位置S2に移動した校正用マスク31の基準マークMa,Maを位置認識する第1マーク認識工程と、第1マーク認識工程の後に、校正用マスク31を降下させワークテーブル4にセットするマスクセット工程と、マスクセット工程の後に、画像認識カメラ6により校正用マスク31の基準マークMa,Maを、位置認識する第2マーク認識工程と、第1マーク認識工程および第2マーク認識工程においてそれぞれ位置認識した2つの認識結果に基づいて、校正データを取得する校正データ取得工程と、を備えた。
(もっと読む)
画像認識カメラのキャリブレーション方法、部品接合方法および部品接合装置
【課題】簡単な構成で、画像認識カメラのキャリブレーションを精度良く行うことができる。
【解決手段】基準マークMa,Maを形成した透光性の校正用マスク31を用い、所定の位置に移動した画像認識カメラ6により、保持ヘッド2に保持され上昇待機位置S2に移動した校正用マスク31の基準マークMa,Maを、一方の鏡筒21,22を介して位置認識すると共に、保持ヘッド2に保持され接合位置S1に移動した校正用マスク31の基準マークMa,Maを、他方の鏡筒21,22を介して位置認識するマーク認識工程と、マーク認識工程において位置認識した2つの認識結果に基づいて、校正データを取得する校正データ取得工程と、を備えた。
(もっと読む)
実装部品用検査装置および実装部品の検査方法
【課題】実装部品の検査を容易に行うことが可能な実装部品用検査装置および実装部品の検査方法を提供する。
【解決手段】実装部品10を載置可能な平坦支持面21Aを有する透光性支持板21と、前記透光性支持板21を透かして前記突出部11,12を下方から照明する照明体25と、前記平坦支持面21Aの側縁を含んで前記突出部11,12を側方から見た側方画像と、前記突出部11,12を上方から見た上方画像とを撮像可能な撮像手段と、前記側方画像に基づいて前記突出部11,12の最下端と前記平坦支持面21Aの側縁との間のギャップを測定し、また前記上方画像に基づいて前記突出部11,12の前記平坦支持面21Aの板面方向における位置関係を測定する測定手段と、を備える。
(もっと読む)
ボンディング装置用撮像装置及び撮像方法
【課題】ボンディング装置用撮像装置において、高さ方向の段差の大きな半導体チップを精度良く撮像すると共にリードフレームの撮像時間の短縮を図る。
【解決手段】高倍率レンズ34を経て複数の撮像面36,37に至り、高倍率レンズ34からの距離が異なる位置にある複数の被写体撮像範囲に対応して高倍率レンズ34から各撮像面36,37までの各光路長が異なる第1、第2の高倍率光路51,52を有する高倍率光学系と、低倍率レンズ35を経て撮像面38に至る低倍率光路53を有し、各高倍率光路51,52よりも広い視野を備える低倍率光学系と、を備え、高倍率光学系の各撮像面36,37を持つ各撮像素子31,32は半導体チップ63の画像を取得し、低倍率光学系の撮像面38を持つ撮像素子33はリードフレーム61の画像を取得する。
(もっと読む)
クラスタ生成装置、欠陥分類装置、クラスタ生成方法およびプログラム
【課題】欠陥を高速かつ容易に検出し、分類する手法を提供する。
【解決手段】欠陥分類装置では、基板上の検査領域の画像データから複数の欠陥要素が特定され、各欠陥要素の代表点の座標値が取得される。欠陥要素ペア決定部53では各欠陥要素の代表点を母点としてドローネ三角形分割を行い、複数の三角形を構成する各辺の両端点の欠陥要素により構成される欠陥要素ペアが求められる。判定部52では、同一欠陥に由来する欠陥要素により構成される複数の欠陥要素ペアが取得される。クラスタ生成部56では、2分探索木の構造を有し、それぞれが同一の欠陥に由来する欠陥要素の集合である複数のクラスタが生成される。そして、各クラスタに含まれる欠陥要素を包含する欠陥画像が抽出されて特徴量が算出され、各クラスタに対応する欠陥が分類される。これにより、欠陥が高速かつ容易に検出され、適切に分類される。
(もっと読む)
リード端子検査方法およびリード端子検査装置
【課題】簡単な構成で容易かつ高精度に効率良くリード端子の良否判定を行なうことが可能なリード端子検査方法、およびリード端子検査装置を提供する。
【解決手段】電子チューナ1は、筐体1cの一面に外部の配線基板などに接続される複数のリード端子1tが一定の配列方向(通常は、例えば直線状)で配置してある。電子チューナ1のリード端子1tに光センサ10が備える発光部11から照射光線LBiaを照射し、リード端子1tからの反射光線LBrを光センサ10が備える受光部12で検出することによってリード端子1tの形状状態を検査する。光センサ10は、照射方向でのリード端子1tの幅Wt以下の光線径φbを有する照射光線LBiaをリード端子1tの検出対象先端位置Ldetに照射してリード端子1tからの反射光線LBrを検出し、計数部20aで計数する。
(もっと読む)
透明樹脂の検査方法および検査装置
【課題】光結合素子の製造工程において使用できて、非破壊検査であって、検査精度が高く、検査タクト・設備調整時間が十分短く、検査コスト・設備コストが低くできる上に、材料コストの増大を防止でき、また、デバイスを覆う透明樹脂に使用しても、デバイスへの悪影響の発生を防止できる透明樹脂の検査方法を提供する。
【解決手段】リードフレーム2の一表面上に略半球形状の透明樹脂4を塗布形成して、略半球形状の透明樹脂4を硬化させた後、略半球形状の透明樹脂4に光を照射しながら、略半球形状の透明樹脂4からの反射光をCCDラインセンサカメラ13で受ける。CCDラインセンサカメラ13がその反射光に基づいて作成した画像データによって、透明樹脂4の塗布量を判定する。
(もっと読む)
リード線位置検出方法および装置
【課題】電子部品のリード線位置の検出精度を向上させる。
【解決手段】第2ミラー部23には、第1照明部24から第1ミラー部22を介して、電子部品1のリード線2の影響を受けた光が入る。同様に、第1ミラー部22には、第2照明部25から、第2ミラー部23を介して、電子部品1のリード線2の影響を受けた光が入る。撮像部26は、第1ミラー部22と第2ミラー部23に写された画像を2次元データとして取得する。制御装置19は、撮像部26のデータと第1,第2ミラー部22,23の成す角度情報より、リード線位置の演算を行う。電子部品1のリード線2の位置を対象部品等の回転誤差の影響なしに高精度に検出することができる。
(もっと読む)
1 - 20 / 37
[ Back to top ]