
Fターム[2F065FF06]の内容
光学的手段による測長装置 (194,290) | 測定方法 (22,691) | 画像計測、写真計測 (6,129) | モアレ縞 (294)
Fターム[2F065FF06]の下位に属するFターム
格子投影 (130)
格子照射(実体格子) (29)
Fターム[2F065FF06]に分類される特許
121 - 135 / 135
回転工具の振れ測定方法およびその測定装置

【課題】 高速回転する回転工具の振れが,加工形状精度の劣化を来すため,回転工具の切れ刃稜の振れを高精度に測定可能にし,この振れを補正できるようにする.
【解決手段】 光源モジュールと,回転工具の切れ刃稜の中心と,共焦点をもつ2個のレンズと,撮像素子を,共通する一つの光軸上にこの順に並べ,該レンズの他の2つの焦点のうち,光源モジュール側の焦点には切れ刃稜のボール中心を,もう一方の焦点には撮像素子を,また共焦点にはアンチピンホールフィルタを配置し,撮像素子から得られた電気信号をパソコンに導入して,切れ刃稜のエッジ像の鮮明度を向上させている.
(もっと読む)
3次元計測方法および3次元計測方法をコンピュータに実行させるプログラム

【課題】 パラメータの設定を簡単にでき、ユーザの負担を大幅に軽減できる3次元計測方法および3次元計測方法をコンピュータに実行させるプログラムを提供する。
【解決手段】 観察系の倍率、測定対象物体の最大測定範囲、測定精度と測定速度の度合いのそれぞれについて設定されたパラメータに基づいて液晶格子604の格子ピッチが求められ、該格子ピッチで生成された液晶格子604のパターンを用いて標本3からの変形格子パターン像をTVカメラ13で撮像するとともに、液晶格子604を数段階シフトさせながら各位置毎の撮像画像を取得し、該取得した各位置毎の撮像画像から位相を求めるとともに、該位相と予め用意された前記倍率、最大測定範囲、測定精度と測定速度の度合いに対応する基本位相との差分を用いて高さを求め、この結果を表示部174に表示する。
(もっと読む)
保持歪み測定方法および装置
【課題】フォトマスク等の板状の被検体を所定の保持状態で保持した際に、その保持状態に起因して被検体に生じる保持歪みを被検面の形状とは別に測定し得るようにする。
【解決手段】所定の保持状態で保持された被検体40の表面41の形状を測定する第1測定と、同状態で保持された被検体40の裏面42の形状を測定する第2測定と、逆歪みが生じるように保持された被検体40の裏面42の形状を測定する第3測定とを行なう。第1測定により得られた表面形状データと、第2測定により得られた裏面形状データとに基づき第1のデータを得るとともに、第1測定により得られた表面形状データと、第3測定により得られた裏面形状データとに基づき第2のデータを得、これら第1、第2のデータに基づき保持歪みを求める。
(もっと読む)
検査表面の光学検査
1つの側面においては、強度における決定される変化に基づき、格子の異なる領域において強度データと共に使用される解像度を変化させることにより、Parousiameterのような散乱計100から得られる画像強度データを格納するのに必要なデータの量が削減される。別の側面においては、散乱計が、テストサンプルに対する鏡のオフセンタ変位によりもたらされる歪みを訂正するため、テストサンプル180を画像化する非球面鏡170,900,1000を具備する。別の側面においては、光学表面検査装置が、テスト表面上にパターン化格子1610を投影するため、テスト表面1420と照らし出されるパターン化格子1410との間の補助レンズ1440を用いる。カメラ1450は、実画像としてテスト表面上の格子に焦点が合わされる。 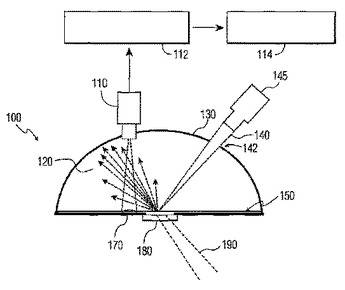 (もっと読む)
(もっと読む)
3次元計測方法とその計測装置
【課題】従来の3次元計測方法とその計測装置は、基準となるパラメータや平面が実際の平面サンプルとは異なっていたり、カメラノイズやコントラストのバラツキの存在によって精度が低くなったり、ハードウェアが複雑になるという問題がある。
