
Fターム[2F065FF11]の内容
光学的手段による測長装置 (194,290) | 測定方法 (22,691) | 光レーダ法 (401)
Fターム[2F065FF11]の下位に属するFターム
Fターム[2F065FF11]に分類される特許
101 - 120 / 225
自己位置同定装置および該自己位置同定装置を備えた移動ロボット

【課題】より汎用的な環境において地図を用いずに自己位置を求めることができる自己位置同定装置および、該自己位置同定装置を備えた移動ロボットを提供する。
【解決手段】環境情報の特徴点を抽出する特徴点抽出部11と、連続する2フレーム間の特徴点集合を対応付ける特徴点対応部12と、対応点集合から自己移動量を計算する自己移動量演算部13と、自己移動量を座標変換して自己位置を求める位置変換部14と、自己位置を記憶する位置記憶部15と、デッドレコニング値を求めるデッドレコニング演算部16とを備えた自己位置同定装置において、環境認識センサからの計測データを元に環境情報の特徴線分を抽出する特徴線分抽出部17と、抽出された特徴線分から仮想特徴点を求める仮想特徴点抽出部19と、連続する2フレーム間の特徴線分集合を対応付ける特徴線分対応部18とを備える。
(もっと読む)
出来型確認システムおよび出来型確認プログラム、並びに出来型確認方法

【課題】 全体のデザインを損なうことなく意匠的な構造物を構築することができる出来型確認システムを提供する。
【解決手段】 出来型確認装置100は、3次元レーザスキャナ200を用いて第1層目の出来型の表面を計測することにより得られる点群データを入力し、入力した点群データに基づいて、その出来型の表面に対応する平面を推定する。そして、グローバル座標系において、推定平面と、構造物モデルのうち推定平面に対応する第1層目の設計計画面とが一致するように推定平面に対して第1〜第4層目の設計計画面を当てはめることにより、構造物モデルから壁10の予測形状を形成し、グローバル座標系において、構造物モデルのうち予測形状に対応する第1〜第4層目の設計計画面を基準形状として形成し、予測形状および基準形状を合成して表示する。
(もっと読む)
3次元形状計測装置および方法並びにプログラム
【課題】被写体にパターン光を照射することにより取得した画像を用いて、被写体の3次元形状を正確に計測する。
【解決手段】プロジェクタ4から所定方向に偏光されたパターン光を出射して被写体に照射する。被写体におけるパターン光の反射光は、フィルタ部14,15により所定方向に直交する方向に偏光されて、第1および第2のカメラ2,3に入射する。これにより、第1および第2のカメラ2,3が基準画像および参照画像を取得し、演算部5が画素の対応付けを行うことにより、被写体の3次元形状を計測する。
(もっと読む)
空間内部の位置を特定する方法及び装置
【課題】ボイラ火炉等の面で囲まれる空間の内部の検査に用い、基準点を床面に配置することが出来ない場合においても位置を特定することができる位置特定方法を提供する。
【解決手段】前側壁及び後側壁は互いに平行且つ左右側壁と直角の関係であり、前記前後左右側壁上には等間隔で平行に同形の突起物が複数設けられており、前記特定する空間内部の位置が前記側壁上であり、該位置に配置されたレーザを、上下方向それぞれにレーザを照射して、それぞれへの到達時間から、前記照射器から上壁、下壁それぞれへの距離を算出するとともに、前記照射器より、前記特定する位置が存在する側壁と直角な2つの側壁と直角となる2方向それぞれに、前記突起物間隔の1/2の間隔で2本のレーザを照射して、該2本のレーザの側壁又は突起物への到達時間及び到達時間差から、前記照射器から2つの側壁それぞれへの距離を算出することで、前記照射器の位置を特定する。
(もっと読む)
車両の床下地上高測定装置
【課題】作業性良好、かつ短時間で車両床下の地上高を測定できる測定装置を提供すること。
