
Fターム[2F065FF26]の内容
光学的手段による測長装置 (194,290) | 測定方法 (22,691) | 測定点を捜すもの (476) | モニター画像上で (129)
Fターム[2F065FF26]の下位に属するFターム
カーソル線によるもの (30)
Fターム[2F065FF26]に分類される特許
61 - 80 / 99
画像処理方法および装置
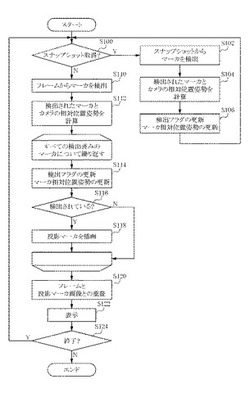
【課題】 指標を撮影した画像で撮像装置の位置あわせを行う時、操作者が、指標が正しく設置されていることを容易に確認できるようにする。
【解決手段】 撮影された画像から指標を検出する指標検出工程と、前記検出された指標の位置姿勢を計算する位置姿勢計算工程と、前記計算された指標の位置姿勢を保持する保持工程とを有し、前記取得された画像に対して、前記検出工程と、前記位置姿勢計算工程とを行うことにより、前記保持されている指標の位置姿勢を更新する画像処理方法であり、前記画像に投影画像を重畳すべき指標を判定する判定工程と、前記保持された指標の位置姿勢に基づき、前記画像に投影画像を重畳すべきであると判定された指標の投影画像を生成する生成工程と、前記生成された投影画像を前記画像に重畳する重畳工程とを有する。
(もっと読む)
表面検査システム及び表面検査システムの検査性能の診断方法

【課題】帯状被検査体に開口を設けたり、溶接線を利用したりして検査性能を診断する場合の不具合を避け、ラインを停止させることなく安定的に検査性能を診断できるようにする。
【解決手段】搬送される鋼板102の表面に光を照射する光源103と、鋼板102からの反射光を受光して撮像するカメラ107と、光源103と鋼板102との間に配置され、光源103の光の透過率を変化させることのできる液晶パネル105とを備える。表面検査システムの検査性能を診断するときに、鋼板102の搬送速度に応じて液晶パネル105による投影時間を変えたり、液晶パネル105による透過率を変化させて影の輝度を変えたりすれば、様々な大きさや形状、輝度の疵に対する検査性能を保証することができる。
(もっと読む)
マーキング装置およびマーキング方法
【課題】 所定の設置物を据え付ける据付面に効率よく据付位置をマーキングすること。
【解決手段】 据付面16に当接して据付面16に印を付けるスタンプ56と、スタンプ56の軸線と一致する光軸を有し、据付面16上にスタンプ56の現在位置を投影するポイントレーザ52と、スタンプ56をポイントレーザ52とともに移動させることによって、据付面16上に投影されるスタンプ56の現在位置を変更するXYアーム44と、据付面16を撮影するカメラ60と、カメラ60の撮影画像における据付位置とスタンプ56の現在位置との差分を求めるとともに、該差分に対応する距離だけXYアーム44によりスタンプ56をポイントレーザ52とともに移動させ、撮影画像における据付位置とスタンプ56の現在位置とが一致した状態でスタンプ56により据付面16上の据付位置Pに印を付ける制御を行う制御装置26を備えた。
(もっと読む)
位置計測装置、方法及びプログラム、並びに移動量検出装置、方法及びプログラム
【課題】計算コストをかけることなく、複数の画像から対象物の相対位置を正確に計測する。
【解決手段】撮像部11は、視点1、視点2、視点3で車両前方を撮像して、それぞれの位置において車両前方画像を生成する。縦エッジ線検出部12は、各画像から縦エッジ線を検出し、各縦エッジ線のX座標を表す水平位置uを検出する。対応縦エッジ線決定部13は、縦エッジ線検出部12で検出された視点1〜3における各車両前方画像間で対応する縦エッジ線を決定する。位置関係計算部16は、対応縦エッジ線決定部13で決定された対応する縦エッジ線についての水平位置ui、a、焦点距離fに基づいて、視点3に対する縦エッジ線piの位置を計算する。
(もっと読む)
磁気マッピング装置ならびにその位置決め方法
【課題】簡単、かつ、短時間で正規の取付位置に位置決めすることができる磁気マッピング装置並びにその位置決め方法を提供する。
