
Fターム[2F065JJ09]の内容
光学的手段による測長装置 (194,290) | 受光部 (23,546) | 配置;方向 (2,894) | 被測定物に対し垂直 (1,561)
Fターム[2F065JJ09]に分類される特許
201 - 220 / 1,561
半導体ウェハの表面検査システム及び表面検査方法
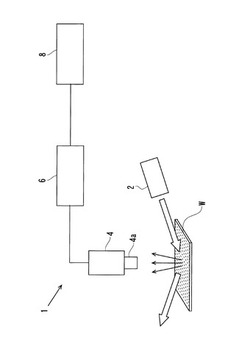
【課題】半導体ウェハ表面に存在するソーマークなどの線状の凹凸について、短時間かつ容易に検査が可能であり、検査に対する振動の影響を低減できる技術を提供する。
【解決手段】半導体ウェハWの表面の全域に光源装置2によって斜め方向から光を照射し、CCDカメラ4で半導体ウェハW全体を撮影する。これにより、半導体ウェハWの各ポイントからの前記照射光の反射光または散乱光の強度を検出する。取得された光の2次元的な強度分布に基づいて、半導体ウェハWの表面に生成されたソーマークなどの凹凸を検出し、またはその大きさを測定する。
(もっと読む)
外観検査装置

【課題】
光学素子の欠陥を精度よく確認することができる外観検査装置を提供すること
【解決手段】
本発明の外観検査装置は、基板7の欠陥を検出する外観検査装置であって、前記基板7の平面に対してそれぞれ斜めに光を照射するとともに前記基板7を挟んで配置された複数の低倍率カメラ用光源3と、これらの低倍率カメラ用光源3の光軸と交差する方向に光軸を有するとともに、前記低倍率カメラ用光源3から照射されて前記基板7から反射または透過する光を撮像する低倍率カメラ4と、前記基板7の平面に対して垂直に光を照射する高倍率カメラ用光源5と、この高倍率カメラ用光源5の光軸と同一の光軸を有するとともに前記高倍率カメラ用光源5から照射されて前記基板7で反射された光を撮像する高倍率カメラ6と、を備えることを特徴とする。
(もっと読む)
管端部のねじ要素測定方法
【課題】ねじ加工が施された管端部のねじ要素をオンライン(ねじ加工ライン)で自動的に精度良く測定する方法を提供する。
【解決手段】本発明は、順次搬送される管Pの端部にねじ加工が施されるねじ加工ライン100上で、ねじ加工後の管端部のねじ要素を自動的に測定する方法であって、ねじ加工後の管端部をねじ洗浄装置30で洗浄する洗浄工程と、前記洗浄された管端部をねじ乾燥装置40で乾燥させる乾燥工程と、前記乾燥後の管端部のねじ要素を自動ねじ要素測定装置50で測定する測定工程とを含み、少なくとも前記測定工程においては、管端部が清浄雰囲気下におかれることを特徴とする。
(もっと読む)
光学式表面粗さ測定装置
【課題】 微小な凹凸に加えて周期と変動量の大きな凹凸が存在する測定対象物の表面粗さも検出できるようにする。
【解決手段】 測定対象物OBの表面上を接触しながら移動するスライダ44に対物レンズ305を配置するとともに、スライダ44をプローブ40によって光学ヘッド本体30に弾性的に支持する。レーザ光源301からのレーザ光を対物レンズ305により集光させて測定対象物OBの表面に照射し、測定対象物OBの表面からの反射光をフォトディテクタ308で受光して、フォーカスエラー信号を生成する。フォーカスエラー信号を用いてレーザ光の焦点位置から測定対象物OBの表面位置までの距離に応じて変化する距離を計算して、前記計算した距離に、スライダ44の光学ヘッド本体30に対する相対位置の変動量を加味して測定対象物OBの表面の基準面に対する凹凸の大きさを計算する。
(もっと読む)
画像処理装置
【課題】従来の2次元画像処理装置と同様に、利用可能な処理項目を提示して3次元計測の処理のシーケンスを作成させるユーザインタフェースを持つ画像処理装置を提供する。