【解決手段】長尺の台座2の一端に台座2に平行に光を照射する光距離計3を設置するとともに、台座2の他端に光距離計3から所定の距離Lをおいて光距離計3からの照射光を垂直上方に反射する傾斜角θの反射鏡4を設置した構成で、反射鏡4を車両床下の測定対象個所5の垂直下方に位置せしめて台座2を測定基面G上に載置し、光距離計3から反射鏡4を介して測定対象個所5に至る距離の実測値から上記所定の距離(L)を減算するとともに、減算した値に反射鏡4の反射点Pの測定基面Gからの高さ距離(H3)を加算した距離を測定対象個所5の地上高(H)として読み取る。
(もっと読む)
デパレタイズ用のワーク位置認識装置および方法
【課題】ワーク上面の輪郭データに基づく誤検出を大幅に低減することができ、ワークの形状、模様及び画像の鮮明度の影響を低減して認識精度を高め、常に高い精度とワークの位置と姿勢を検出することができるデパレタイズ用のワーク位置認識装置および方法を提供する。
【解決手段】撮影装置12により、複数の同一ワーク1が同一平面上に並んだ画像3を撮影し、画像処理装置14により、画像3から輪郭データ5を取得し、輪郭データ5から各ワークの位置及び姿勢を検出し、画像中のワーク部分の画像をマスタ画像パターン6として登録し、マスタ画像パターンと各ワーク部分の画像とのパターンマッチングを行い、すべてのワーク部分に対しパターンマッチングが成功した場合に、各ワークの位置及び姿勢を出力する。
(もっと読む)
校正用治具、形状測定装置、及びオフセット算出方法
【課題】価格を低価格に抑えることが可能になると共に、高精度でオフセットを算出可能な校正用治具、形状測定装置、及び形状測定装置のオフセット算出方法を提供する。
【解決手段】校正用治具100は、基準球112と、基準球112を下方から支持し且つ基準球112が上方から照明された場合の光を正反射させる反射板111とを備える。また、校正用治具100は、反射板111上に形成され上面が平面を有する基準ブロック113を備える。基準球112の表面は、鏡面にて構成されている。
(もっと読む)
路側固定物検出装置
【課題】車両に搭載され、該車両側方の路側固定物を精度良く検出可能なガードレール検出装置を提供する。
【解決手段】距離画像センサにより、車両側方の判定対象物の距離画像を取得するとともに、車両の幅方向の走行位置に応じてテンプレート距離画像を生成し(ステップS5の処理を実行して)、該生成したテンプレート距離画像と該取得した距離画像とのマッチング度を算出し、該算出したマッチング度を基に判定対象物がガードレールか否かを判定する(ステップS11乃至ステップS13の処理を実行する)ようにした。
(もっと読む)
配筋検査装置および配筋検査方法
【課題】配筋検査を簡便に、しかも正確に行なえる構成とした、配筋検査装置および配筋検査方法の提供。
【解決手段】1は建設工事で施工される鉄筋で、多数配列されて1本の柱を構成している。2は鉄筋1の固定金具である。3は3次元レーザスキャナヘッドの固定冶具のグリップで任意の鉄筋1に取り付けられる。4は第1の回転軸でグリップ3、アーム5と結合されアーム5を矢視方向に回動自在に取り付ける。6はアーム5、3次元レーザスキャナヘッド7と連結される第2の回転軸で、3次元レーザスキャナヘッド7を矢視方向に回動自在に取り付ける。このように、3次元レーザスキャナヘッドは、グリップ3、第1の回転軸4、アーム5、第2の回転軸6からなる固定治具に取り付けられる構成としている。
(もっと読む)
3次元情報検出装置
【課題】1台のカメラで同時に撮像した被写体の2次元画像群を基にして被写体の3次元情報を検出することを図る。
【解決手段】空間的又は時間的に強度変調された強度変調光を発生する距離検出用光源部10と、被写体で強度変調光が反射された反射光を透過する複数のレンズ15が多眼的に配置されたレンズアレイ14と、複数のレンズ15の各々を透過した透過光を2次元撮像素子の結像面で各々結像させて、複数のレンズ15の各々に対応する被写体画像群を撮像し、該被写体画像群に基づいて被写体の3次元情報を検出する3次元カメラ16と、を備える。
(もっと読む)
3次元計測システム、計測端末、3次元形状の計測方法、およびトータルステーション
【課題】3次元形状を精度よく計測する。
