
Fターム[2F065FF11]の内容
光学的手段による測長装置 (194,290) | 測定方法 (22,691) | 光レーダ法 (401)
Fターム[2F065FF11]の下位に属するFターム
Fターム[2F065FF11]に分類される特許
21 - 40 / 225
3次元形状測定装置
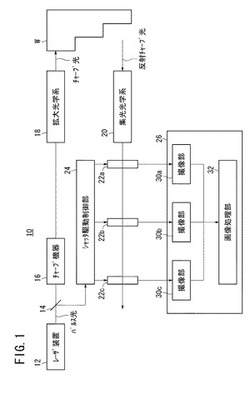
【課題】チャープ光の長さに依存することなく、奥行きの計測範囲を長くすることができる3次元形状測定装置を提供する。
【解決手段】3次元形状測定装置10は、波長が規則的に経時変化するチャープ光を生成して被測定物Wに対して照射するチャープ機器16と、被測定物Wを反射した反射チャープ光を所定タイミングで所定期間切り出す複数のシャッタ部22a、22b、22cと、複数のシャッタ部22a、22b、22cにより切り出された反射チャープ光と前記複数のシャッタ部22a、22b、22cの位置情報とを用いて、被測定物Wの複数領域の3次元情報を取得する3次元情報取得部26とを備え、複数のシャッタ部22a、22b、22cは、被測定物Wの基準位置に対して距離が異なるように設けられている。
(もっと読む)
測定補助器具およびそれを用いた直径測定方法

【課題】 円形材料等の測定対象物に対し、レーザトラッカーから見て反対側の面の空間座標を測定すること、並びに外周面における任意の高さ位置の空間座標を測定することを可能にする測定補助器具を提供する。
【解決手段】 測定補助器具20は、ターゲットTgを設置するターゲット設置部材21と、その下側に位置固定で設けられ測定対象物Wの上端面に接触させる上端面接触部材22と、その下方に配置され測定対象物Wの周面に接触させる周面接触部材23と、上面接触部材22に対する周面接触部材の高さを調整する高さ調整機構24とを備える。レーザトラッカー1により、測定対象物Wに設けられたターゲットTgにレーザ光Lbを照射し、その反射光からターゲットTgの空間座標を求める。求められた空間座標から、測定対象物Wの外周面における周面接触部材23との接触箇所の空間座標を得る。
(もっと読む)
形状認識装置、形状認識方法、および、そのプログラム
【課題】コネクタ等の固定部にケーブル等の可変部を加えた3次元モデルを通じて認識対象物を的確に抽出する。
【解決手段】形状認識装置120は、固定部と内部自由度を有する可変部とを含み長手軸を有する3次元モデル122を示す3次元モデル情報を保持するモデル保持部210と、認識対象物112の3次元形状を示す認識対象情報を取得する認識対象情報取得部230と、認識対象情報と3次元モデル情報とに基づき、長手軸に対して対称な2つの候補姿勢をつくり、認識対象物と、可変部の内部自由度を変化させた3次元モデルとをパターンマッチングして認識対象物の位置および姿勢を特定する認識対象物特定部234とを備える。
(もっと読む)
光学式検出装置、電子機器及び投射型表示装置
【課題】広い検出エリアにおいて検出精度の均一化ができる光学式検出装置、電子機器及び投射型表示装置等を提供すること。
【解決手段】光学式検出装置は、照射光LTを出射する照射部EUと、検出エリアRDETに存在する対象物OBにより照射光LTが反射することによる反射光LRを受光する受光部RUと、受光部RUの受光結果に基づいて、対象物OBの位置検出情報を検出する検出部110とを含む。照射部EUは、検出エリアRDETが設定される対象面SOBに対して斜め方向となる第1の面SF1と、対象面SOBに対して斜め方向となり、且つ、第1の面SF1よりも対象面SOBとの成す角が大きい第2の面SF2とにより規定される照射範囲に、第1の面SF1に沿う方向において第1の強度であり、第2の面SF2に沿う方向において第1の強度よりも強度が低い第2の強度である照射光LTを出射する。
(もっと読む)
位置検出システム、表示システム及び情報処理システム
【課題】 撮像装置のレンズ及び撮像素子を対象面と平行な方向に沿う方向に配置するこ
とで、撮像画像における歪みを抑止し、位置検出の精度を向上させる位置検出システム、