【解決手段】 移動ステージ31を備えた磁気マッピング装置であって、レーザー光照射方向前方で磁気マッピング装置の設置の際の基準となる基準線L上の位置に取り付けられたヘッドアップディスプレイ2と、このヘッドアップディスプレイ2の前方で基準線Lの延長上に設置されたターゲットボード4とを含み、ヘッドアップディスプレイ2は基準線L上にシンボルマークを表示させ、ターゲットボードは基準線の延長上にターゲットマークを表示させ、レーザー照射器5から照射させたレーザー光をシンボルマークとターゲットマークとに合致するように移動ステージを設置する。
(もっと読む)
眼位置測定装置
【課題】 適切な眼鏡調整ができるように、被検者の使用環境に応じた状態で被検者の眼の位置を正確に測定できる眼位置測定装置を提供する。
【解決手段】 被検者眼を注視させるための注視目標を持ち該注視目標の呈示距離を光学的に変化させる注視目標呈示光学系と、被検者の両眼を含む前眼部を撮像するための撮像手段を持ち該撮像手段による撮影距離を光学的に変化させて前記注視目標と略同一位置から撮像する撮像光学系と、前記撮像手段により撮像された画像に基づいて被検者の眼位置を測定する測定手段とを備える。
(もっと読む)
立体計測装置
【課題】被検体までの距離情報、被検体の大きさを自動でモニター上に描画可能にする立体計測装置。
【解決手段】本発明による立体計測装置では、一組の撮像手段に用いられる固体撮像素子の水平走査位置を予め選択し、計測に用いる空間を2次元に限定することで被検体上の計測点を抽出し、被検体上の計測点に対応する一組の撮像手段に含まれる固体撮像素子上の対応点を自動的の検出し、計測用画像処理回路で距離情報を算出するとともに、距離情報に応じて目盛巾の変わる計測用目盛をモニター上に描画可能にした。
(もっと読む)
車間距離検出装置および車間距離検出方法
【課題】マルチパス等の影響によってレーダにより周辺車両が検出できなくなった場合でも、自車両から周辺車両までの車間距離を正確に測定することが可能な「車間距離検出装置および車間距離検出方法」を提供する。
【解決手段】レーダ1によって周辺車両が捉えられているときに、そのレーダ1で求めた正確な車間距離Lと、カメラ2により撮影された画像から求めた正確な車両見込み角θ1とから周辺車両の車幅Wを算出してメモリ5に保存しておく。レーダ1によって周辺車両が捉えられなくなったときには、メモリ5にあらかじめ保存しておいた周辺車両の正確な車幅Wと、その時点でカメラ2により撮影された画像から求めた正確な車両見込み角θ2とに基づいて、三角関数の定理を利用して周辺車両までの車間距離Xを算出する。
(もっと読む)
姿勢検出システム及び発光装置
【課題】簡略な構成により、対象物を特定することができるとともに、対象物の姿勢を検出することができる姿勢検出システムを提供する。
【解決手段】複数の赤外線タグ6−1〜6−4を備えるヘッドセット4は、ユーザの頭部に装着され、赤外線タグ6−1〜6−4は、赤外線タグ6−1〜6−4に対して一意的に割り付けられたID番号に応じて点滅するとともに、赤外線タグ6−1〜6−4の3次元位置関係を表す3次元位置情報に応じて点滅し、検出装置1は、ユーザを含む近赤外線画像を撮影し、撮影された近赤外線画像を用いて赤外線タグ6−1〜6−4を検出し、検出した赤外線タグ6−1〜6−4の点滅状態からID番号及び3次元位置情報を検出し、検出された各赤外線タグ6−1〜6−4のID番号及び3次元位置情報に基づいてユーザの頭部の姿勢を検出する。
(もっと読む)
被処理物の位置決め装置、被処理物の位置決め方法および被処理物の位置決め方法を実現するためのプログラム
【課題】 処理時間を短くすることのできる被処理物の位置決め装置、被処理物の位置決め方法および被処理物の位置決め方法を実現するためのプログラムを提供すること。
【解決手段】 帯状パターン12aに基づいてフレキシブル基板12の位置決めを行うパンチング装置10に、CCDカメラ14、ディスプレイ装置22および揮発性記憶部17を含む電気制御装置20を設けた。電気制御装置20は、帯状パターン12aの間隔に基づいて設定された案内線24をディスプレイ装置22に表示させるとともに、ディスプレイ装置22に形成したパターンマッチング画像26を揮発性記憶部17に記憶させる。さらに、電気制御装置20は、パターンマッチング画像26から目標とする帯状パターン12aの位置を画像処理によって求め、その目標とする帯状パターン12aの位置情報をパターンマッチング画像26に還元することでフレキシブル基板12の位置を求める。
