
Fターム[2F065JJ22]の内容
光学的手段による測長装置 (194,290) | 受光部 (23,546) | 1つの受光部の素子数 (9,727) | 数個 (171)
Fターム[2F065JJ22]の下位に属するFターム
2個 (75)
Fターム[2F065JJ22]に分類される特許
41 - 60 / 96
空間フィルタを用いた走行被検物測定装置
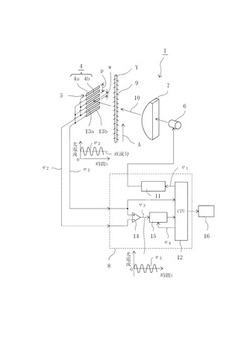
【課題】糸などの連続状被検物の走行速度あるいは走行方向の長さを測定するための空間フィルタを用いた走行被検物測定装置を提供すること。
【解決手段】被検物通過路3を備えたケーシング2を含み、該通過路の一方の側に、被検物の走行方向に等間隔に配置され、入射光を電気信号に変換して出力する複数個の受光素子4でなる受光器5と、該通過路の他方の側に配置され、受光器上に被検物の像を投影する光源6と、光源からの光を通して被検物に当てる光学系レンズ7と、被検物が受光素子の配列間隔に相応する所定のピッチ移動する毎に、周期的に変化する電気信号を出力し、該出力信号を演算処理して走行速度などを測定する演算処理手段8とを搭載し、該演算処理手段が、被検物の真値を予め記憶しておき、測定した値と真値との差から補正値を算出して、これを記憶する記憶手段を含み、検出値を補正値に基づいて補正した値で出力するようにした糸速度センサ。
(もっと読む)
穴形状測定装置および穴形状測定方法

【課題】 穴の全体形状だけでなく、穴の壁面に形成された微細な凹凸形状をも精度良く測定する。
【解決手段】 管状プローブ80からレーザ光を測定対象穴の壁面に照射し、レーザ光の焦点位置と壁面における反射位置とのずれ量(焦点ずれ量)に応じたフォーカスエラー信号を生成するフォーカスエラー信号生成回路111,112を備える。コントローラ100は、管状プローブ80を回転させながらZ方向(管状プローブの中心軸方向)に移動させて、レーザ光を測定対象穴の壁面に螺旋状に照射する。そして、管状プローブ80のZ方向位置と、管状プローブ80の回転角度と、フォーカスエラー信号から得た焦点ずれ量とに基づいて測定対象穴の3次元形状を算出する。
(もっと読む)
表面形状測定装置
【課題】表面形状の微細な凹凸に対応した位置調整が可能な表面形状測定装置を提供することにある。
【解決手段】可動部材300の裏面側に、光源201より照射される光の波長と、集光レンズ205の開口数と、に基づいて決定される最小集光径の円形領域からなり、可動部材300よりも光反射率の高い高光反射部を備え、光源201より照射された光が、全て高光反射部に反射された場合の第1フォトディテクタ402から検出される反射光の強度を最大値として記憶部に記憶し、第1フォトディテクタ402から検出される反射光の強度が、記憶部に記憶された最大値に近づくように、集光レンズ205と可動部材300の相対位置を調整する。
(もっと読む)
変位計測方法とその装置
【課題】
光干渉を用いた変位計測装置において、プローブ光路と参照光路とが空間的に分離して
いるため、空気の揺らぎ等による温度分布や屈折率分布、あるいは機械振動が生じた場合
、両光路間で光路差が変動し、測定誤差となってしまう。
【解決手段】
プローブ光の光軸と参照光の光軸を外乱の影響を受けない距離まで近接させて、プロー
ブ光を対象物に、参照光を参照面に各々照射し、その反射光同士を干渉させ、生じた干渉
光から対象物の変位量を求める
(もっと読む)
欠陥検出方法の高感度化
【課題】光学式欠陥検査装置または光学式外観検査装置で検出した欠陥を電子顕微鏡等で詳細に観察する装置において、観察対象の欠陥を確実に電子顕微鏡等の視野内に入れることができ、かつ装置規模を小さくできる装置を提供する。
【解決手段】光学式欠陥検査装置または光学式外観検査装置で検出した欠陥を観察する電子顕微鏡5において、欠陥を再検出する光学顕微鏡14を搭載し、この光学顕微鏡14で暗視野観察する際に瞳面に分布偏光素子及び空間フィルタを挿入する構成とする。
(もっと読む)
磁気ディスク用ガラス基板の製造方法