表示システム及び情報処理システムを提供すること。
【解決手段】 位置検出システム400は、撮像画像を撮像する撮像部500と、撮像部
500からの撮像画像に基づいて、対象面20に設定された検出エリアでの対象物OBの
座標情報を求める座標演算部430と、を含み、撮像部500は、レンズ部LEを有する
光学系と、撮像素子IMとを含み、撮像部500から対象面20の中央部へと向かう方向
である第1の方向と、対象面20のなす角度α1とし、レンズ部LEの光軸方向である第
2の方向と対象面20のなす角度をα2とした場合に、角度α1及び角度α2は、α1<
α2を満たす。
(もっと読む)
三次元データ処理装置、方法及びプログラム
【課題】三次元画像表示された対象物の視認性が向上する三次元データ処理技術を提供する。
【解決手段】三次元データ処理装置20は、対象物の表面に走査されたレーザの反射光を受光しその反射点の位置データの集合である点群データを生成する点群生成部21と、前記点群データ31の位置データにおけるピクセルの法線を導出する法線導出部22と、法線43に基づいてピクセルの輝度を演算する輝度演算部23と、ピクセルの前記位置データ及び前記輝度に基づいて対象物30の三次元画像を構成する3D画像構成部26と、を備える。
(もっと読む)
計測装置
【課題】簡単な構成で、試料を加熱しつつ正確に計測することが可能な計測装置を提供する。
【解決手段】計測装置は、試料Aを保持する位置または試料Aに対向する位置に配置され、透明基板121と透明基板121の表面に設けられた透明導電膜122を有する透明部材12と、試料Aを撮影する光検出部22と、透明部材12の透明導電膜122に印加する電圧を制御することにより、透明部材12の温度を制御する熱制御部42とを備える。
(もっと読む)
三次元計測治具及びこれを用いた三次元計測方法
【課題】棒状ワークの曲がり角度を簡単に計測することができるのに加えて、棒状ワークの計測部位毎の曲がり角度を記録に残すことが可能になる三次元計測治具及びこれを用いた三次元計測方法を提供する。
【解決手段】筒体や柱体等の棒状ワークの曲がり角度を計測するのに用いられる三次元計測治具であって、互いに合体してパイプWの外周に嵌合装着される一対の半円形治具構成体2,2を備え、一対の半円形治具構成体2,2には、レーザ光Lrの送受信を行うことで中心Rpの三次元座標が求められる球状のリフレクタRをスライド可能に保持する外向き溝2bが形成され、リフレクタRを保持する外向き溝2bは、パイプWの治具構成体2,2が装着される部位における断面を算出するのに必要な複数の位置を結んでパイプWの外周に沿ってそれぞれ形成されている。
(もっと読む)
3次元情報取得方法、3次元情報取得装置、および3次元情報取得プログラム
【課題】被写体を2次元で表現する画像に基づき被写体の3次元空間内における奥行きを示す3次元情報の検出精度を高めること。
【解決手段】3次元の対象物を2次元で表わす画像の画像データを入力する画像入力ステップと、前記画像データに基づき前記画像の特徴量を示す特徴量情報を、前記画像を複数個に分割した分割エリア毎に取得する特徴量取得ステップと、3次元の対象物を2次元で表わす画像内における任意のサンプリングポイント毎に、当該サンプリングポイントの画像の特徴量を示すサンプリングポイント特徴量情報と、仮想3次元空間において前記対象物を表現した場合の前記サンプリングポイント同士の水平方向の間隔を示す3次元情報とをそれぞれ対応付ける3次元情報テーブルを参照して、前記特徴量情報が示す前記分割エリアの画像の特徴量と対応する前記3次元情報を取得する3次元情報取得ステップと、を含むことを特徴とする。
(もっと読む)
姿勢検出装置
【課題】人物にマーカーを設置することなく、人物の姿勢を高精度で検出する。
【解決手段】各画素における輝度値がカメラから物体までの距離を示す距離画像を取得する距離画像取得部10と、前記距離画像取得部10が取得した前記距離画像に基づいて、三次元空間中での物体の座標を計算する座標計算部20と、前記座標計算部20が計算した物体の座標に基づいて、三次元空間中で所定の体積しきい値以上の体積を占める物体の領域である人物領域を決定する人物領域決定部30と、前記人物領域決定部30が決定した前記人物領域に、人体の骨格をモデル化した骨格モデルを当てはめることにより被写体人物の姿勢を検出する姿勢検出部40とを備える。