【解決手段】2次元画像処理の複数の項目、および3次元計測処理の少なくとも1つの項目が登録された画像処理装置において、ユーザによる処理項目の選択に応じて2つの画像A0,A1を用いた処理のシーケンスを設定して実行する。2次元画像処理の項目には、画像A0に対し、あらかじめ登録されたモデル画像との一致の程度が高い領域71の代表位置を特定する処理項目が含まれる。この処理項目を含むシーケンスに組み込まれる3次元計測用の項目は、画像A1に対し、上記のモデル画像との一致の程度が高い領域81の代表位置を特定する処理と、各領域71,81の代表位置を用いて3次元計測用の演算処理を実行する処理とを実行するように設計される。
(もっと読む)
光学式エンコーダおよび干渉計測装置
【課題】高精度な光学式エンコーダを提供する。
【解決手段】本発明のエンコーダは、移動可能な格子スケールと、前記格子スケールに照射した光束の反射光または透過光を光電変換して、互いに位相差が異なるN相(Nは6以上の整数)の周期信号を生成する複数の受光素子と、前記受光素子で生成された各相の前記周期信号に対してM組(Mは2以上の整数)の係数群を乗算し、該係数群を乗算して得られた値の総和からM相の正弦波状周期信号を生成する増幅器とを有する。
(もっと読む)
検査装置および検査方法
【課題】光学的な測定を行うための照射部および受光部がそれぞれ最小個数でありながらも、被検査基板の測定対象物の光学的な測定を精度良く行うことが可能な検査装置および検査方法を提供する。
【解決手段】レーザー計測器33はレーザー光を照射する照射部33aと測定対象物111で反射された反射光を受光する受光部33bを有し、シャフト333の下端に取り付けられている。シャフト333にはベルト335を介してモータ331の回転駆動力が伝達されるように構成されており、レーザー計測器33はモータ331の回転により向きを変更可能に構成されている。これによって、測定対象物111から見たレーザー光の入射経路L1と反射光の反射経路L2との入受光関係が調整可能になっている。
(もっと読む)
部品位置の計測装置及び計測方法
【課題】蒸気タービンの構成部品位置を計測する際に、計測用の冶具の製作や取り付け等の手間が不要であり、構成部品位置を直接計測することで測定精度並びに信頼性の高い計測が可能な部品位置の計測装置及び計測方法を提供する。
【解決手段】レーザ光3を照射するレーザ発振器1と、レーザ発振器1からのレーザ光3の照射方向に沿って走行することが可能な装置本体5と、装置本体5に設けられ、レーザ光3を所望の角度へ屈折して照射する光学部品と、装置本体5に設けられ、光学部品により屈折され照射されたレーザ光3が構成部品により反射されたレーザ反射光の受光量を検出する受光素子8とを備える。
(もっと読む)
接触角計
【課題】液滴の平面視輪郭形状をより簡便な方法で接触角と共に測定可能な接触角計を提供する。
【解決手段】本発明に係る接触角計1は、試料2が載置されるステージ20と、試料2上の液滴4を側方から撮像して液滴4の接触角を測定する第1撮像装置30と、試料2上の液滴4を上方から撮像して液滴4の平面視輪郭形状を測定する第2撮像装置40と、を備えている。
(もっと読む)
円筒体の輪郭形状を測定するための方法及び装置
ダイアモンド状カーボン薄膜の膜厚と屈折率の計測
【課題】 平面、円筒、自由形状を含む各種形状の基板の外面および内面上に施したDLC薄膜の膜厚と屈折率を近赤外光を用いて精度良く測定することを目的とする。
【解決手段】 グラファイト成分を含むダイアモンド状カーボン薄膜が半透明な波長域の近赤外光を光源として利用することを特徴として垂直反射干渉スペクトル計測によって膜厚と屈折率の積を求める。
また、干渉測定する対象試料の同一点の屈折率を同一光源を用いて、傾斜入反射測定計で反射物質の屈折率のみで決まるブリュースター角を測定することで、屈折率を決定する。結果として、正確な膜厚が求まる。
