
Fターム[2F065LL42]の内容
光学的手段による測長装置 (194,290) | 光学系 (17,149) | 格子 (823) | 回折格子 (629)
Fターム[2F065LL42]の下位に属するFターム
FZP (36)
Fターム[2F065LL42]に分類される特許
501 - 520 / 593
構造光画像化装置
【解決手段】本発明は、画像化される対象物の表面トポグラフィを再構成するために、画像化システムに構造光源を組み込む。構造光源は、或る角度から前記対象物上に1組の線を伝達するための機構を備える。それらの線は、マウスなど、限られた高さを有する対象物に当たると、変位、すなわち、位相シフトされる。この位相シフトは、対象物の構造光情報を提供する。カメラが、この構造光情報を取得する。構造光解析を用いるソフトウェアにより、線の位相シフトから、対象物の表面トポグラフィデータが決定される。 (もっと読む)
光学積層体検査方法,光学積層体製造方法および光学積層体検査装置ならびに光学積層体製造装置

【課題】基板上に反射層と少なくとも1層以上の光透過性薄膜層を積層してなる光学積層体における各層の膜厚を簡便に検査可能にする。
【解決手段】光学積層体4を構成するAg全反射層は、可視光領域では高い反射率を示すが、短波長ではやや低く、長波長ほど高い反射率スペクトルとなる。このようなAg反射膜を、等ピッチの溝を有するプラスチック基板上に形成した場合、溝による回折に起因した反射率の低下が見られる。この反射率の低下は溝深さが深いほど反射率の低下度合いが大きくなり、溝のピッチを小さくすると、ピッチにほぼ比例して反射率が低下する波長が小さい方へとシフトする。この現象を利用して、光学積層体4を構成する光透過性薄膜層側から検査用光を入射させ、各層までの光路長の変化に応じて変化する各層からの反射光の光強度を測定し、特定波長の反射光強度に基づいて膜厚を検査する。
(もっと読む)
マルチビーム光学式測距センサおよびそれを備えた自走式掃除機、エアコンデョショナ
【課題】 小型化と検出時間の短縮を図れるマルチビーム光学式測距センサを提供する。
【解決手段】 このマルチビーム光学式測距センサによれば、回折格子4が、発光素子2の出射光を複数のビームa〜eに分離するから、1つの発光素子2でも回折格子4からは複数のビームa〜eを出射させることができる。したがって、このマルチビーム光学式測距センサによれば、従来に比べて、発光素子2と発光側レンズ3の個数を削減できて、発光側スペースの削減を図れ、小型化を図れる。また、この測距センサによれば、複数の発光素子をスキャンする必要も無いので、検出時間の短縮を図れる。
(もっと読む)
ディスク原盤の製造方法、ディスク原盤の製造装置、ディスク原盤の移動距離差検出方法、およびディスク原盤の移動距離差検出装置
曲率をもって移動する水平移動デバイスを使用して正確なディスク原盤の送り精度を実現する、ディスク原盤の製造方法を提供すること。 レジスト原盤108を自転させる工程と、前記レジスト原盤108を移動させる工程と、前記移動に伴う前記レジスト原盤108の中心点の軌跡上の移動距離を読みとる工程と、前記中心点の軌跡上の移動距離と、前記移動に伴う前記レジスト原盤108の中心点の直線上の移動距離との差を検出する工程と、前記検出結果に基づいて、所定の製造パラメータを制御する工程とを備える、ディスク原盤の製造方法。 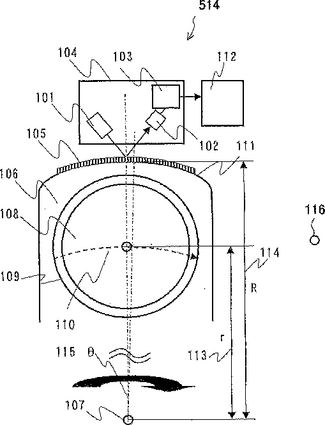 (もっと読む)
(もっと読む)
FBG歪センサシステム
【課題】波長可変光源を往復掃引させ、その掃引方向の違いによって生じる波長ずれの差を検出することによって、例えFBGまでの光路長が不明な場合であっても測定対象の歪み測定を高速かつ正確に行えるとともに、FBGまでの光路長の測定をも可能にしたFBG歪センサシステムを提供する。
