
Fターム[2F065LL59]の内容
光学的手段による測長装置 (194,290) | 光学系 (17,149) | テレセントリック光学系 (300)
Fターム[2F065LL59]に分類される特許
1 - 20 / 300
部品実装装置および部品実装方法
【課題】物体の形状認識を正確に、かつ、高速に行うことのできる部品実装装置を提供する。
【解決手段】撮像部10と、輝度変化光を斜めから照射する照射部20と、対象物および基準点42を撮像部および照射部に対し第二方向に相対的に移動させて、対象物および基準点を撮像対象領域に対して通過させる移動部40と、基準点データと対象物データとを取得するデータ取得部と、それぞれの撮像のタイミングT1〜T4での基準点位置と基準点基位置との位置ずれを導出する位置ずれ導出部と、それぞれの撮像のタイミングの対象物基位置に対して、導出された位置ずれを加算して得られた対象物の測定部位の位置に対応する輝度値を取得する輝度値取得部と、取得された輝度値に基づいて、位相シフト法による波形を作成する波形作成部とを備える。
(もっと読む)
エンコーダ装置、光学装置、及び露光装置

【課題】回折格子を用いて計測を行う際に、相対位置を予め定められた相対位置からの絶対位置として容易に計測する。
【解決手段】エンコーダ10Xは、第1部材6に設けられ、格子パターン12Xa及び基準パターン13XAが形成された回折格子12Xと、計測光MX1,MX2を供給するレーザ光源16と、第2部材7に設けられ、計測光MX1,MX2を格子パターン面12Xbにθy方向(X方向)に対称な角度で傾斜させて入射させる傾斜ミラー32X,34Xと、計測光MX1,MX2の回折格子12Xによる回折光DX2,EX2を受光する光電センサ40XA,40XBと、を有する。
(もっと読む)
部品実装基板生産装置、および、三次元形状測定装置
【課題】高精度かつ高速に測定対象物の三次元形状を測定する部品実装基板生産装置および三次元形状測定装置を提供する。
【解決手段】部品実装装置であって、撮像部であるカメラ200と、輝度変化光を発する発光部130と、測定対象物の表面における輝度変化光の輝度分布を相対的に第二方向に移動させるヘッド100と、測定対象物との間の距離が維持されるように配置された基準面部113と、基準面部113の基準面部位の少なくとも1点の輝度変化光を撮像した結果である基準面データおよび対象物データを取得するデータ取得部160と、基準面データおよび基準面部113の反射率と基準輝度値とを用いて、基準面部113の第三方向におけるずれ量を算出するずれ量算出部170と、ずれ量を用いて測定部位における光の輝度値を補正する補正部180と、補正された輝度値を用い、位相シフト法に用いられる波形を作成する波形作成部190とを備える。
(もっと読む)
部品実装基板生産装置、および、三次元形状測定装置
【課題】高精度かつ高速に測定対象物の三次元形状を測定する部品実装基板生産装置および三次元形状測定装置を提供する。
【解決手段】部品実装装置であって、撮像部であるカメラ200と、輝度変化光を発する発光部130と、測定対象物の表面における輝度変化光の輝度分布を相対的に第二方向に移動させるヘッド100と、測定対象物との間の距離が維持されるように配置された基準面部113と、基準面部の基準面部位の少なくとも3点の輝度変化光を撮像した結果である基準面データおよび対象物データを取得するデータ取得部160と、基準面部における光の輝度分布と基準輝度分布との位相差から、基準面部の所定の位置からの第三方向におけるずれ量を算出するずれ量算出部170と、ずれ量を用いて測定部位における光の輝度値を補正する補正部180と、補正された輝度値を用い、位相シフト法に用いられる波形を作成する波形作成部190とを備える。
(もっと読む)
形状計測装置、及び形状計測装置の調整方法
【課題】正確に調整可能な形状計測装置を提供する。
【解決手段】第1の光を発する第1の発光部11、及び第2の光を発する第2の発光部12と、第1の光及び第2の光を受ける格子3と、平坦な基板が配置されるステージ14と、格子3を透過した第1の光を第1の入射角で基板表面に入射させ、格子3を透過した第2の光を第2の入射角で基板表面に入射させる投影光学系5と、第1の光による基板表面の格子3の第1の変形像、及び第2の光による基板表面の格子3の第2の変形像に基づき、基板表面の高さ方向の位置を算出する高さ算出部と、基板表面の高さ方向の位置が投影光学系5の焦点位置と一致するよう、ステージ14を移動させる移動装置15と、を備える、形状計測装置。