【課題】磁気ディスク用ガラス基板の欠陥が両主表面のどちらにあるのかを正確に検出することができる磁気ディスク用ガラス基板の製造方法を提供すること。
【解決手段】本発明の磁気ディスク用ガラス基板の製造方法は、製造された主表面磁気ディスク用ガラス基板を検査する検査工程を含む磁気ディスク用ガラス基板の製造方法であって、前記検査工程において、磁気ディスク用ガラス基板に対して光学式自動外観検査で欠陥の検査を行い、前記光学式自動外観検査で特定された前記欠陥の位置について、磁気ディスク用ガラス基板レーザドップラー干渉計で、前記磁気ディスク用ガラス基板の主表面上の欠陥を検出する。これにより、磁気ディスク用ガラス基板の欠陥が両主表面のどちらにあるのかを正確に検出することが可能となる。
(もっと読む)
変位計測装置
【課題】 回折格子が形成する面内の方向(Y方向)の変位及びその面に垂直な方向(Z方向)の変位を、光源から出射される光から回折格子を用いて複数の回折光を発生させることにより計測できる変位計測装置を提供する。
【解決手段】 第1乃至第3の回折光l1、l2、l3を発生させる第1回折格子GBS0と、被計測物と共に移動可能な第2回折格子GT0と、第2回折格子で回折した第1及び第2の回折光による干渉光を受光する第1受光部PDxと、第2回折格子で回折した第1の回折光と、第1回折格子を透過した第3の回折光とをそれぞれ反射する反射部FMと、反射部で反射され第2回折格子で回折した第1の回折光と、反射部で反射された第3の回折光と、による干渉光を受光する第2受光部PDzと、第1受光部で受光した光に基づいてY方向の変位を算出し、かつ第2受光部で受光した光に基づいてZ方向の変位を算出する演算部CUと、を有する。
(もっと読む)
法線ベクトル追跡型超精密形状測定装置における駆動軸制御方法
【課題】
計測点の座標と法線ベクトルの計測値から被測定物の表面形状を導出し、各軸の制御方法を工夫することによって各計測点での計測時間を短縮し、被測定物の表面形状測定の高速化を図ることが可能な法線ベクトル追跡型超精密形状測定装置における駆動軸制御方法を提供する。
【解決手段】
2軸2組のゴニオメータと、その回転中心間の距離を変える1軸直進ステージとで構成し、1組のゴニオメータは試料系2を構成し、その可動部に被測定物1を保持し、もう1組のゴニオメータは光学系3を構成し、その可動部に光源と光検出器Dを設け、2軸2組のゴニオメータと1軸の直進ステージの内、2軸1組のゴニオメータと1軸の直進ステージは、光検出器からの出力を直接軸駆動モータに入力するフルクローズドフィードバック制御し、残り2軸1組のゴニオメータはセミクローズドフィードバック制御する。
(もっと読む)
光路長の自律校正を用いた法線ベクトル追跡型超精密形状測定方法
【課題】
計測点座標と法線ベクトルの計測値から被測定物の表面形状を導出する法線ベクトル追跡型超精密形状測定方法において、現状の2軸2組のゴニオメータと1軸直進ステージの装置構成を変えることなく、ある測定手順を付加するだけで、自律的に光路長Lを校正によって決定することが可能な光路長の自律校正を用いた法線ベクトル追跡型超精密形状測定方法を提供する。
【解決手段】
各計測点毎に2軸2組のゴニオメータから得られる4つの角度データと1軸直進ステージから得られる1つの距離データとを取得し、計測点の数だけの計測値セットから形状導出アルゴリズムPにより形状を導出する際に、光路長Lを変数として複数の形状P(L)を導出し、形状変化の収束を利用して真の光路長LCと収束形状P(LC)を算出する。具体的には、形状残差の収束性を見ながら二分法により光路長を決定する。
(もっと読む)
加工装置に搭載される被測定物の計測方法および計測装置
【課題】サブミクロンの精度を有する、加工装置に搭載される被測定物の計測方法および計測装置を提供する。
