
Fターム[2F065NN02]の内容
光学的手段による測長装置 (194,290) | 制御 (2,523) | 光強度の (880) | 光源出力 (595)
Fターム[2F065NN02]に分類される特許
141 - 160 / 595
光学式検出装置、表示装置及び電子機器
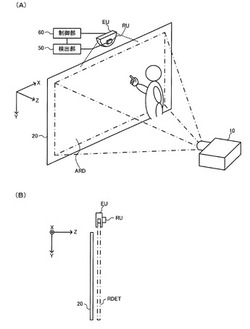
【課題】広い範囲での対象物のセンシングが可能な光学式検出装置、表示装置及び電子機器等の提供。
【解決手段】光学式検出装置は、光源光を出射する光源部と、光源部からの光源光を曲線状の導光経路に沿って導光する曲線形状のライトガイドと、ライトガイドの外周側から出射される光源光を受け、曲線形状のライトガイドの内周側から外周側へと向かう方向に照射光の照射方向を設定する照射方向設定部と、照射光が対象物に反射されることによる反射光を受光する受光部RUと、受光部RUでの受光結果に基づいて、少なくとも対象物が位置する方向を検出する検出部50を含む。
(もっと読む)
位置検出機能付き機器

【課題】対象物体が検出用光源を配置した領域の外側にあるのか内側にあるのかを検出することのできる位置検出機能付き機器を提供すること。
【解決手段】位置検出機能付き機器1の光学式位置検出装置10において、検出用光源部12が検出光L2を出射した際に対象物体Obで反射した検出光を光検出部30で検出して対象物体Obの座標を検出する。検出空間10Rからみたときに、光検出部30は、複数の検出用光源部12より内側に位置するとともに、複数の検出用光源部12は各々、外側発光素子12A1〜12D1と内側発光素子12A2〜12D2とを備えている。従って、外側発光素子12A1〜12D1が点灯した際の光検出部30での受光強度と内側発光素子12A2〜12D2が点灯した際の光検出部30での受光強度との比較結果に基づいて対象物体Obが検出用光源部12より外側あるいは内側のいずれに位置するかを判定することができる。
(もっと読む)
形状計測装置およびキャリブレーション方法
【課題】計測点の位置の違いによる法線算出の誤差を可及的に小さくし、計測対象物の3次元形状を精度良く算出するための技術を提供する。
【解決手段】形状計測装置は、カメラ1で撮像を行うことにより得られた画像から、計測対象物4の表面上の複数の注目点について特徴量を算出し、記憶装置62に予め記憶されているデータを参照して特徴量の値から法線の向きを算出し、その算出結果から計測対象物4の表面の3次元形状を復元する。ここで、記憶装置62は、カメラ1の視野内に設定された複数の基準位置のそれぞれについて作成された複数のデータを記憶しており、注目点の位置に応じて参照するデータが切り替えられる。
(もっと読む)
位置検出機能付き機器
【課題】検出光の出射空間のサイズを可変にすることのできる位置検出機能付き機器を提供することにある。
【解決手段】位置検出機能付き機器1の光学式位置検出装置10Aにおいて、検出用光源部12が検出光L2を出射した際に対象物体Obで反射した検出光を光検出部30で検出して対象物体Obの座標を検出する。第1検出用光源部12A〜第4検出用光源部12Dは、第1発光素子12A1、12B1、12C1、12D1〜第3発光素子12A3、12B3、12C3、12D3を備えている。対象物体Obの検出空間10Rを広く設定する場合には、点灯する発光素子の数を増やして出射空間を広げる一方、対象物体Obの検出空間10Rを狭く設定する場合には、点灯する発光素子の数を減らして出射空間を狭める。
(もっと読む)
位置検出システム、方法、記憶媒体、及びプログラム
【課題】投射光領域の輪郭が不明瞭な場合でも、移動体の正確な位置を検出する。
【解決手段】移動体の位置を検出する位置検出システムであって、天井面を撮影した画像から前記移動体に装着されかつ鉛直制御された光源から該天井面へ投射された投射光の画像領域を抽出する抽出手段と、前記投射光の画像領域の重心位置を算出する算出手段と、前記重心位置を床面の前記移動体の位置へと変換する位置変換手段とにより達成される。
(もっと読む)
位置検出機能付き機器
【課題】測定頻度を高めることに伴って対象物体の位置検出精度を高めることのできる位置検出機能付き機器を提供すること。
【解決手段】位置検出機能付き機器1の光学式位置検出装置10において、検出用光源12が視認面41の側に検出光L2を出射し、対象物体Obで反射した検出光を光検出部30で検出して対象物体Obの座標を検出する。検出空間10Rからみたときに光検出部30の周りで周方向で並ぶ第1検出用光源12A、第2検出用光源12B、第3検出用光源12Cおよび第4検出用光源12Dは、光検出部30からの距離が相違している。また、第1検出用光源12Aと第2検出用光源12Bとを結ぶ線と、第3検出用光源12Cと第4検出用光源12Dとを結ぶ線とが非平行で、第1検出用光源12Aと第4検出用光源12Dとを結ぶ線と、第2検出用光源12Bと第3検出用光源12Cとを結ぶ線とが非平行である。
(もっと読む)
3次元形状測定装置、3次元形状測定付加装置および3次元形状測定方法
【課題】被測定物の視認性や人の作業効率に影響を与えることなく、高精度かつ確実に被測定物の3次元形状を導出する。