【解決手段】本発明の位相シフト法による3次元計測方法は、測定前に基準サンプルを使用し全計測点について、基準サンプルにおける位相を測定し、前記基準サンプルにおける位相の位相接続処理を行い、その結果を誤差最小化処理し、得られた全計測点の位相を基準位相として求め、測定時測定対象物について算出した位相から基準位相を差し引くことによって測定対象物の高さを得る3次元計測方法とその計測装置である。
(もっと読む)
位相接続方法及びその装置並びに位相接続プログラム
【課題】位相接続時におけるノイズ等の影響によるエラー又はエラーの伝播を起こりにくくし、正確な位相接続処理を行うこと。
【解決手段】複数の位相シフト画像データから位相値データと振幅値データとを求め、振幅値データに対してマスキング処理する閾値を初期閾値t1から終了閾値tnまで変動幅Δt毎に順次低下し、これら閾値の変化毎に、当該各閾値よりマスクされなかった振幅値データの部分を位相接続可能と判断して順次位相接続処理を行うことを繰り返す。
(もっと読む)
3次元画像入力装置および方法
【課題】 ストライプパターンのストライプ幅を小さくしなくてもその幅方向の解像度を改善させる。
【解決手段】 ストライプパターンを初期設定にリセットし(S10)、プロジェクタ10から初期設定のストライプパターン(A)を被写体50に投影し(S11)、2台のカメラ20、30で撮影する(S12)。得られた画像から、ストライプエッジ上のポイントにおける距離情報が算出される(S13)。次にストライプパターンを2ピクセルシフトさせつつ同様に距離情報を算出する(S14、S15)。(B)〜(D)と繰り返して撮像を行いそれぞれのポイントにおいて距離情報算出を行う。最後にそれぞれ算出された距離情報(点群データ)を合成して最終的な出力を得る(S16)。
(もっと読む)
3次元形状測定装置
【課題】 安価な3次元形状測定装置を提供する。
【解決手段】 3次元形状測定装置は、被検体7に投影するパターンをGUI画像11としてPCモニタ2上に表示する、アプリケーションソフトウェア4を実行するPC本体1によって制御される。プロジェクタ装置5は、PCモニタ2の表示を投影する、市販の投影機であり、3次元形状測定装置として動作する場合、アプリケーションソフトウェア4によってPCモニタ2上に表示されたパターンをそのまま被検体7に投影する。アプリケーションソフトウェア4は、PCのモニタ画面2上にパターンを表示させるだけのものでよく、プロジェクタ装置5もPCのモニタ画面上の表示を投影する市販のものでよい。撮像装置6で、被検体7に投影されたパターンを撮像し、PC本体1で処理することによって、3次元形状を測定する。
(もっと読む)
3次元形状測定方法及びその装置
【課題】大きな被測定物であっても誤差の累積がなく、精度よく光学的に3次元測定できる3次元形状測定方法を得る。
【解決手段】カメラ4により被測定物1を撮像して、カメラ4の撮像領域S内の被測定物1の3次元形状を測定する。その際、被測定物1に沿って配置され複数のマークMが設けられた長尺状のリファレンスバー14,16と、カメラ4を移動可能に支持する移動機構18とを設ける。そして、移動機構18に支持されたカメラ4を移動して、異なる箇所で少なくとも2つのマークMを含む被測定物1を撮像した撮像領域Sのそれぞれの測定値をマークMに基づいて同一座標系に変換して、被測定物1の3次元形状を測定する。
(もっと読む)
透明物体の高さ測定
屈折率を有する略透明物体の高さを決定するための方法およびシステムを提示する。該方法は高速モアレ干渉計側に基づいており、ペリクルに投影された強度パターンに対応する物体の少なくとも1つの画像を得ることを含む。次いで該方法は、画像を用いて物体に関連付けられる位相を確立することを含み、かつ物体の位相、屈折率、および基準面に対応する基準位相を用いて高さを決定することを含む。 (もっと読む)
レーザビームに対する物体表面の位置及び整合を決定する方法及びシステム
