
Fターム[2F065LL42]の内容
光学的手段による測長装置 (194,290) | 光学系 (17,149) | 格子 (823) | 回折格子 (629)
Fターム[2F065LL42]の下位に属するFターム
FZP (36)
Fターム[2F065LL42]に分類される特許
301 - 320 / 593
光ロータリアダプタおよびこれを用いる光断層画像化装置
【課題】測定対象からの戻り光の減衰やS/N比の低下を防止することができる光ロータリアダプタ、およびこれを用い、効率よくかつ簡単に分解能の高い断層画像を生成することができる光断層画像化装置を提供する。
【解決手段】固定スリーブと、これに支持され、その一方に傾斜端面を持つ固定側光ファイバと、この傾斜端面と所定間隔離間して配置される固定側コリメータレンズと、固定スリーブに対して回転自在に支持される取付筒と、固定側コリメータレンズに対向して配置され、傾斜端面を持つ回転側光ファイバと、固定側コリメータレンズと回転側光ファイバとの間に、回転側光ファイバの傾斜端面と所定間隔離間して配置される回転側コリメータレンズと、取付筒を回転駆動する回転駆動源とを有し、固定側光ファイバおよび回転側光ファイバの中心軸を、取付筒の回転中心軸に対して、オフセットまたは傾斜させた光ロータリアダプタにより、また、この光ロータリアダプを用いる光断層画像化装置により、上記課題を解決する。
(もっと読む)
多層膜解析装置および多層膜解析方法

【課題】波長依存性を有する多層膜試料の膜厚をより高い精度を測定することが可能な多層膜解析装置および多層膜解析方法を提供する。
【解決手段】波数変換部721は、バッファ部71に格納される波長毎に、波数K1(λ)および波数変換反射率R1’(λ)(=R(λ)/(1−R(λ)))を順次算出し、バッファ部731へ出力する。バッファ部731は、波数変換部721から順次出力される波数K1(λ)と波数変換反射率R1’(λ)とを対応付けて格納する。フーリエ変換部741は、バッファ部731に格納される波数変換反射率R1’(K1)を波数K1についてフーリエ変換を行って、パワースペクトルP1を算出する。ピーク探索部751は、フーリエ変換部741によって算出されたパワースペクトルP1の中に現れるピークを探索し、各ピーク位置に対応する膜厚を取得する。
(もっと読む)
位置合わせ方法及び装置、リソグラフィ装置、計測装置、及びデバイス製造方法
【課題】より小さいアライメントマーカや異なる波長の放射を使用できるようにし、プロセス変動を受けたマーカを検出できる改良アライメントシステムを提供する。
【解決手段】アライメントセンサは、放射ビームを角度分解スキャトロメータに供給する空間干渉性放射源を含む。瞳面は、放射の半径方向位置が基板での入射角を規定し、角度位置が放射の方位角を規定する。検出器は、基板ターゲットの2次元角度散乱スペクトルを測定できるように、2次元検出器であることが好ましい。アライメントは、スキャトロメータに対して基板をスキャンしている間に、散乱スペクトル内でうなりを検出することによって実行される。
(もっと読む)
光学式変位計
【課題】簡易な構成において、対象物表面上の複数箇所の距離や変位を計測する。
【解決手段】レーザ光源14から出射されたレーザ光は、スプリッタ15で向きの異なる二つの光線に分岐され、対象物2の表面上の異なる二つの位置にそれぞれ光スポットを形成する。測定処理部16は、一次元撮像カメラ17のリニアイメージセンサ19の光検出パターンより二つの光スポットの、一次元撮像カメラ17に対する方向を算定し、算定した二つの光スポットの一次元撮像カメラ17に対する方向と、スプリッタ15からの二つの光線の出射方向と、スプリッタ15の位置と、一次元撮像カメラ17の位置とにより、対象物2の表面上の二つの光スポットの位置各々の二次元座標を、三角測量によって算定する。
(もっと読む)
光半導体素子および光半導体素子を用いた光干渉断層画像装置
【課題】0.9〜1.2μmの中心波長の光を発光する、高出力化可能な光半導体素子を得る。