【解決手段】波長可変光源10が短波から長波へ掃引している期間に受光器14から出力される電気信号bと波長可変光源10の発振波長からFBG13a〜cの反射波長を第1の仮の反射波長λTUとして測定し、かつ、波長可変光源10が長波から短波へ掃引している期間に受光器14から出力される電気信号bと波長可変光源10の発振波長からFBG13a〜cの反射波長を第2の仮の反射波長λTDとして測定して、この第1の仮の反射波長λTU及び第2の仮の反射波長λTDと波長可変光源10の発振波長の掃引特性とに基づいてFBG13a〜cの反射波長λFを求める。
(もっと読む)
干渉縞解析方法、干渉縞解析装置、干渉縞解析プログラム、干渉測定装置、投影光学系の製造方法、投影露光装置、及びコンピュータ読み取り可能な記録媒体
【課題】本発明の目的は、従来と同じ演算式を用いながらも干渉縞の位相分布を高精度に求めることのできる干渉縞解析方法を提供することにある。
【解決手段】本発明の干渉縞解析方法は、干渉縞の位相をシフトさせながらその干渉縞の輝度分布データを繰り返し取得する干渉測定系に適用される干渉縞解析方法であって、前記干渉測定系が取得した輝度分布データ群に生じているドリフト誤差を補正する補正手順(S12,S11)と、前記輝度分布データ群と所定の演算式とに基づき前記干渉縞の位相分布を算出する算出手順(S13)とを含むことを特徴とする。
(もっと読む)
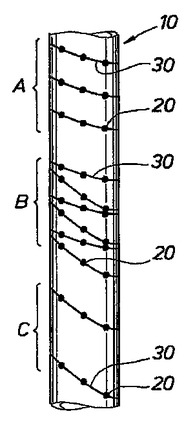
円筒構造への歪センサーの装着方法
各種力の負荷に伴って構造の変形をモニター及び画像化するために複数の歪センサー又はセンサーを構造に装着する好ましい装着方式を決定する方法を開示する。
 (もっと読む)
(もっと読む)
FBGセンサモジュール及び同モジュールを用いた監視システム
【課題】 計測地点の数が多い場合でも、正確な計測を行うためのFBGセンサモジュール及び同モジュールを用いた低コストな監視システムを得ることを目的とする。
【解決手段】 FBGセンサモジュール13は、天板4と、設置面に接地されて天板4を支持する支持体5と、天板4がたわんだ場合に天板4に当接することで所定のたわみ量となるように調整するストッパ8と、天板4に取り付けられたFBGセンサ6、7を備えている。天板4のたわみ量に応じてFBGセンサ6、7が歪み、FBGセンサ6、7の反射波長が所定量分だけ変化する。
(もっと読む)
変位計測方法とその装置
【課題】
光干渉を用いた変位計測装置において、プローブ光路と参照光路とが空間的に分離しているため、空気の揺らぎ等による温度分布や屈折率分布、あるいは機械振動が生じた場合、両光路間で光路差が変動し、測定誤差となってしまう。
【解決手段】
プローブ光の光軸と参照光の光軸を外乱の影響を受けない距離まで近接させて、プローブ光を対象物に、参照光を参照面に各々照射し、その反射光同士を干渉させ、生じた干渉光から対象物の変位量を求める
(もっと読む)
ファイバーブラッグ回析格子センサー
光ファイバー歪みセンサー、その製造方法および歪みを検知する方法。その中に形成された少なくとも第1および第2のファイバーブラッグ回析格子(FBG)を有する光ファイバーを、第1FBGでの回析格子周期が圧縮しおよび第2FBGでの回析格子周期が拡大するように、歪み誘導力に付し;次いで第1および第2FBGに光学的に問合わせて、各々、第1および第2FBGのピーク反射波長を決定しうる;それによって、第1および第2FBGのピーク反射波長間の分離が誘導された歪みの代表となることを供することを含む、歪み検知方法。  (もっと読む)
(もっと読む)
変位検出装置及び変位計測装置並びに定点検出装置
【課題】 光源から出射された光を検出側に伝送する光ファイバの屈曲やストレスによる偏波の乱れの影響を減少させることにより高精度な変位計測を可能とする変位計測装置を提供する。