【解決手段】光源1と、この光源1からの光線を2本の光線に分岐する光分岐/合流部2と、被測定物10を設置するステージ部11と光を集光して照射する対物レンズ6と、前記2本に分岐された光線の他の一方が照射される参照ミラー5とを有し、前記被測定物10または前記参照ミラー5の位置を、それぞれ、前記被測定物10からの反射光Aの光軸方向または前記参照ミラー5からの反射光Bの光軸方向に移動させることにより、前記被測定物10からの反射光Aと前記参照ミラー5からの反射光Bの干渉波形を計測し、同時に移動量を計測可能なリニアスケール8の位置情報も計測して、前記参照ミラー5からの反射光Bの光路長と前記被測定物10からの反射光Aの光路長が同一となる位置を、左右対称性の評価式が最小になる位置を求めることで特定する。
(もっと読む)
封筒フラップ封緘検査装置
【課題】未封緘の封筒を高い信頼性で検出でき、環境問題がなく、封筒を損傷せず、生産性の高い封筒フラップ封緘検査装置を提供する。
【解決手段】フラップ先端辺の方向に対して直角方向に封筒を搬送する搬送手段と、封筒の搬送位置を検出する搬送検出手段と、搬送位置を入力しフラップ先端辺の近傍において開となるゲートを生成するゲート生成手段と、搬送経路の上方から封筒表面の変位を所定のサンプリング周期で検出し変位データを出力する変位センサと、ゲートが開となっている間の変位データを記憶する記憶手段と、記憶した変位データに対して差分演算を行い差分変位データを生成する差分演算手段と、差分変位データのすべてが所定値内であるときに封緘状態を良と判定し、それ以外は不良と判定する良否判定手段とを具備する。
(もっと読む)
形状測定用プローブ制御装置
【課題】形状測定装置において、低測定力を維持したまま高速にプローブを測定面に追従させることができ、高速で高精度な測定を実現できる形状測定用プローブ制御装置を提供する。
【解決手段】X制御モード切換スイッチ41とY制御モード切換スイッチ45とを備え、測定物の形状、または測定時のXプローブ傾斜角度θXとYプローブ傾斜角度θYとの関係により、一方の軸で位置制御を、他方の軸で傾き制御を行うようにした。
(もっと読む)
形状測定方法及び形状測定装置
【課題】側面形状測定において形状測定プローブの先端の移動量をレーザ光と4分割フォトダイオードを用いて高精度に測定する。
【解決手段】Z軸に沿って移動可能な形状測定プローブと、該形状測定プローブ内に一点で支持され先端がXY方向の力により傾斜可能でかつレーザ光を反射するミラーを有するスタイラスがあり、反射するレーザ光を4分割フォトダイオードに集光して得られる電気信号出力から該スタイラスの傾斜を検知して該スタイラス先端のXY方向移動量を得る3次元形状測定方法において、実測定に先んじて該電気信号出力から得られるXY方向移動量(TXm,TYm)の生データと真のXY方向移動量(TX、TY)の関係を求める参照テーブル測定工程によって参照テーブルを作成し該参照テーブルを用いて実測定した生データから補正した真のデータを得る。
(もっと読む)
偏心測定方法および装置
【課題】偏心測定方法および装置において、被検レンズ系の被測定面の面間隔の製作誤差の影響を受けることなく、偏心量の測定精度を向上することができるようにする。
【解決手段】第1面の偏心量を算出し、被検レンズ系と投影光学系との光軸方向の相対位置を第1測定位置として取得する第1面偏心測定工程(ステップS2)と、投影光学系を第i面の測定開始位置に相対移動する測定位置移動工程と(ステップS4)、第i面に光源の像を投影し、投影光学系の光軸方向の位置を調整して、第i面での反射光による光源の像を像面に結像させ、この像位置の情報を取得し、被検レンズ系と投影光学系との光軸方向の相対位置を第i測定位置として取得する第i面測定工程(ステップS5)と、面間隔データを実測値に修正したレンズ設計データを用いて、第i面の偏心量を算出する第i面偏心量算出工程(ステップS6)とを備える偏心測定方法を用いる。
(もっと読む)
変位検出装置、露光装置、およびデバイス製造方法
【課題】 例えばガラス基板の表面に付着した異物の影響を抑えて、ガラス基板の面位置の変位を高精度に検出することのできる変位検出装置。
【解決手段】 被検面(20a)の面位置の変位を検出する変位検出装置は、光源(LS)からの光に基づいて対物レンズ(5)により一旦集光点(P)を形成した後に被検面としての物体(20)の表面に照射する照射系(IL:1,2,3,4,5)と、被検面で反射され且つ対物レンズを経た光に基づいて被検面の面位置の変位を検出する検出系(DS:5,4,3,6,7,8,9)とを備えている。
