
Fターム[2F065GG14]の内容
光学的手段による測長装置 (194,290) | 光源 (11,799) | 光源形態 (1,634) | 点の配列 (783) | 列状 (211)
Fターム[2F065GG14]に分類される特許
141 - 160 / 211
光学検査
本発明は、半導体ウェハ、光学薄膜、ディスプレイスクリーンなどの基体における欠陥の物理的特性を決定して、特定して位置を定める方法に関する。方法は、基体を撮像するためにPCスキャナの使用を伴う。特に、透過モード撮像において用いられるPCスキャナは、基体の体積に関する情報を決定することを可能にする。方法は、干渉法技術の使用により、層厚、曲率および光学定数などの特性の決定を可能にし、偏光撮像の使用により、複屈折率および歪みの決定を可能にする。方法はまた、例えば、光ルミネセンスおよびエレクトロルミネセンスなどの基体におけるルミネセンスに刺激を与え、ルミネセンスマッピングのために刺激を与えた基体を走査することに関する。  (もっと読む)
(もっと読む)
物品の二つの端部を互いに識別する方法及び装置

本方法は、物品の一端部(P)の外形に近似する曲線(PF)を発生するステップと、前記曲線が前記第1端部又は第2端部の外形に近似しているかどうか決めるため前記曲線を処理するステップとを含む。 (もっと読む)
画像情報生成方法
【解決手段】走査対象物が1つ以上の表面、および/または、1つ以上の本体、および/または、1つの空間を有し、走査対象物自体、または、走査装置の全体、または、走査装置の一部が走査処理時に動かされ、走査対象物が走査層の領域で走査装置によって走査され、走査対象物を走査する走査ビームのビーム経路が、走査層へ任意の角度で向けられる、および/または、走査層が、走査対象物に対して任意の位置で選択される画像情報生成方法。 (もっと読む)
パッケージのサイズを測定するための装置
パッケージ測定装置は、3つの測定装置を備え、各測定装置は、パッケージの全ての次元の1に対応する。各測定装置は、複数の信号レセプターモジュールを備える。各モジュールは、一列の信号レセプターおよび信号エネルギー源を備える。第1のキャリブレーション工程において、各レセプターの出力は、基準の最大および最小に、標準化される。第2のキャリブレーション工程において、レセプター出力のキャリブレーションセットは、作成され記録される。測定の間、レセプター出力の測定セットは、得られ、レセプター出力のキャリブレーションセットと適合させられ、物体の次元を決定する。  (もっと読む)
(もっと読む)
土砂運搬船の積載土量計測方法

【課題】土砂運搬船の積載土量計測方法に関し、簡易な設備で工期短縮して積載物の検収ができるようにする。
【解決手段】土砂運搬船1の船倉に積載された積載物の表面を計測処理上での複数の箇所に分割し、その分割した区画毎に前記積載物の積載表面形状を小型携帯用計測器によって前記土砂運搬船の船倉枠を基準として積載物分割三次元データを計測し、その積載物分割三次元データをコンピュータ4に取り込ませ、前記複数箇所の積載物分割三次元データを、前記船倉枠の1点を座標原点に設定して統一した座標軸上の三次元データに各々変換し、且つ、それらを前記分割した区画に対応して連続するように結合し、その結果得られた前記積載物の表面形状の座標データと船倉枠の形状の座標データとを三次元的に重ね合わせて、前記積載物の表面形状と前記船倉枠の下側形状とに囲まれた部分の体積を容積算出プログラムにより求める。
(もっと読む)
画像処理によるトロリ線摩耗測定装置
【課題】トロリ線からの反射光にムラができず、均一な照明条件を作ることを目的とする。