【解決手段】 光半導体素子1を、InP基板10と、InP基板10の上に積層された第一導電型クラッド層11と、第一導電型クラッド層11の上に積層された量子井戸活性層13であって、InGaAsPあるいはAlGaInAsからなる量子井戸層13aと、量子井戸層13aを挟むように積層されているInPあるいはGaInPからなる障壁層13bとを備えた量子井戸活性層13と、量子井戸活性層13の上に積層された第二導電型クラッド層15とを備える構成とする。
(もっと読む)
光学的コヒーレンストモグラフィ
【課題】光学的コヒーレンストモグラフィにおいて機械的運動に影響されることなく、短時間で高品位の解像度の二次元画像を得る。
【解決手段】本発明は、ために、光源およびリニアビーム形成システムが採用された光学的コヒーレンストモグラフィに関する。かかる目的のために、光学的リニアビーム形成システム(20)は、周波数領域の光学的コヒーレンストモグラフィを実施するよう、半円筒形レンズ(21)と、凸レンズ(22)と、スリット(23)とを備える。光源からの平行な光ビームは、半円筒形レンズ(21)の表面に入射し、この凸レンズ(22)の前方には半円筒形レンズ(21)の焦点ラインが位置している。凸レンズ(22)は平行な光成分が収束する短焦点と、発散する光成分が収束する長焦点とを有し、短焦点と長焦点との間にスロット(23)が位置する。
(もっと読む)
糸速度依存パラメータ測定方法
【課題】糸速度依存パラメータを非衝突的に測定する方法である、相関測定方法は特に高い糸速度を測定する場合に多大のコストを必要とするため、これに代わる測定方法を提供する。
【解決手段】糸3に光ビーム2を投射(geworfen)し、そして、散乱によって少なくとも第1光波4を拡散(gestreut)し、検出器6において第1光波4を第2光波5と重畳(Ueberlagerung)させ、第1及び第2光波4、5の周波数間のドップラー偏移(Dopplerverschiebung)を測定する、糸3の速度依存パラメータ測定方法により、解決することができる。
(もっと読む)
オーバレイエラーの測定方法、検査装置及びリソグラフィ装置
【課題】ノイズの効果を低下させ、オーバレイエラーの計算がさらに正確になるオーバレイエラーの代替計算方法を提供する。
【解決手段】複数の回折格子などを含むターゲットマークからの反射放射が、ピクセルのアレイによって検出される。各ピクセルの回折格子のオーバレイエラーが検出され、オーバレイエラーのアレイが割り出される。全ピクセルのオーバレイエラー値を単純に平均するのではなく、フィルタリングが実行される。ピクセルは、オーバレイエラーの検出値又はピクセルの検出強度に従ってフィルタリングすることができる。
(もっと読む)
リソグラフィ装置の位置決めシステムおよび方法
【課題】 位置決めの正確さおよび/または強健性が改善されたリソグラフィ投影装置のアライメント・システムを提供する。
【解決手段】 リソグラフィ装置の位置決めシステムは、位置決め放射線源1、第1検出器チャネルおよび第2検出器チャネルを有する検出システム、および検出システムと連絡する位置決定ユニットを有する。位置決定ユニットは、第1および第2検出器チャネルからの情報を組み合わせて処理し、組み合わせた情報に基づいて、第2オブジェクト上の基準位置に対する第1オブジェクト上の位置決めマークの位置を決定する。
(もっと読む)
3次元形状検出装置
【課題】この発明は、ケーブル等の独自の特徴点が少ない検出対象の画像情報からでも特徴点をより確実に抽出でき、より確実に3次元形状を検出できる3次元形状検出装置を提供することを目的とするものである。
【解決手段】回折格子41は、レーザ光発生器40とケーブル10との間に回動可能に配置されており、レーザ光発生器40のレーザ光を複数のスリット光42からなるパターン光43とする。処理手段は、パターン光43によりケーブル10に付加された複数の輝点10aを特徴点として抽出する。
(もっと読む)
基板位置検出装置、基板位置調整装置、エリプソメータおよび膜厚測定装置