(もっと読む)
姿勢検出装置
【課題】被験者の姿勢を示す値を正確に算出する。
【解決手段】各画素における輝度値がカメラから被験者までの距離を示す距離画像を取得する距離画像取得部102と、距離画像取得部102が取得した距離画像に基づいて、被験者に貼付された複数のマーカーの三次元空間中での座標を算出する座標算出部104と、座標算出部104が算出した複数のマーカーの座標から、被験者の姿勢を示す値を算出する姿勢算出部106とを備える。
(もっと読む)
通過者識別装置
【課題】規定の場所を通過する通過者の外観形状を計測することによって通過者の体型を類別し、結果的に住宅内などの少人数の範囲内で個人の特定を可能にする。
【解決手段】距離センサ20は、特定面を通過する通過者の外観形状を計測した距離データを出力する。距離データ処理部31は、距離センサ20から出力された距離データを用いて通過者の胴囲を推定する機能を備える。登録情報記憶部34は、識別対象の人物の外観形状を当該人物に対応付けて記憶している。識別部35は、距離データ処理部31で推定した胴囲、身長、肩幅を、登録情報記憶部34に照合し登録情報記憶部34に登録された人物のうち類似度が判定条件を満たす通過者を選択する。
(もっと読む)
コンベヤスケール
【課題】 重量測定方式と非接触測定方式との両方の要素を備えることによって、被輸送物の輸送量を求めるというコンベヤスケール本来の機能を確実に保証しつつ、特に重量測定方式の要素に故障等の異常が発生したときに、これを簡単な構成で検知する。
【解決手段】 本発明のコンベヤスケール10は、計量ローラ18と2台のロードセル22および24とを含む重量測定系と、7個の非接触型距離センサ30〜42を含む非接触型測定系と、を備えている。重量測定系が正常なときは、当該重量測定系によって求められた被輸送物100の精確な輸送量が制御装置50のディスプレイに表示される。重量測定系に異常が発生したときは、非接触型測定系によって求められた副次的に精確な輸送量が表示される。なお、重量測定系が正常であるか否かは、重量測定系によって求められた輸送量と非接触型測定系によって求められた輸送量との比較に基づいて、判定される。
(もっと読む)
測定装置、位置測定システム、測定方法、較正方法及びプログラム
【課題】光を用いて物体までの距離を測定した測定結果において、所定の対象物に関する測定結果を特定することを可能とすること。
【解決手段】物体までの距離を光の照射によって測定点毎に測定する測定装置であって、測定点毎の距離情報と測定点毎の受光量情報とを取得する光学式距離測定部と、受光量情報において、光量が閾値を超える複数の測定点の並びが所定のパターンを形成している場合に、これらの測定点を、光源方向に対して多くの入射光を反射する反射面を有する対象物に対応する測定点であると判定する対象判定部と、判定された測定点の距離に基づいて、対象物の位置を測定する位置測定部と、対象判定ステップによって判定された測定点の距離に基づいて、自装置の基準点を原点とするローカル座標系における対象物の位置を算出し、同一の対象物のローカル座標系における位置及びグローバル座標系における位置に基づいて較正を行う較正部とを備える。
(もっと読む)
3次元環境復元装置、3次元環境復元方法、及びロボット
【課題】動的な環境下においても、効率的にマップ更新処理を可能とする。
【解決手段】3次元環境復元装置10は、環境を3次元で計測する環境認識センサ5と、計測された計測データから、観測物体の3次元形状を表す3次元点群を生成する3次元点群生成処理部11と、3次元環境を表現するデータ構造であって、当該3次元環境が格子領域に区切られて観測物体が存在する格子領域に直方体が配置された3次元環境マップを多段マップとして、生成された3次元点群データを用いて多段マップを時分割で生成し、当該生成した多段マップを記憶手段に規定時間分蓄積する時分割多段マップ生成/蓄積処理部12と、蓄積された規定時間分の多段マップと、新たに生成された多段マップと、を合成することで、新たな環境情報を反映させた全体多段マップを生成する全体多段マップ生成処理部13と、を備える。