(もっと読む)
パターンの高さを測定する方法及び装置
【課題】従来の欠点を解消した、対象物のパターンの高さを測定する方法及び同方法を実施するための装置を提供することを課題とする。
【解決手段】少なくとも一つの対象波長のための対象伝搬モードを有する入射光を、対象物(14)の表面(18)によって反射させる。その反射光は、少なくとも一つのパターン(5)によって分割成分(16,17)にされる、光の分割波面を有している。この方法は、次に、反射光(7)を集光して、その集光した光をフィルタリングし、対象波長のために、分割成分間の位相差に関するデータを抽出することを含んでいる。この方法によって、表面が構造化されて光を反射する対象物上のパターン、特に、シリコンウェーハ上のパターンの高さを測定することが可能になる。この測定方法は、例えば、深堀りプラズマエッチング中にパターンのエッチングをインサイチュ及びリアルタイムでモニターすることを可能にさせる。
 (もっと読む)
(もっと読む)
カメラ補正装置及びカメラ補正方法
【課題】実際のカメラ取付けパラメータを精度よく求め、マーカ表示や画像処理の精度を向上させることができるカメラ補正装置及びカメラ補正方法を提供する。
【解決手段】車輌に設置されたカメラ1、制御部2、デフォルトパラメータ保存メモリ3、描画部4、モニタ5、外部入力インタフェース6を備える。制御部2は、デフォルトパラメータ保存メモリ3に保存されたデフォルトのカメラパラメータに基づいて、調整パターンをイメージした調整マーカの描画データを生成するマーカ生成部21、外部入力インタフェース6からの入力に応じて、デフォルトパラメータに対する角度調整幅を判定し、調整された新たなデフォルトパラメータを算出するパラメータ演算部22を含む。
(もっと読む)
拡張現実感による情報提示システム、情報提示方法、情報提示装置およびコンピュータプログラム
【課題】 作業者の位置や姿勢の変化によって刻々と変化する視野画像から、保守対象機器の存在と、保守対象機器の位置と方向を画像処理の負荷を抑えて高速に特定する。
【解決手段】 プラント内の機器・配管・計測器など保守作業に関係する保守対象機器2に対して発光型RFIDタグ1を装着し、保守作業員が携行するR/W7からの発信によって、情報提示を要する保守対象機器2に関係した発光型RFIDタグ1を選択的に発光させ、保守対象機器2の位置と方向を簡単な画像処理により検出可能とする。このため、処理装置5は、カメラ3からの画像を取り込み、発光している発光型RFIDタグ1の位置を計算し、その画像から計算した発光型RFIDタグ1の座標を基点とし、作業に関連した情報をCGに変換してHMD4等の表示装置に表示する構成とした。
(もっと読む)
海上における対象物の捜索方法及びシステム並びに対象物の捜索方法を実行する記録媒体
【課題】捜索物及び捜索領域の状況に応じて捜索を確実にすることができる海上捜索システム及び装置並びにこの捜索を実行するプログラムを提供する。
【解決手段】海上に浮遊又は漂流又は走行している対象物を捜索する捜索方法であって、浮遊又は漂流又は走行している対象物の当該海域の海象条件を入力する入力装置103と、前記入力された海象条件及び対象物の大きさに応じた探知率変化を、予め記憶装置105に記憶されたデータベース106から読み出す読出し装置101と、前記読み出された探知率変化から対象物の認識確率を算出する算出装置102と、前記算出装置で算出された捜索モードを出力する出力装置104と、を備え、海象条件により捜索条件を策定する。
(もっと読む)
共焦点光学系を有した測定装置
【課題】半透明物質などに覆われた被検物であってもその内部の所望の被検部位の計測ができる共焦点光学系を有した測定装置を提供する。
【解決手段】測定装置は、共焦点光学系を備え、共焦点光学系の焦点面を被検物に対してその高さ方向に相対移動させながら異なる高さ位置ごとに、順次、前記被検物の光量データを取得し、記憶する装置であり、被検物の被検部位を指定すると共に、その指定した被検部位の高さ方向の光量データ分布グラフ上において、所望の測定範囲を任意に指定することで、その記憶した光量データに基づき被検部位の高さなどの測定が可能である。