発明は全般的には、交差軸に対する平面の位置及び整合を決定するため、及びその平面を基準面として用いる際の補正の実施を可能にするために既知の位置及び整合を用いるための、方法及びシステムに関する。さらに詳しくは、発明は、レーザビームに対する平坦表面の傾き角を決定するため、及び決定された傾き角をレーザビームに適用されるべき補正因子を計算するために用いるための、方法及びシステムに関する。略述すれば、方法及びシステムは、処置にレーザビームを用いる際に適用される、補正因子、zオフセットを最終的に計算する。  (もっと読む)
(もっと読む)
モアレパターンを用いてバンディングを検出するための方法及び装置
ピクセルから成る第1の複数の平行な線を含む第1の画像内の線間の間隔の変動の存在を求める方法であって、第2の複数の平行な線を含む第2の画像を提供することと、第1及び第2の複数の線が互いに対して角度を成して重ね合わせられることによって、モアレ干渉パターンを含む干渉画像を生成するように、画像の向きを定めることと、上記変動の存在を求めるためにモアレ干渉パターンを用いることとを含む。 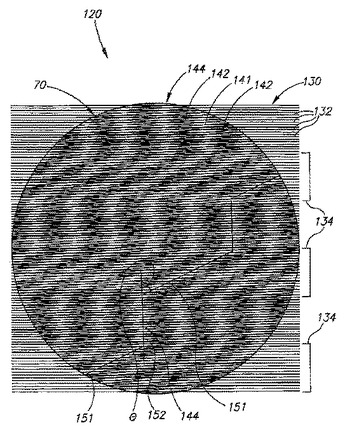 (もっと読む)
(もっと読む)
長寸の物体の方向パラメータを決定するための装置及び方法
【課題】 1若しくは複数の方向パラメータ及び特に先端が接点で表面に接触している長寸の物体の第2及び第3のオイラー角θ,ψを決定するためのステレオ視の原理を利用した装置及び方法を提供する。
【解決手段】 装置は、第1の視点から既知のパターンでプローブ放射線により表面を照明するための長寸の物体上に取り付けられた投光器と、第2の視点から表面から長寸の物体に戻るプローブ放射線の散乱部分を検出するための長寸の物体上に取り付けられた検出器とを有する。方向パラメータは、投射されたプローブ放射線によって生成される特徴部の形状と検出器によって検出される特徴部の形状との差などの、投射されたプローブ放射線と検出されたプローブ放射線の差から決定される。プローブ放射線のパターンは、1若しくは複数の方向パラメータの決定のための情報を供給するように選択され、線、楕円、矩形、多角形などの非対称パターン、または円、正方形、正多角形を含む対称の場合を含むことができる。パターンを生成するために、投光器は、ホログラフィック素子、回折素子、屈折素子、または反射素子及びこれらの任意の組合せなどの構造化された光学部品、または走査装置を用いることができる。本発明の装置は、ペン、鉛筆、またはスタイラスなどの筆記具の方向を決定するのに適している。
(もっと読む)
三次元ビデオスキャナ
少なくとも一つの波長を有する光を分析するための装置であって、光を偏向して光の少なくとも一つの波長に相当する少なくとも一つの波長依存角度を特徴とする偏向された光ビームを与える偏光器(12)と、偏向された光ビームを符号化して少なくとも一つの波長依存角度に相当する少なくとも一つの角度依存偏向状態を特徴とする符号化された光ビームを与えることができる符号器(20)と、符号化された光ビームを復号して光の少なくとも一つのスペクトル成分を決定するための復号器(24)とを含む。 (もっと読む)
投影縞技法を用いた光学ナビゲーションのためのシステム及び方法
光学ナビゲーションデバイスとナビゲーション地形との間の相対動作を決定するための方法(300)は、2つの重複するコヒーレントな光ビーム(204,206,236a,236b)を生成すること(303)と、該2つの重複する光ビーム間における干渉縞(237)のパターンを生成すること(304)とを含む。前記方法は、干渉縞のパターンによってナビゲーション地形の表面部分(22,212)を照らすこと(305)と、縞を照射された表面部分を撮像すること(306)と、前記撮像された、縞が照射された表面部分に応答して、信号114のパターンを生成すること(306,307)とを更に含む。 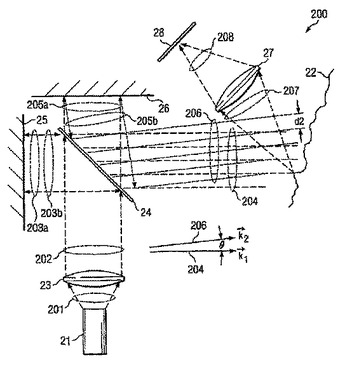 (もっと読む)
(もっと読む)
121 - 135 / 135
[ Back to top ]