【解決手段】 偏光解消素子13は、光ファイバ15の出射端15bから出射されたビームの偏光を無偏光にすることにより、偏光を解消する。光ファイバ15が外部の力を受けて屈曲されることにより伝送ビームの偏波が乱れても、またストレスが加えられて伝送ビームの偏波が乱れても、偏光解消素子13は出射端15bから出射された後の伝送ビームを無偏光にして偏光を解消する。つまり、この変位計測装置10は、光ファイバ15の屈曲やストレスによる偏波の乱れを減少することができる。
(もっと読む)
検出装置、光路長測定装置、光学部材評価方法、温度変化検出方法
波長分散や光路長等の光学特性を高速に評価することのできる検出装置、光路長測定装置、光学部材評価方法等を提供することを目的とする。 また、他の目的は、化学・生体反応および温熱効果を高精度に評価できる検出装置、温度変化検出方法を提供することにある。 検出装置10Aでは、被測定物Sの波長分散を受けたゼロ次光B0と、周波数をシフトさせた一次光B1とを重ね合わせ、これによって低周波のビートを発生させ、そのビート位相の波長依存性を測定するようにした。さらに、周波数シフター12からの交流電気信号を位相基準信号とし、測定信号の相対的な位相を検出するようにした。また、互いに波長が異なる測定光と参照光をそれぞれ周波数シフトさせ、測定光のビート位相を、参照光のビート位相を基準として相対的に求めるようにすることも有効である。  (もっと読む)
(もっと読む)
光ファイバセンサ装置
【課題】 光ファイバに多数個のセンサを設けることが可能で、短距離から長距離まで広範囲に測定することができ、かつ、低価格で汎用性のある光ファイバセンサ装置を提供する。
【解決手段】 監視対象2の歪を、光ファイバ11によって検出する光ファイバセンサ装置1において、光ファイバ11のコア11a内に設けられた一枚ないし複数枚の屈折率変化によるフレネル反射板12a,12aを前記軸線に対して直交するように対向配置した一つ又は複数の歪センサ部12と、この歪センサ部12を監視対象2の歪測定部位に取り付ける取付部材21と、この歪センサ部12に向けて単一波長の光を照射する光源LDと、反射板12aによって反射された光を受光する受光部PDと、この受光部PDによって受光された反射光の強度変化の有無から、監視対象2の歪の有無を判断する信号処理部15とを有する。
(もっと読む)
物体の表面形状の決定システム及び方法、並びに所定形状の表面を有する物体の製造方法
【課題】物体の表面形状を測定する方法を提供する。
【解決手段】表面形状を決定するためのシステム及び方法は、測定光に分散を生じさせる色結像光学系を含む。物体の表面に異なる入射方向から入射する、異なる波長の測定光を生成し、検査される表面から出て、検出器により受け取られる測定光に含まれる色情報から、検査される表面の形状を決定する。
(もっと読む)
ワイヤケーブル、並びに張力測定システム及び張力測定方法
【課題】 構造物に使用されるワイヤケーブルの正確な張力を遠隔地に居ながらにして所望の時に測定する。
【解決手段】 複数の素線を縒り合わせたワイヤケーブルに関し、その軸方向の歪を検出する歪検出手段を、当該ワイヤケーブルに組み込む。この歪検出手段として、光ファイバケーブル2により形成された光ファイバーセンサ3を使用する。この際、前記ワイヤケーブルの伸縮に伴って変形するよう前記ワイヤケーブルに組み込み、光ファイバーセンサ3の変形により、入射された光の周波数の変化、もしくは光の反射、屈折又は干渉を検知する。
(もっと読む)
微細な試料を可視化する装置と方法、微細な格子の乱れを可視化する装置と方法
【課題】 複雑で高価な装置を用いることなく光を用いた観察によって微細な試料を可視化することが可能な技術を提供する。
【解決手段】 本発明の装置は微細な試料を可視化する装置であって、試料を載置可能な載置面を備え格子状に変化する光透過特性の分布を備える載置板と、載置板に光を照射する光源と、載置面と略平行な撮像面に形成される像の画像データを取得する画像データ取得手段と、取得した画像データを復元する復元装置を備えている。その復元装置は、取得された画像データを光学系を伝達したことによって劣化した画像として扱い、原画像への復元処理を行う。その復元装置は、劣化画像の分布、原画像の分布を、確率密度関数の分布として捉え、伝達関数を条件付確率の確率密度関数として捉える。上記の確率密度関数についてのBayesの理論に基づく関係式から、劣化画像の分布に対して最大に尤もらしい原画像の分布を反復計算によって算出する。