(もっと読む)
走査型共焦点レーザ顕微鏡
【課題】観察試料の複数の観察面間におけるマークの位置ずれやギャップを計測する場合に従来の顕微鏡より装置を複雑化、大型化せず、正確に計測できる走査型共焦点レーザ顕微鏡を提供する。
【解決手段】レーザ光源と、前記レーザ光源から出射されたレーザ光を観察試料に集光する対物レンズと、前記観察試料からの反射光を受光して電気信号として出力する受光素子と、前記受光素子で検出したレーザ光の輝度情報を抽出し、観察試料の観察画像を構築する演算部と、前記演算部で構築された観察画像を記憶する画像記憶部と、前記観察画像を表示する表示部を有する走査型共焦点レーザ顕微鏡であって、前記画像記憶部に記憶されている複数の観察画像から、任意に選択した第一の観察画像と、前記第一の観察画像と異なる画像を少なくとも一つ選択し、前記選択した画像の一部を切り取り、前記第一の観察画像に重ね合わせて合成画像を作成する合成画像作成部、を備えた。
(もっと読む)
画像計測装置及び方法
【課題】 特徴点の選択による計測箇所の指定操作を効率的に行えるようにする。
【解決手段】 固体撮像素子21は、異なる視点から計測対象物30を撮像して視点毎の画像を取得する。画像処理装置23は、当該画像における計測対象物30の像から特徴点を抽出し、当該特徴点を抽出した画像とは異なる当該画像における計測対象物30の像から当該特徴点に対応する点の探索を行い、当該画像上における当該特徴点のうち当該特徴点に対応する点が当該探索によって得られたものに対して所定の印を表示させ、当該印が表示されている特徴点のうち1以上の特徴点が選択されたときの選択結果を取得し、当該選択結果に係る特徴点を計測対象として、当該視点毎の画像の撮像時における視差に基づいた三角測量による三次元計測を行う。
(もっと読む)
イメージディスプレイ及びイメージセンサを含む定位システム
【課題】イメージディスプレイ及びイメージセンサの相対角度を任意に回転でき、該イメージセンサが検知する定位ユニット及び補助ユニット全てのダイナミックスペースの範囲で、指向性の定位プロセスが正確に行われる映写定位システムを提供する。
【解決手段】定位システムであって、異なる識別コードが指定される光を発生できる少なくとも三つの定位ユニット、及びこれらの定位ユニットの二つを結ぶ線分に、或いはその近傍にあって光を発生できる補助ユニットを含む。イメージセンサはこれらの定位ユニット及び該補助ユニットから発光される光を受け取って、この受け取った光によってこれらの定位ユニット及び該補助ユニットの空間座標を求め、これらの定位ユニット及び補助ユニットとの間の空間関係に基づいてこれらの定位ユニットの識別コードを求め、識別コードの順序に対応する定位ユニットの座標で指向性の定位プロセスが正確に行われる。
(もっと読む)
移動体検出測定装置、移動体検出測定方法および記録媒体
【課題】移動体の高さを測定する際、複数の着目領域を格子状に定義し、その検出結果を組合せて測定する場合、検出制御が複雑になる。また、高さを測定する検出判断において、より正確な測定を行う場合、複数の着目領域を格子状に多数定義する必要があり、組合せ判定に時間がかかる。
【解決手段】基本線および分割線からなる同一直線上で定義される線状の監視領域の画像構造の変化によって映像中の移動体を検出する手段を複数個設け、最大画像構造変化量値のときの検出結果から得られるコードにより、移動体の高さをより簡単にかつ精密に検出測定する。
(もっと読む)
透明基板の寸法変化を測定するための方法及び装置
透明基板の寸法変化を測定する方法は、基準プレート上に基準マーカーのアレイを形成する工程、透明基板上に基板マーカーのアレイを形成する工程、基準マーカーと基板マーカーが重なるように基準プレートと透明基板を積み重ねる工程、透明基板の処理の前後に基準マーカーの座標に対する基板マーカーの座標を測定する工程及び、透明基板の処理の前後の測定された基板マーカーの相対座標の間の差から透明基板の寸法変化を決定する工程を含む。  (もっと読む)
(もっと読む)
61 - 80 / 99
[ Back to top ]