(もっと読む)
キャリブレーション装置及びキャリブレーション方法及び位置検出用治具及び部品検査装置
【課題】より簡易な構成でありながら、部品を把持する把持部とその位置を補償するためのカメラとの相対位置を補償、校正することのできるキャリブレーション装置及びキャリブレーション方法、及びこうしたキャリブレーションに用いられる位置検出用治具、及び部品検査装置を提供する。
【解決手段】キャリブレーション装置は、部品検査装置に設けられ、ICチップを搬送するロボットハンドユニットが備えるICチップを撮像するカメラの視野中心と、認識されたICチップを吸着するノズルの軸中心との間の相対位置関係を検出する。部品検査装置には、この相対位置関係を検出するためにノズルの平行移動範囲内に設けられたフォトセンサー41と、該フォトセンサー41と所定の位置関係でかつカメラの撮像範囲内に設けられた認識マーク45とが設けられている。
(もっと読む)
測定システム及びその校正方法
【課題】 測定物の位置に関わらず、正しい演算結果が得られるように校正する作業を簡略化することができる測定システムを提供する。
【解決手段】 センサ出力から測定値y2を求める子機コントローラ30と、センサ出力から測定値y1を求める親機コントローラ20により構成される。親機コントローラ20は、測定値y1及びy2から測定物の厚さを示す演算値zを求め、第1及び第2校正用測定物の既知の厚さとして、第1及び第2目標値を記憶し、第1校正用測定物から得られた測定値y2を記憶する。そして、第1校正用測定物を測定軸方向に移動させて得られた測定値y2と測定値記憶部24a内の測定値y2との間の変化量に基づいて、測定値y1の校正を実行する。また、第1校正用測定物から算出された第1演算値を記憶し、第1及び第2目標値と第1演算値と第2校正用測定物から算出された第2演算値とに基づいて、演算値zの校正を実行する。
(もっと読む)
曲率測定装置
【課題】小型で広い範囲の曲率を精度よく測定できる曲率測定装置を提供する。
【解決手段】被検査体3を載置台5に載置し、レーザ発光器10により発光されたビーム光をポリゴンミラー22で等角速度走査し、fθレンズ50を介して、被検査体3表面を走査する。被検査体3表面から反射されたレーザ光をシリンドリカルレンズ60で集光し、載置台5の一点から等距離で、互いの距離が一定である位置に配置され、被検査体3から反射されるビーム光を検出する2つのビーム光検出センサ(第1及び第2レーザ光検出センサ30,32)でレーザ光を検出した時間差及び2つのビーム光検出センサ30,32の間の距離d2、被検査体3表面からの距離Lに基づいて、被検査体3の表面の曲率を算出する。
(もっと読む)
外観検査装置
【課題】太陽電ウエハの3次元形状を正確かつ高速に算出する。
【解決手段】第1及び第2形状算出部24,34は、撮像部20により所定のフレームレートで連続的に撮像された複数枚の光切断線画像の画像データを基に、ウエハ50の表面の3次元形状データを算出する。ここで、第1形状算出部24は、カメラ21〜23が現フレームの光切断線画像を撮像する期間に、1つ前のフレームに探索処理を行うと同時に、2つ前のフレームの光切断線画像に重心算出処理を行う。
(もっと読む)
渦電流測定あるいは光学測定を利用して、メタライゼーション処理を実状態で監視する方法
【課題】サンプルに形成された薄膜の除去工程中に該薄膜に関する情報を、渦電流プローブを使用して実状態で取得する方法を開示する。