(もっと読む)
光ファイバ負荷検知能力を備えた医療装置システム
その遠位端に少なくとも2つの光ファイバ・センサが配置された変形体(5)が、器官または血管の壁組織との接触から生じる遠位端の曲がりによって生じる、光ファイバ・センサの光学特性の変化が検出されるのに応答して、多次元力ベクトルを計算するようにプログラムされたプロセシングロジック(6)に結合されている、器官または血管を診断または治療するための装置が提供される。力ベクトルは、ロボット・システム(3)を用いて、直接または自動的な変形体の操作を容易にするのに利用可能である。  (もっと読む)
(もっと読む)
2つの回折次数による画像化に基づいたターゲット取得およびオーバレイ測定
【解決手段】一実施形態では、取得ターゲットもしくはオーバレイまたはアライメント半導体ターゲット(404)を画像化するためのシステムが開示されている。そのシステムは、波長λを有する少なくとも1つの入射ビーム(402)を、特定のピッチpを持つ構造を有する周期的なターゲット(404)に向けるためのビーム発生器を備える。少なくとも1つの入射ビーム(402)に応じて、複数の出力ビーム(406)が、周期的なターゲット(404)から散乱される。そのシステムは、さらに、ターゲット(404)からの第1および第2の出力ビーム(412a、412b)のみを通すための結像レンズ系(410)を備える。画像化システムは、第1および第2の出力ビーム(412a、412b)が、正弦波画像(414)を形成するように、捕捉されたビームの間の角度分離と、λと、ピッチとが選択されるよう適合される。そのシステムは、さらに、1または複数の正弦波画像(414)を画像化するためのセンサと、少なくとも1つの入射ビーム(402)を1または複数のターゲット(404)に向けるように、ビーム発生器を制御すると共に、1または複数の正弦波画像(414)を解析するための制御部とを備える。 (もっと読む)
特性シグナチャのマッチングによる光波散乱計測方法
【課題】計測された回折スペクトルと特性領域における複数のシミュレートされた回折スペクトルとの類似性を比較して、格子構造パラメータを決定する方法を提供する。
【解決手段】光波散乱計測方法は、A)格子構造パラメータを入力し、B)前記パラメータを基礎として入射光値に渡り回折形状を計算し、C)前記パラメータのうち1以上を増分的に変更し、D)ステップBを繰り返し、変更された格子構造パラメータを基礎として前記入射光値に渡り追加的な回折形状を計算し、E)増分的に増大する格子構造パラメータ値の変更が回折形状内にしきい値を超える変化を発生させる、計算された回折形状の特性領域を識別し、F)計算された回折形状の特性領域をライブラリに格納し、H)サンプル基板上で光波散乱計測を実行し、入射光値に渡って散乱シグナチャを生成し、G)散乱シグナチャをライブラリ内の計算された回折形状と比較し、H)選択された類似レベルまで散乱シグナチャとマッチする、計算された回折形状を識別する。
(もっと読む)
赤外線検出機構を搭載するカメラ
【課題】 赤外線検出機構をカメラに内蔵する上で、適切な配置箇所を提案する。
【解決手段】 本発明のカメラは、下記の撮像部、焦点検出部、赤外線検出部、および制御部を備える。撮像部は、撮影光学系を介して被写体を撮像する。焦点検出部は、被写体について焦点検出を行う。赤外線検出部は、焦点検出部が取り込む焦点検出用の光束から赤外線を検出し、赤外線の検出結果に基づいて人物の画面内位置を判定する。制御部は、人物の画面内位置に重点を置いて、焦点制御および/または露出制御を実施する。
(もっと読む)
501 - 520 / 593
[ Back to top ]