(もっと読む)
部品実装装置、および、三次元形状測定装置
【課題】影の影響を除去し正確に位相シフト法による三次元データを高速に取得する。
【解決手段】直交する第一方向と第二方向とに撮像画素が行列状に並ぶエリアイメージセンサ111を有するカメラ101と、カメラ101と測定対象物200とを第一方向に相対的かつ連続的に移動させる移動手段102と、第一アングルで第一周期光を照射する第一照射手段131と、第二アングルで第二周期光を照射する第二照射手段132と、第一照射時間と第二照射時間とが重ならないように制御する照射制御手段104と、エリアイメージセンサ111の複数の第一ライン171を用い、第一照射手段131が照射する際の対象部分の像を取得し、複数の第二ライン172を用い、第二照射手段132が照射する際の像を取得する像取得手段105とを備える。
(もっと読む)
位置検出装置、位置検出方法、露光装置、露光方法およびデバイス製造方法
【課題】反射面を通過した光束に発生する偏光成分による相対的な位置ずれなどの影響を実質的に受けることなく、被検面の面位置を高精度に検出することのできる面位置検出装置。
【解決手段】投射系は、第1反射面7b,7cを有する投射側プリズム部材7を備えている。受光系は、投射側プリズム部材に対応するように配置された第2反射面8b,8cを有する受光側プリズム部材8を備えている。第1反射面および第2反射面を通過した光束の偏光成分による相対的な位置ずれを補償するための位置ずれ補償部材をさらに備えている。
(もっと読む)
パターンの描画条件導出方法及びパターン描画装置
【課題】パターンのムラ欠陥の生じない描画条件を導出し、製品の歩留まりを向上する。
【解決手段】基板上に描画するパターンのムラ欠陥が発生しない描画条件を導出する方法であって、基板上に形成するパターンを生成するパターン情報生成工程S1と、パターンに対して、複数の描画項目の組み合わせによる、2通り以上の描画条件を設定する描画条件設定工程S2と、前記生成されたパターンを抜き取り、補助基板上に、前記各描画条件のもとに、矩形領域をなす補助パターンを形成する補助パターン描画工程S3と、補助基板に対して照明光を入射し、補助パターンから生じる回折光を光電変換素子にて画像として取得し、ムラ欠陥に関するムラ評価値とムラ発生周期とを求めことにより、複数の描画条件の中からムラ欠陥が生じない描画条件を導出する描画条件判定工程S4とを含むパターンの描画条件導出方法である。
(もっと読む)
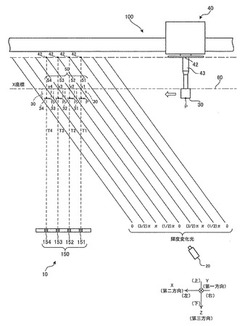
長さ測定装置
【課題】搬送中の長尺材の長さを精度よく測定することができる長さ測定装置を提供する。
【解決手段】長さ検出装置1は、搬送ライン2の搬送方向上流側に設けられた通過検出部3と、搬送方向下流側に設けられた位置検出部4と、長尺材の長さを算出する算出部5と、演算部5等を制御する制御部6を備えている。通過検出部3は、搬送ライン2に向けて投光する複数の通過投光部31と、搬送ライン2を挟んで通過投光部31と対向して設けられた複数の通過受光部32とをセットで具備している。位置検出部4は、搬送方向にほぼ直交する光を搬送ライン2に向けて投光し、該光を該搬送方向に平行走査する投光部41と、該投光部41と搬送ライン2を挟んで対向し、該投光部41からの光を受光する受光部42とを具備している。
(もっと読む)
3次元シーンの要素の奥行きを評価する装置
【課題】3次元シーンに分布した被写体要素(object element)の奥行きを評価するための有利な装置を提案すること。
【解決手段】装置は、光学系であって、それ自体が、複数の画素21、22、23を有する光センサ2、および光センサの画素の1つの上にシーンの要素E1、E2、E3を結像できるレンズ1を備える光学系と、この要素からきてビットマップ方式の光センサの画素のうちの1つによって取り込まれた光のストリームの最大値に着目することによって焦点を調整できるシーンの要素のいずれか1つに光学系の焦点を調整する手段と、この焦点の調節からこの要素の奥行きを推定するのに適した手段とを備える。