【解決手段】ラインセンサ11を用いてラインセンサ画像を作成するラインセンサ画像作成手段50と、ラインセンサ画像に対して二値化処理を行うことにより二値化ラインセンサ画像とする二値化処理手段53と、前記二値化ラインセンサ画像のノイズを除去するノイズ除去処理手段54と、ノイズ除去後の前記二値化ラインセンサ画像からトロリ線摩耗部のエッジを検出しエッジデータとするエッジ検出処理手段55と、前記エッジデータとトロリ線高さデータに基づいてトロリ線摩耗部幅の計算を行うトロリ線摩耗部幅計算処理手段56とを有する画像処理によるトロリ線摩耗測定装置において、前記ラインセンサ1は、検査車両4の屋根上にトロリ線3を見上げるよう鉛直上向きに設置され、且つ、前記トロリ線3を照明する照明手段は前記検査車両4上で前記検査車両の進行方向に対して垂直をなす方向に複数の点光源2を直線状に設置してなることを特徴とする。
(もっと読む)
塗布状態評価方法及び塗布状態評価装置
【課題】 被塗装物の帯状の塗布領域に塗布材を連続的に塗布して帯状に形成された塗布膜の塗布状態を評価する場合、3次元曲面上に塗布膜が形成されている場合に、その曲面方向の変化を加味して、また、塗布材を塗布する塗布条件が変化する場合に、その塗布条件の変化を加味して、精度が良い適正な塗布状態の評価を、塗布領域をその長さ方向に複数分割した分割区間ごとに行う。
【解決手段】 塗布領域9をその長さ方向に複数分割した複数の分割区間を設定し、塗布領域9をその幅方向に複数分割して塗布領域9の長さ方向に連続して延びる複数の分割レーンを設定し、塗布領域9にスポット光20aを照射しその反射光を受光する検出ヘッド16をプライマ塗布膜5に沿って走査させ、複数の分割区間の各々について、検出ヘッド16で受光した光の受光データを複数の分割レーン別に処理し、これら受光データに基づいて塗布状態を評価する。
(もっと読む)
対象物の位置を光学的に決定する方法および装置
実質的に平らな表面の特定領域(2)上の対象物(1)の位置を光学的に決定する方法および装置。特定領域(2)を対象とする少なくとも2つの指向性点状光レシーバ(R1、R2)に対応する少なくとも1つの指向性点状光エミッタ(E1)を特定領域(2)の近傍に配設する。各光エミッタおよび光レシーバは、それぞれ最大の発光および最大の角度感受性を観測するために特定領域に対して略平行な軸を有している。光レシーバ(R1、R2)の軸(AR1、AR2)は、異なる点(P1、P2)で光エミッタ(E1)の軸(AE1)と交差する。光エミッタ(E1)を作動させて、2つの光レシーバ(R1、R2)の各々に向かって対象物(1)により反射拡散された光信号(S1、S2)を比較することにより、光エミッタ(E1)の軸(AE1)上の対象物(1)の位置を決定する。  (もっと読む)
(もっと読む)
板ガラスの検査
板ガラスの欠陥検査方法を開示する。この方法は、板ガラスを第1波長を有する光で照射して明視野像を作成し、該板ガラスを第2波長を有する光で照射して暗視野像を作成することを備える。明視野像および暗視野像を、単一の画像取得装置を用いて取得する。明視野および暗視野像を共通のレンズによって画像取得装置上に結像する。加えて、影絵像も同時に記録することができる。この検査方法は、自動車用板ガラスのような板ガラス用の優れた欠陥検出システムを提供する。 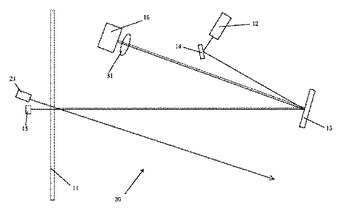 (もっと読む)
(もっと読む)
光学式位置センサー部品、光学式位置センサー及びその製造方法
【課題】光伝導度が高い導波路を用いた光学式位置センサー部品、光学式位置センサー及びその製造方法を提供することを目的とする。