(もっと読む)
光ディスクの表面評価方法及び光ディスク記録再生装置
【課題】 サーボ信号に基づく評価値を用いて光ディスクの光透過層の表面の評価を行う際に、サーボ残差とデータ復号エラーの発生量との相関関係が低いために評価の精度が低いという課題を解決する。
【解決手段】 フォーカスまたはトラッキングのサーボ信号を検出し、検出された前記サーボ信号とその検出時間から前記サーボ信号の推移を検出し、前記サーボ信号の推移から得られたピークのうち、所定の閾値を超えた部分について、前記所定の閾値からのピーク高さをその継続時間と線速度との積で算出される距離で積分し、積分によって得られた積分値を合計して評価値を算出し、該評価値とデータ復号エラーの発生量との相関関係に基づいて、前記光ディスクの光透過層の表面の凹凸を評価する。
(もっと読む)
測定の不明瞭性を解消した部分コヒーレンス干渉計
部分コヒーレンス干渉計は、測定の不明瞭性を解決するためのフォーカシング系を組み込んでいる。焦点検知ビームは、干渉計の測定ビームと共用の対物レンズを通して試験面まで送られ、試験面から戻される。明瞭な測定範囲は、所定の焦点誤差範囲と一致する。 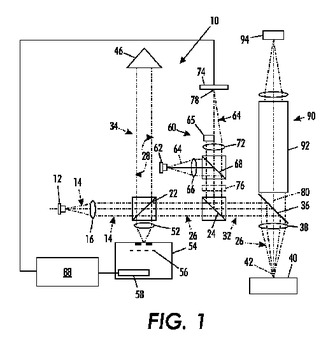 (もっと読む)
(もっと読む)
計測装置
【課題】
被計測物の位置を高精度に計測する計測装置を提供する。
【解決手段】
本発明の計測装置は、被計測物の位置を表す複数の信号を用いて被計測物の位置を計測する計測装置100であって、複数の信号のそれぞれを既知の値と比較することによって歪み係数を演算する歪み係数演算装置11と、歪み係数を用いて複数の信号を補正することにより複数の補正信号を生成する歪み補正部2と、歪み補正部2にて生成された複数の補正信号の二乗和平方根を算出する二乗和平方根演算装置3と、複数の補正信号のそれぞれを二乗和平方根で除すことにより複数の第一の正規化信号を生成する第一の正規化手段と、第一の正規化手段にて算出された複数の第一の正規化信号に基づいて、被計測物の位置を算出する位相演算装置6とを有する。
(もっと読む)
移動体駆動方法及び移動体駆動システム、パターン形成方法及び装置、露光方法及び装置、デバイス製造方法、並びに計測方法
【課題】計測対象面の凹凸に起因する面位置センサの計測誤差の補正データを作成し、該補正データを用いて計測精度が改善される面位置センサを用いて、移動体を高精度に2次元駆動する。
【解決手段】 X干渉計127、Y干渉計16を用いて位置を監視しながらウエハステージWSTを移動させ、センサ72a〜72dを用いてウエハステージ上面に設けられたYスケール39Y1,39Y2のZ位置を計測する。ここで、例えば、2つの面位置センサ72a,72bの計測結果の差より、Yスケール39Y2のY軸方向の傾きが得られる。Yスケール39Y1,39Y2の全面について傾きを計測することにより、それらの2次元凹凸データが作成される。この凹凸データを用いてセンサの計測結果を補正し、該補正済みの計測結果を用いることにより、高精度にウエハステージを2次元駆動することが可能になる。
(もっと読む)
移動体駆動方法及び移動体駆動システム、パターン形成方法及び装置、露光方法及び装置、並びにデバイス製造方法
【課題】面位置計測システムの異常発生時にも、移動体を継続して駆動する。
【解決手段】位置計測システム、例えばZヘッド72b,72d等を用いて、ウエハステージWSTのZ軸方向とXY平面に対する傾斜方向(例えばθy方向)の位置情報を計測し、その計測結果に基づいてウエハステージを駆動制御する。同時に、干渉計システム、例えばZ干渉計43A,43Bを用いて、ウエハステージの位置情報を計測する。位置計測システムの異常が検知された際、又はウエハステージが位置計測システムの計測領域から外れた際には、干渉計システムの計測結果に基づく駆動制御に切り換える。これにより、位置計測システムの異常発生時においても、ウエハステージを継続的に駆動することができる。
(もっと読む)
41 - 60 / 96
[ Back to top ]