(もっと読む)
エンコーダ装置、光学装置、及び露光装置
【課題】回折格子を用いて計測する際に、干渉用の光学系をコンパクトに配置可能として、かつ格子パターン面の高さ変化に対する干渉光強度の低下を抑制する。
【解決手段】エンコーダ10Xは、第1部材6に設けられたX軸の回折格子12Xと、計測光MX1,MX2を回折格子12Xの格子パターン面12Xbにほぼ垂直に入射させるレーザ光源16と、第2部材7に設けられて、回折格子12Xから計測光MX1によって発生する回折光DX1を回折格子12Xに再度入射させる直角プリズム26Aと、回折光DX1によって発生する回折光DX2と他の回折光EX2との干渉光を検出する光電センサ40Xと、を備える。
(もっと読む)
形状測定装置および形状測定方法
【課題】検出用走査を行うことなく、ワンショット撮影により、高さ方向のダイナミックレンジの大きい、被検面の1ライン上の微細な凹凸形状情報を容易に取得し得る、形状測定装置および形状測定方法を提供する。
【解決手段】 空間的にインコヒーレントで広帯域スペクトルを有する光を射出する面状の光源10からの照明光を、対物レンズ13A、Bを介して参照面14および被検面20に照射し、得られた参照光と測定光を干渉させ、その干渉光をスリット16Aにより線状に整形し、分光器16により分光し、2次元撮像手段17により得られたスペクトル干渉情報に基づき被検面20の形状を解析する。光源10、被検面20、スリット16A、および光源10、参照面14、スリット16Aは各々互いに共役である。被検面20を介する系路の光路長と、参照面14を介する経路の光路長との間にオフセットが設けられる。
(もっと読む)
エンコーダ装置、光学装置、及び露光装置
【課題】光学系の高さを低くするとともに、回折格子からの0次光の影響を低減して計測精度を向上する。
【解決手段】X軸のエンコーダ10Xは、第1部材6に設けられ、X方向を周期方向とする回折格子12Xと、可干渉性のある計測光MX1及び参照光RX1を供給するレーザ光源16と、第2部材7に設けられ、計測光MX1を回折格子12Xに向けてリトロー角から所定角度ずれた角度で反射する傾斜ミラー32XAと、回折格子12Xからの回折光と参照光RX1との干渉光を検出する光電センサ40XAと、光電センサ40XAの検出信号を用いて第1部材6に対する第2部材7のX方向の相対移動量を求める計測演算部42Xと、を備える。
(もっと読む)
測定装置、形状測定装置、形状測定方法、及び構造物の製造方法
【課題】凹部の内側の情報に関する測定精度を向上させる。
【解決手段】形状測定装置は、撮像素子5と、複数の光学素子を含み、撮像素子5と共役な共役面10を、複数の光学素子の配列方向に対して鋭角または鈍角の関係となるように形成する結像光学系6と、測定対象面に対して結像光学系6の少なくとも一部を移動可能な走査部と、走査部の位置情報及び撮像素子5の画像情報に基づいて、測定対象面の位置情報を取得する位置情報取得部と、を備える。
(もっと読む)
基板の外観検査装置および外観検査方法
【課題】微小な電子部品であっても、その外形を示すエッジを正確に検出することができる基板の外観検査装置および外観検査方法を提供する。
【解決手段】照明パターン選択手段(照明パターン選択部47)は、複数の方向からの照明光を同時に照射する照明パターン1と、照明パターン1よりも高い輝度で複数の方向からの照明光を別々に照射する照明パターン2と、から照明光照射手段(照明20)による照明光の照射パターンを選択し、画像取得手段(カメラ10)は、照明パターン2が選択された場合には、別々に照射された複数の方向別の照明光毎に画像を取得する。このようにして取得した画像には、電子部品の実装面に略平行な面(上面)および実装面に略垂直な面(側面)により形成されるエッジが、電子部品の側面からの拡散光によって電子部品の外形として表され、エッジ検出手段(エッジ検出部48)はこれらの画像から電子部品の外形を示すエッジを検出する。
(もっと読む)
3次元計測方法
【課題】平面精度が低い基板上に生成された、直径数十ミクロン程度のサイズのバンプの3次元計測を可能とする。