【解決手段】光学式位置センサー部品は、入力用導光部13と受光用導光部23とを備える。入力用導光部13は、近赤外の発光源11において発光した光を入射し、入射した光を複数の末端からコリメート用のレンズ14へ出射する高分子導波路からなる。受光用導光部23は、入力用導光部13から出射された光を末端から入射し、入射した光を近赤外の受光素子21へ出射する複数の高分子導波路からなる。また、入力用導光部13及び受光用導光部23において、高分子導波路を構成するコア部分に感光性樹脂組成物の硬化物を用いている。
(もっと読む)
透明導電膜評価装置及び透明導電膜の評価方法
【課題】透明導電膜の電気特性を短時間で的確にオンラインで検査することが可能な透明導電膜評価装置及び透明導電膜の評価方法を提供する。
【解決手段】計測する特性に対応した波長を有する光を、照射光として、基板11上に形成された透明導電膜へ照射する照射部3と、照射光が透明導電膜で反射された反射光を受光する検出部2と、照射光と反射光とから算出される反射率に基づいて、透明導電膜の特性を評価する制御部7とを具備する透明導電膜の評価装置を用いる。波長は、反射率と特性との相関が0.7以上である。透明導電膜のシート抵抗の計測には、波長として2.0μm以上3.0μm以下を用いてもよい。透明導電膜の抵抗率の計測には、波長として1.5μm以上1.8μm以下を用いてもよい。
(もっと読む)
光シャッター
【課題】頑丈で多様に使用できるような、光シャッターを構成する。
【解決手段】光シャッターを個別のモジュール(10)で構成する。各モジュール(10)は、発光ユニット及び/又は受光ユニットを閉鎖されたケーシング(12)内にあり、かつ独立して機能する発光ユニット及び/又は受光ユニットである。モジュール(10)は、エネルギー及び/又は信号を伝送するために、連なって電気的に切り離して互いに結合できる。レンズ14の走査間隔が変わることなく、モジュール10を隣り合わせで繋ぐことができる。
(もっと読む)
スラブ積み形状測定装置および方法
【課題】耐熱性よく簡便・迅速にスラブの積み形状を測定するスラブ積み形状測定装置および方法を提供することを目的とする。
【解決手段】山積みされたスラブを搬送する移動機の横に、搬送方向と直角にかつ山積み方向に複数配置した通過センサと、該通過センサからの信号に基づいて、前記スラブの山積み状態を求めるデータ収集演算装置とを備える。
(もっと読む)
欠陥検査方法、欠陥検査装置
【課題】最適な照明配置条件を見出す時間を短縮でき、検査装置を複雑化および大型化することを回避しながら、数十nm〜数百nm程度の分解能で膜厚差を検出できる欠陥検査方法および欠陥検査装置を提供する。
【解決手段】カラーフィルタ等のカラーフィルタ基板101に対し照明光102cを照明する線状光源102aを有する照明装置102を設ける。照明光102cが照明されたカラーフィルタ基板101からの反射光102dを撮像する撮像装置103を設ける。撮像結果から欠陥の有無を判定する画像処理装置106を設ける。線状光源102aのカラーフィルタ基板101に対する位置関係である照明配置条件を調整するための制御装置105を設ける。線状光源102aを複数の照明位置に変化させる駆動レール部102bを、制御装置105により制御されるように設ける。
(もっと読む)
弾丸位置計測装置
【課題】 計測領域の広さ及び計測できる弾丸の種類が制限され難くい弾丸位置計測装置を提供する。
【解決手段】 射撃の目標となる標的11への射撃を行う側に弾丸8の弾道tと交わる方向の平たい幕状の光を照射し、予め設定した間隔で離して設置され、互いに異なる波長の光を発光する複数の光発生器3a−3gと、複数の光発生器3a−3gと対向する位置に、複数の光発生器3a−3gが並ぶ方向で、光発生器3a−3gで形成する幕状の光に対応して延在する受光器5と、受光器5からの出力信号に基づいて、少なくとも2つの光発生器3a−3gによって形成される幕状の光が重なり合う領域に対応する計測領域13を通過する弾丸8の位置を演算する弾丸通過位置演算部9とを備えた構成とする。