【解決手段】3次元計測システムによる計測方法は、屋外で、計測端末を用いてGPS信号を受信して、内部時計の時刻をGPSの時刻に同期させるステップ(S810)と、トータルステーションが接続されているコンピュータに計測端末を接続して、コンピュータの内部時計の時刻を計測端末の時刻に同期させるステップ(S830)と、3次元計測の対象となるエリアに複数の基準点マーカを設定するステップ(S840)と、トータルステーションに計測端末を取り付けて、計測端末の内部のモーションセンサのヨー角(0度)と、トータルステーション220のヨー角(0度)とを一致させるステップ(S850)と、計測端末のレーザスキャナのレーザ計測方向の基準軸をモーションセンサのヨーイング方向の基準軸に合わせるステップ(S860)とを含む。
(もっと読む)
RGB及び奥行き計測ハイブリッドカメラセンサを使用する長方形テーブル検知
【課題】平面の位置をより確実にかつより正確に決定する。
【解決手段】テーブルのような平面を有する対象物が、奥行き画像及びカラー画像を処理することによって検知される。平面を有する対象物を含む可能性を有する領域を示すマスクが、奥行き情報を含む奥行き画像を処理することによって生成される。奥行き画像に対応するカラー画像がマスクを使用してトリミングされ、平面を有する対象物を含む可能性を有する、カラー画像の部分を検知する。トリミングされたカラー画像の、線のような幾何学的特徴が検知され、平面を有する対象物の位置及び向きを決定する。検知された幾何学的特徴のサブセットが、平面の輪郭として選択される。
(もっと読む)
三次元形状認識システム
【課題】移動する走査型測距装置を用いて走査範囲内に存在する物体までの距離分布を表すフレーム情報を取得しそれら物体の三次元形状を認識する三次元形状認識システムを提供すること。
【解決手段】移動する走査型測距装置2を用いて走査範囲内に存在する物体Pまでの距離分布を表すフレーム情報を取得し物体Pの三次元形状を認識する三次元形状認識システム100は、走査型測距装置2が出力する二つのフレーム情報に基づいて走査型測距装置2の移動内容を推定する移動内容推定手段10と、移動内容推定手段10が推定した移動内容に基づいてそれら二つのフレーム情報のそれぞれにおける距離分布の歪みを補正する歪み補正手段11と、を備える。
(もっと読む)
道路地物計測装置、地物識別装置、道路地物計測方法、道路地物計測プログラム、計測装置、計測方法、計測端末装置、計測サーバ装置、作図装置、作図方法、作図プログラムおよび作図データ
【課題】道路周辺の地物の位置を計測することを目的とする。
【解決手段】画像記憶部には道路周辺を撮影した画像が記憶されている。また、三次元点群モデル記憶部709には画像の撮影と同時に行われたレーザ計測により得られた3次元座標を示す点群が路面形状モデルとして記憶されている。モデル投影部172は点群を画像に投影し、画像表示部341は画像と点群とを重ね合わせて表示装置に表示する。画像点入力部342は計測対象の地物上の画素を計測画像点としてユーザに指定される。近傍抽出部171は計測画像点の近傍に位置し、計測対象の地物に重なっている点を点群から抽出する。地物位置算出部174は抽出された点が示す3次元座標を計測対象の地物の3次元座標として出力する。
(もっと読む)
環境地図取得装置
【課題】路面の凹凸や設置誤差の影響を受けることなく、正確に形状を計測することができるようにする。
【解決手段】測定精度が低い点群データの測定領域を特定する低精度測定領域特定部13と、レーザ光の走査角度範囲が低精度測定領域特定部13により特定された測定領域を包含するように可動台4のロー角を制御して、レーザスキャナ5により測定された追加の点群データを収集するスキャン手法変更部15とを設け、形状特定部17がスキャン処理部11により収集された点群データとスキャン手法変更部15により収集された追加の点群データを合成し、合成後の点群データから反射物の形状を特定する。
(もっと読む)
断面略円形の被判定材の長さ判定方法及び装置
【課題】正確に長さを判定できると共に、設備コストを抑えることのできる断面略円形の被判定材の長さ判定方法及び装置を提供する。