【解決手段】測定対象に固有の傾斜角で固有の色相光を投光し、固有の傾斜角で傾斜した視軸のカラーラインセンサカメラで撮像し、得られた画像画素の色相光反射強度基準化比率から、測定対象の表面パッチ傾斜角を算出し、表面パッチ傾斜角から表面パッチの高さを算出する3次元計測法において、まず光拡散表面を有する球状モデルを対象として、色相光反射強度基準化比率と表面傾斜角の対応表を作成し、未知の測定対象を撮像した画像画素の色相光反射強度基準化比率から表面パッチの傾斜角を算出し、傾斜角から表面パッチの高さを算出し、これをスキャン方向に沿って加算して縦断面高さデータを算出し、縦断面高さデータを対象横幅に亘って集積して、未知の測定対象の3次元計測を行う。
(もっと読む)
カム表面の観察方法
【課題】カム表面を観察することのできる、広視野レーザ顕微鏡を用いた新規のカム表面の観察方法を提供する。
【解決手段】テレセントリックfθレンズ8の焦点面近傍に近接配置したカム表面10からの反射光をテレセントリックfθレンズ8により平行光束に変換し、走査ミラー7で反射させた後に、結像レンズ11によって集光してテレセントリックfθレンズ8の焦点面と共役の位置に設置したピンホール12aを通過させ、ピンホール12aを通過した反射光の光量を受光素子13で計測する。カム表面10を有するカムシャフト9をその軸zを中心に回転させるとともに、レーザ光に対してカム表面10が常に垂直になり、かつ、レーザ光の焦点が常にカム表面10に位置するように、カムシャフト9を移動させながら観察する。
(もっと読む)
検査装置および方法、リソグラフィ装置、リソグラフィ処理セル、およびデバイス製造方法
【課題】オーバーレイ測定、非対称性測定、およびインダイオーバーレイターゲットの再構築を可能にする。
【解決手段】四分くさび光デバイス(QW)は、基板から散乱した放射の回折次数を別々に再誘導し、第1方向および第2方向の各々に沿って照明から回折次数を分離する。例えば、0次(0、0’)および1次(−1、+1’)を、各入射方向について分離する。マルチモードファイバ(MF)での捕捉の後、スペクトロメータ(S1−S4)を使用して波長(I0’(λ)、I0(λ)、I+1’(λ)、およびI−1(λ))の関数としての空間的に再誘導された回折次数の強度を測定する。そして、これをオーバーレイエラーの計算、または単一格子の非対称パラメータの再構築に用いる。
(もっと読む)
光学走査プローブ
【課題】対象物を光ストライプで照射し、対象物表面から反射した光を検出することで、対象物の表面上の複数の点からデータを捕捉するための走査プローブを提供する。
【解決手段】走査プローブは、(a)光ストライプを生成および発するためのストライプ生成手段14、(b)対象物表面から反射した光ストライプを検出するための画素の配列を有する画像センサを備えるカメラ16、(c)カメラ16によって検出された強度に応じて、フレームの取得中に光ストライプの強度を調節するための手段を備える。ストライプ長を修正する手段、処理手段のための隔離された区分室、およびスキャナのための取り付け可能なダストカバーを有するスキャナにも関する。
(もっと読む)
検査装置及び検査方法
【課題】デバイスが形成されている半導体基板の全面について厚さムラを短時間で検査することができる検査装置を実現する。
【解決手段】本発明による検査装置は、半導体基板(7)のデバイス形成面とは反対側の裏面(7a)に向けて、前記半導体基板に対して半透明な照明光を照射する照明手段(1,2,3)と、半導体基板の裏面に入射し、デバイス構造面(7b)で反射し、前記裏面側から出射した照明光を受光する撮像手段(15)と、 撮像手段からの出力信号を用いて厚さムラを検出する信号処理装置(20)とを具える。信号処理装置は、前記撮像手段からの出力信号を用いて、半導体基板に形成されているデバイスの半導体基板の裏面側から撮像した2次元画像を形成する手段(21)と、撮像されたデバイスの2次元画像と基準画像とを比較し、画像比較の結果に基づいて前記半導体基板の厚さムラを検出する厚さムラ検出手段(22,23,24)とを有する。
(もっと読む)
1 - 20 / 300
[ Back to top ]