【課題】基板位置検出装置において、装置の大型化を抑制しつつ高速かつ高精度な位置検出を実現する。
【解決手段】膜厚測定装置の基板位置検出装置では、撮像部51の撮像素子511による基板9上の撮像領域が、位置検出部5の撮像部回転機構52により回転される。これにより、基板9を保持するステージを回転する機構を設けることなく、基板9のエッジ92を周方向の複数の撮像位置において容易に撮像して基板9の位置を検出することができる。その結果、基板を水平方向に移動する機構の上に基板を回転させる機構を設ける従来の装置に比べて、膜厚測定装置の基板の位置検出に係る構造の大型化を抑制することができるとともに高速かつ高精度な基板9の位置検出を実現することができる。
(もっと読む)
3次元形状測定装置
【課題】3次元形状の測定精度をより改善できる3次元形状測定装置を提供すること。
【解決手段】本発明の3次元測定装置は、測定対象物を固定するワークステージと、光源、光源から照射された光を透過させる格子及び格子の格子イメージを測定対象物に結像させる投影レンズを含み、測定対象物に対して格子イメージを第1方向にN回入射した後、測定対象物に格子イメージを第2方向にN’回入射する投影部と(N及びN’は2以上の自然数)、結像レンズ及びカメラを含み、測定対象物によって反射される第1方向反射イメージ及び第2方向反射イメージを受信するイメージ取り込み装置と、イメージ取り込み装置に受信された第1方向反射イメージ及び第2方向反射イメージを用いて測定対象物の影領域を補償して測定対象物の3次元状態を算出する制御部と、を含む。
(もっと読む)
移動体駆動方法及び移動体駆動システム、パターン形成方法及び装置、露光方法及び装置、デバイス製造方法、並びに計測方法
【課題】計測対象面の凹凸に起因する面位置センサの計測誤差の補正データを作成し、該補正データを用いて計測精度が改善される面位置センサを用いて、移動体を高精度に2次元駆動する。
【解決手段】 X干渉計127、Y干渉計16を用いて位置を監視しながらウエハステージWSTを移動させ、センサ72a〜72dを用いてウエハステージ上面に設けられたYスケール39Y1,39Y2のZ位置を計測する。ここで、例えば、2つの面位置センサ72a,72bの計測結果の差より、Yスケール39Y2のY軸方向の傾きが得られる。Yスケール39Y1,39Y2の全面について傾きを計測することにより、それらの2次元凹凸データが作成される。この凹凸データを用いてセンサの計測結果を補正し、該補正済みの計測結果を用いることにより、高精度にウエハステージを2次元駆動することが可能になる。
(もっと読む)
マーク検出方法及び装置、位置制御方法及び装置、露光方法及び装置、並びにデバイス製造方法
【課題】物体上の複数のマークを効率的に、かつ高精度に検出する。
【解決手段】ウエハマークを検出するアライメント装置であって、互いに異なる位置に配置された複数の検出領域AL1f〜AL24fの像を撮像素子上に形成し、その撮像素子上に形成されたその像に関する情報を検出する複数のアライメント系と、複数の検出領域AL1f〜AL24fの位置関係を求める装置と、そのアライメント系の撮像信号のうち、その位置関係に基づいてそれぞれ定められる積算領域151X,151Yの撮像信号を積算し、該積算結果に基づいてそのマークの位置情報を求める検出信号処理部とを有する。
(もっと読む)
薄膜コート層膜厚測定方法および膜厚測定装置
【課題】屈折率差の小さいベース樹脂上の光透過性膜を形成してなる被測定物における光透過性コート膜の膜厚を、非接触、非破壊で確実にかつ精度よく測定する膜厚測定方法、この方法を実施するための膜厚測定装置を提供すること。
【解決手段】所望波長領域のスペクトル光を放射する光源からの光を照明領域を制限した顕微鏡光学系を介した対物レンズにより集光し、集光光束をベース樹脂上の光透過性コート膜に垂直入射させ、前記光透過性コート膜表面とベース樹脂表面とにより反射して互いに干渉した反射光を、前記対物レンズを介して顕微鏡光学系に戻し、検出光伝送用ファイバにより分光手段に導いて分光し、分光した分光スペクトル強度から反射率を演算する際に、前記反射率を任意の大きさに拡大することにより前記反射率が極小及び極大となる波長を求め、前記極小と極大を与える各波長と、前記膜の屈折率とに基づき前記光透過性コート膜の膜厚を演算算出することを特徴とする薄膜コート層膜厚測定方法。