【解決手段】長さ判定装置100は、複数の鋼管Pをその長手方向一端が揃うように整列させる整列手段1と、複数の鋼管をその長手方向に略直交する方向に連続的に搬送する搬送手段2と、鋼管の搬送経路上に配置され、対向する搬送中の鋼管までの距離を測定する距離計3と、鋼管の搬送経路上において、距離計に対して鋼管の搬送方向に略直交する方向に沿って配置され且つ鋼管の長手方向他端の近傍に配置された検出センサ4であって、対向する位置での鋼管の有無を検出する少なくとも2つの検出センサ41,42と、距離計によって測定した距離測定値に基づいて鋼管の有無を判定し、鋼管が有ると判定したとき、検出センサの検出結果に基づいて鋼管の長さを判定する判定手段5と、を備える。
(もっと読む)
物体検出装置および物体検出方法
【課題】静止物体および移動物体についての座標算出を高精度に行うこと。
【解決手段】画像検知部が、車両に搭載されたカメラによって時系列に撮像された2つの画像を対比することによって静止物体の相対的な空間配置をあらわす相対3次元座標を取得し、レーダ検知部が、画像に対応する範囲について照射した照射波に係る反射波に基づいて静止物体および移動物体に係る距離および方位を取得し、物体座標認識部が、取得された方位に存在する前記画像内の静止物体について取得された距離を用いて相対3次元座標から絶対3次元座標を算出するように物体検出装置を構成する。
(もっと読む)
コンピュータを援用してセンサデータから物体の運動を計算する方法
本発明は物体に取り付けられたセンサのセンサデータからコンピュータを援用して物体の運動を計算する方法に関する。前記センサデータは様々な時点に検出された、前記物体の周囲にある測定点から成る測定点集合を含んでおり、第1の時点に検出された第1の測定点集合と第2の時点に検出された第2の測定点集合の間での前記物体の運動が求められる。本方法はまず、前記第1および第2の測定点集合から、例えば直線分、円などのような構造要素の形態で構造情報を抽出し、いずれの構造タイプにも割り当てられない測定点とともに記憶する。続いて、同じ構造タイプを有する構造要素間の対応付けを求め、構造要素を互いに写像する変換を実行する。最後に、次のステップにおいて、割り当て不能な測定点と構造要素との対応付けと対応付けられた測定点と構造要素の相互の変換が行われる。本発明の方法により複合スキャンが形成され、この複合スキャンに基づいて物体の固有運動を求めることができる。構造要素および測定点の対応付けは有利には、センサの測定雑音を考慮した統計的手法によって行われる。本方法は例えばロボット、車両、クレーンなどのような自律移動システムの固有運動を算出に使用することが特に適している。 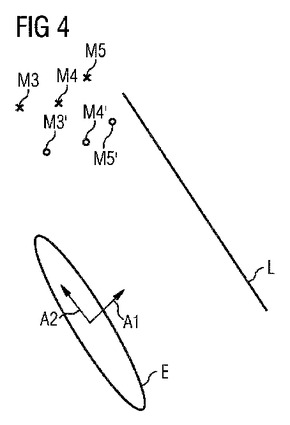 (もっと読む)
(もっと読む)
移動体および環境情報作成方法
【課題】移動しつつ環境情報を作成する移動体において、移動中に生じる振動等の影響を受けずに、周囲の環境情報を正確に作成することを可能にすること。
【解決手段】移動体本体と、周囲に存在する物体の前記移動体本体からみた相対位置を示す計測値を取得するセンサと、前記移動体本体に作用する加速度を検出する加速度検出部とを備えた移動体において、センサの取得した計測値に基づいて、移動領域に存在する物体の形状や位置を示す環境情報を作成する際に、センサが計測を行ったときの移動体本体の目標加速度と、前記加速度検出部により検出された加速度との大きさとの差を算出し、算出した差に基づいてセンサにより得られた計測値の信頼性を決定するとともに、その決定された信頼性に基づいて前記計測値を修正し、修正後の計測値に基づいて環境情報を作成するようにした。
(もっと読む)
距離画像再生装置および方法並びにプログラム
【課題】データ量を低減するよう変換された距離画像の画像ファイルを容易に逆変換できるようにする。
【解決手段】距離画像復号化部35が、符号化された距離画像の画像ファイルを復号化する。距離画像逆変換部34が、復号化された距離画像の画像ファイルに付与された変換に関する情報を取得し、この情報に基づいて、画像ファイルに含まれる距離値を逆変換する。逆変換された距離画像はモニタ20に表示される。
(もっと読む)
101 - 120 / 225
[ Back to top ]