(もっと読む)
形状測定装置,形状測定方法
【課題】形状測定対象の試料の大きさにかかわらず,高い分解能での形状測定を行うことが可能な形状測定装置,及び形状測定方法を提供すること
【解決手段】所定の基準平面Cに沿って試料11に対向配置された第1の集光レンズ13,前記基準平面からの距離が各々異なる複数の出射位置から複数の測定光を前記第1の集光レンズ13に向けて出射するLEDアレイ12,前記試料11により反射された反射光を集光する第2の集光レンズ13,前記第2の集光レンズ13に集光される前記反射光の強度を検出する受光素子アレイ9の相互の位置関係を保持して光学系βとして形成し,前記光学系βと前記試料11との前記基準平面Cに略平行な方向(走査方向)に相対位置を変位させる。
(もっと読む)
スラブの山姿検出方法
【課題】段積みされてコンベア等で搬送されているスラブの山姿を精度良く検出することができ、クレーン作業の効率向上を可能とするスラブの山姿検出方法を提供する。
【解決手段】段積みされたスラブ1を搬送するコンベア2を横切るような水平光線15を投光する投光器13とその水平光線15を受光する受光器14を、高さ方向にΔhの間隔で複数個配置し、段積みされたスラブ1の搬送にともなう水平光線15の受光状態の時間的変化に基づいて、当該スラブ1の山姿を検出する。
(もっと読む)
ピンベースマスクおよび低角度照明を備えたカメラベースのピングリッドアレイ(PGA)検査システム
集積回路デバイス(10)上のピングリッドアレイ(15)を検査するための検査システム(1)は、ピングリッドアレイ(15)を有するデバイスを受け付けるように構成されたピンベースマスク(30)を備えている。暗視野・低角度照明システム(40)は、ピングリッドアレイ(15)に発光する。ピンベースマスク(30)および暗視野・低角度照明システム(40)は、ピングリッドアレイ(15)に関する鮮明で明確な画像を提供する。カメラ(50)はピングリッドアレイ(15)の画像を取得する。カメラ(50)に接続されたプロセッサ(90)は、カメラ(50)により取得された画像を分析する。取得された画像に基づいて、プロセッサ(90)はピングリッドアレイ(15)上のピンが湾曲(13、14)または欠落しているか否か、または、余剰なピンが存在しているか否かを決定する。  (もっと読む)
(もっと読む)
高さ測定装置および方法
【課題】 高さ測定の技術を提供する。
【解決手段】 本発明の高さ測定装置は、被検物の所定の高さ方向について高さを測定する高さ測定装置であって、照射部、センサ部、および高さ検出部を備える。照射部は、波長が異なる複数の光束を高さ方向に隙間無く配列した照射光束を、高さ方向に対して傾いた角度で被検物の測定箇所に照射する。センサ部は、照射光束による被検物の測定箇所からの反射光を受光し、反射光の波長を検出する。高さ検出部は、センサ部で検出された反射光の波長に基づいて、測定箇所における被検物の高さを求める。
(もっと読む)
路面形状計測装置
【課題】車両の運動の影響を排除して、小さな凹凸や、起伏、うねり等があるような一般的に考えられる路面に対して、絶対的路面形状を正確に計測できるようにすることを目的とする。
【解決手段】車両12が計測対象路面を走行することにより、検出部支持体14がボデーと共に傾いても、水平制御装置が駆動機構を制御し、検出部支持体14を常に水平に維持する。このため、路面形状計測時に車両12の運動の影響を排除することができ、小さな凹凸や、起伏、うねり等があるような一般的に考えられる路面に対して、絶対的路面形状を正確に計測することが可能である。
(もっと読む)
141 - 160 / 211
[ Back to top ]