(もっと読む)
移動体駆動方法及び移動体駆動システム、パターン形成方法及び装置、露光方法及び装置、並びにデバイス製造方法
【課題】面位置計測システムの異常発生時にも、移動体を継続して駆動する。
【解決手段】位置計測システム、例えばZヘッド72b,72d等を用いて、ウエハステージWSTのZ軸方向とXY平面に対する傾斜方向(例えばθy方向)の位置情報を計測し、その計測結果に基づいてウエハステージを駆動制御する。同時に、干渉計システム、例えばZ干渉計43A,43Bを用いて、ウエハステージの位置情報を計測する。位置計測システムの異常が検知された際、又はウエハステージが位置計測システムの計測領域から外れた際には、干渉計システムの計測結果に基づく駆動制御に切り換える。これにより、位置計測システムの異常発生時においても、ウエハステージを継続的に駆動することができる。
(もっと読む)
光半導体素子、該光半導体素子を用いた波長可変光源および光断層画像取得装置
【課題】製造容易で広帯域な利得スペクトル幅を有する光半導体素子を提供する。
【解決手段】素子内における光の共振が抑制され、n-GaAs基板11上に、少なくともInGaP下部クラッド層とInGaAs活性層が積層されている光半導体素子10において、n-GaAs基板11として面方位が(100)面から(111)B面方向に2度以上10度以下の角度、たとえば3度傾斜しているn-GaAs基板を用いる。InGaP下部クラッド層のステップバンチングが形成され、InGaAs活性層の層厚にばらつきが生じる。
(もっと読む)
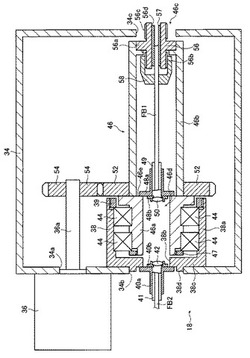
光学特性測定装置・走査光学系ユニット・画像形成装置
【課題】被走査面上を移動するビームスポットの主走査ラインの曲がりや副走査方向の変動を正確に測定することができるようにする。
【解決手段】両リニアエンコーダ82A、82Bの検知位置の差Δtと、両リニアエンコーダの間隔Lから、Yステージの角度誤差変位Δθを求め、各像高での受光装置71による受光部位置を計算する。読み取りヘッド部80A、80BはYステージのガイド部73の端部下面に固定されており、読み取りヘッド部80の近傍に配置された図示しない調整手段により、スケール部81に対する読み取りヘッド部80の最適位置調整(アジマス調整)がなされるようになっている。これにより、受光装置71の移動範囲全体に亘って読み取りヘッド部80の良好な出力を得ることができる。
(もっと読む)
光半導体素子、該光半導体素子を用いた波長可変光源および光断層画像取得装置
【課題】偏波依存性が抑制され、出力が時間的に安定した光を射出する光半導体素子を実現する。
【解決手段】光半導体素子10は、発光中心波長が0.9μm以上1.2μm以下の光を射出可能な光半導体素子であり、InxGa1-xAs基板(X≠1)11と、引張り歪量子井戸活性層15とを備えている。光半導体素子は一般的にTEモードに対する利得を有している。光半導体素子10は、引張り歪を導入することでTMモードでの利得を大きくすることができ、このためTEモードとTMモードに対する光利得のバランスがとれる。
(もっと読む)
位相解析測定を行う装置および方法
位相解析を用いて対象物体を検査するための非接触法および装置。プロジェクタは、検査される対象物体の表面上に光学的パターンを投影する。次いで、光学的パターンが投影される表面の少なくとも第1の画像および第2の画像を得る。表面上の光学的パターンの位相は、対象物体に相対的にプロジェクタを移動することによって前記第1の画像と第2の画像との間で変化される。 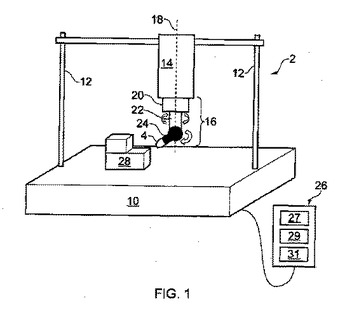 (もっと読む)
(もっと読む)
301 - 320 / 593
[ Back to top ]