【解決手段】渦電流プローブに検出コイルを設ける。渦電流プローブの検出コイルに交流電圧を印加する。渦電流プルーブの検出コイルがサンプルの薄膜に近接したときには、該検出コイルで第1の信号を測定する。該検出コイルが、既知の組成を有しおよび/または該コイルから離れて設けられた基準部材に近接する位置にあるときには、該検出コイルで第2の信号を測定する。第1の信号に含まれる利得及び/又は位相の歪みを第2の信号に基づいて校正する。校正した第1の信号に基づいて薄膜の特性値を決定する。上述の方法を実行する装置を更に開示する。加えて、研磨剤でサンプルを研磨し、このサンプルを監視する化学機械研磨(CMP)システムを開示する。このCMPシステムは、研磨テーブルと、研磨テーブル上でサンプルを保持する構成であるサンプルキャリヤと、渦電流プローブとを含む。
(もっと読む)
計測方法、露光方法及び露光装置、並びにデバイス製造方法
【課題】位置計測系の周期誤差が発生しても、精度良く周期パターンの位置を検出する。
【解決手段】可動ステージの位置を位置計測系を用いて計測し、その計測情報を用いて可動ステージを駆動するとともに、可動ステージ外の周期パターンから成る計測用マークを可動ステージに一部が配置された検出器を用いて検出する。ここで、位置計測系の計測周期(図10(B)及び10(C)に示される例では0.25μm)の自然数倍と異なるピッチ(図10(C)の例では2.03125μm(なお、図10(B)の例では2μm))の周期パターンを計測用マークとして用いることにより、計測周期に等しい位置計測系の周期誤差が発生しても、検出精度を損なうことなく、計測用マークの位置情報を計測することが可能となる。
(もっと読む)
検査装置および検査方法
【課題】画像認識に適した検査用の画像に用いる撮像画像を決定するための作業を簡素化するとともに決定基準を標準化することが可能な検査装置および検査方法を提供する。
【解決手段】この外観検査装置100(検査装置)は、複数の照射角度で照明光を照射可能な照明部41と、検査対象部位Pおよび非検査対象部位Qを複数の照射角度の照明光を用いてそれぞれ撮像する撮像部42と、複数の照射角度の照明光を用いてそれぞれ撮像された複数の撮像画像中の検査対象部位Pにおける光の強度と、複数の撮像画像中の非検査対象部位Qにおける光の強度とに基づいて、検査用画像に用いる撮像画像を決定する演算処理部51とを備える。
(もっと読む)
顔向き検知装置
【課題】サングラスを着用したひとの顔の中心位置の検出精度を向上させる。
【解決手段】顔向き検知装置10は、ひとの顔を撮像する乗員カメラ12から出力された顔画像から、撮像用光源14から照射された光の反射点を抽出する反射点抽出部21と、反射点の面積が最大となる1対の反射点を選択する反射点選択部22と、1対の反射点間の中心座標を算出する中心座標算出部23と、サングラス着用判定部27から出力された判定結果においてひとがサングラスを着用していると判定された場合に、中心座標算出部23から出力された中心座標に基づき、ひとの顔中心位置を検出する位置検出部28と、ひとの顔中心位置に基づき、ひとの顔向き方向を検知する顔向き検知部29とを備える。
(もっと読む)
形状検出装置
【課題】ウェハの外周端部を全周にわたって短時間のうちに形状検出できる形状検出装置を提供する。
【解決手段】形状検出装置1は、ウェハ保持部20に支持されたウェハ10の外周端部形状を検出する装置であって、ウェハ10の外周端部に対して径方向外側の所定位置に配置されて外周端部を照明する拡散照明部35と、ウェハ10の表面に直交する方向に配置されて外周端部に対向し、拡散照明部35から照射されて外周端部において反射した反射光の径方向に沿った輝度情報を検出する撮像部30と、撮像部30において検出された輝度情報を基にして外周端部形状を算出する演算制御部40とを備えて構成される。
(もっと読む)
201 - 220 / 1,561
[ Back to top ]