(もっと読む)
光学式検出装置、電子機器及び光学式検出方法
【課題】対象物の位置情報を演算し、対象物のZ位置情報に応じて、コマンド処理とホバリング処理とを適切に切り替えることが可能な光学式検出装置、電子機器及び光学式検出方法を提供すること。
【解決手段】光学式検出装置は、面状領域に沿う領域に照射光を照射する照射部と、対象物に反射した照射光の反射光を受光する第1及び第2の受光部と、第1及び第2の受光部の少なくとも一方の受光結果に基づいて、対象物の位置情報を演算する演算部と、を備え、第1の受光部と面状領域との距離は、第2の受光部と面状領域との距離よりも小さく、第1及び第2の受光部は、面状領域に沿う方向から入射する反射光を受光する。
(もっと読む)
対象領域抽出装置
【課題】 距離情報データに含まれるノイズを除去等する。
【解決手段】 対象領域抽出手段B10は、センサB02から得られる輝度情報データに基づいて、所定以上の輝度の存在する隣接画素数がしきい値以下の部分を削除するための輝度情報マスクを生成する。輝度情報マスクを距離情報データに重ね合わせ、輝度情報マスクに重複する領域の距離情報データだけを抽出する。
(もっと読む)
撮像装置
【課題】測定対象物を測定しつつ画像を取得するとともに画像を所望の視線方向から観察できる撮像装置を提供する。
【解決手段】撮像装置1は、画像を取得する撮像素子18と、測定対象物Wの被照射領域W1に光線を照射する発光部26および光線を検出する受光部28を有し、発光部から被照射領域までの距離を測定する測定部20と、発光部の位置を測定する位置測定部21と、発光部の向きを測定する姿勢測定部22と、発光部の位置および向き並びに発光部から被照射領域まで距離に基づいて被照射領域の位置および向きを算出する領域状態算出部55と、画像から抽出画像を作成する画像切出し部54と、抽出画像を領域状態算出部により算出された位置および向きに対応付けて記憶する記憶部56と、仮想空間に位置および向きに基づいて配置された抽出画像を視線方向に基づいて変換した視線変換全体画像を作成し表示部に表示させる画像処理部57と、を備える。
(もっと読む)
屋外地物検知システム、屋外地物検知システム用プログラム、および屋外地物検知システム用プログラムの記録媒体
【課題】レーザ測量結果である点群と、指定された1枚のカメラ画像とに基づいて、対象となる地物に含まれる点群を特定し、特定した点群から地物の位置と大きさを検知する。
【解決手段】対象となる地物周辺の画像を格納するカメラ画像データ格納部(31)と、対象となる地物周辺のレーザ測量結果を点群として格納する点群データ格納部(32)と、対象となる地物周辺の画像をモニタ上に表示させる画面描画部(21)と、対象となる地物周辺の画像の中から地物の領域内に含まれる少なくとも1点を指定する点指定部(12)と、少なくとも1点に基づいて画像上の地物の領域を決定し、決定した領域に含まれる点群を点群データ格納部から抽出し、点群間の距離が一定距離以下のもの同士をグルーピングすることで地物に対応する点群を分離し、地物領域の位置と大きさを検知する地物検知処理部(22〜25)とを備える。
(もっと読む)
位置検出システム、そのデータ処理装置、そのデータ処理方法およびコンピュータプログラム
【課題】対象人物へのマーカーの装着などを必要とすることなく、極近距離でなくとも対象人物の頭部などの三次元位置を特定することができる位置検出システムを提供する。
【解決手段】位置検出システム100は、取得された測距画像データDGと温度画像データTGとを関連させて定温物質の三次元位置TPを特定する。このため、対象人物HMへのマーカーの装着などを必要とすることなく、極近距離でなくとも対象人物HMの頭部HUなどの三次元位置TPを特定することができる。
(もっと読む)
21 - 40 / 225
[ Back to top ]