【解決手段】3次元形状測定装置110は、被測定物102に投光する投光源150と、被測定物で反射された反射光を受光し投影像を形成する受光素子160と、2値化された制御信号を生成する信号生成部170と、被測定物に照明光を照射する照明装置120を制御信号が第1状態を示す間消灯する照明制御部162と、制御信号が第1状態を示す間に、受光素子に投影像を形成させる投影像形成制御部172と、受光素子で形成された投影像に基づいて被測定物の3次元形状を導出する3次元形状導出部176とを備える。
(もっと読む)
位置検出機能付き機器
【課題】測定頻度を高めることに伴って対象物体の位置検出精度を高めることのできる位置検出機能付き機器を提供すること。
【解決手段】位置検出機能付き機器1の光学式位置検出装置10において、検出用光源12が検出光L2を出射した際に対象物体Obで反射した検出光を光検出部30で検出して対象物体Obの座標を検出する。検出空間10Rからみたときに光検出部30の周りで周方向で並ぶ第1検出用光源12A、第2検出用光源12B、第3検出用光源12Cおよび第4検出用光源12Dは、光検出部30からみて不等の角度間隔に配置されている。また、第1検出用光源12Aと第2検出用光源12Bとを結ぶ線と、第3検出用光源12Cと第4検出用光源12Dとを結ぶ線とが非平行で、第1検出用光源12Aと第4検出用光源12Dとを結ぶ線と、第2検出用光源12Bと第3検出用光源12Cとを結ぶ線とが非平行である。
(もっと読む)
距離測定装置及びプロジェクタ
【課題】 正確な距離測定が可能であって測定可能な距離の範囲が広く、又機構の調整を容易に行える距離測定装置と、該距離測定装置を備えたプロジェクタを提供する。
【解決手段】 プロジェクタは、光源装置と、当該光源装置からの光を表示素子に導光する光源側光学系と、表示素子と、該表示素子から射出された画像をスクリーンに投影する投影側光学系と、距離測定装置1とを備え、光源装置や表示素子を制御するプロジェクタ制御手段を有しているものである。そして、この距離測定装置1は、レーザー光を測距対象に照射するレーザー発光器2と、測距対象からの反射光を集光する受光レンズ4と、この受光レンズ4を透過した測距対象からの反射光を受光する受光素子3と、を有し、レーザー発光器2からの射出レーザー光の光軸位置に受光レンズ4の受光領域を位置させているものである。
(もっと読む)
円筒面の形状計測方法
【課題】レーザ走査干渉を用いて円筒面の形状を簡単に、かつ、短時間で測定することができ、同時に円筒面の表面画像を得ることのできる、円筒面の形状計測方法を提供する。
【解決手段】テレセントリックfθレンズ8の焦点面近傍に近接配置した参照平面9a及び被観察円筒面10aからの反射光を前記テレセントリックfθレンズ8により平行光束に変換し、結像レンズ11によって集光してテレセントリックfθレンズ8の焦点面と共役の位置に設置したピンホール12aを通過させ、ピンホール12aを通過した反射光の光量を受光素子13で計測する。レーザ光源1からのレーザ光を連続点灯又はパルス点灯させるとともに、走査光を被観察円筒面10aの母線に沿って走査させ、かつ、被観察円筒面10aを有する被測定物10をその円筒軸10bを中心に回転させながら計測する。
(もっと読む)
光学式位置検出装置
【課題】検出光の出射空間のサイズを可変にすることのできる光学式位置検出装置を提供
すること。
【解決手段】光学式位置検出装置10Aにおいて、検出用光源部12が検出光L2を出射
した際に対象物体Obで反射した検出光を光検出器30で検出して対象物体Obの座標を
検出する。第1検出用光源部12A〜第4検出用光源部12Dは、第1発光素子12A1
、12B1、12C1、12D1〜第3発光素子12A3、12B3、12C3、12D3を備
えている。対象物体Obの検出空間10Rを広く設定する場合には、点灯する発光素子の
数を増やして出射空間を広げる一方、対象物体Obの検出空間10Rを狭く設定する場合
には、点灯する発光素子の数を減らして出射空間を狭める。
(もっと読む)
3次元形状測定装置
【課題】 規格内の大きさの受光センサを用いても、受光センサを大きくした場合と同じように、3次元形状の測定可能範囲が大きいか、又は分解能を高くする。
【解決手段】 レーザ光照射器から測定対象物(OB)の表面にレーザ光を照射し、測定対象物OBの表面の照射スポット位置にて発生する散乱光の一部である反射光を集光レンズ32で集光するとともに、集光された反射光をダイクロイックミラー30で互いに異なる少なくとも第1方向及び第2方向に分離する。分離された反射光を、複数の受光素子からなる受光センサ14,24でそれぞれ受光する。受光センサ14,24は、レーザ出射器からの距離が異なる測定対象物OBの表面からの反射光をそれぞれ受光するとともに、一部距離を重複させる。受光センサ14,24による受光信号を用いて、3角測量法の原理に基づいてレーザ光照射器から測定対象物OBの表面までの距離を計算する。
(もっと読む)
光学式位置検出装置および位置検出機能付き表示装置
【課題】撮像素子を用いなくても、検出空間全体にわたって対象物体の位置を正確に検出
することのできる光学式位置検出装置、および当該光学式位置検出装置を備えた位置検出
機能付き表示装置を提供すること。
【解決手段】光学式位置検出装置10は、ピーク波長が840nmから1000nmの帯
域の赤外光からなる検出光L2を検出空間10Rに向かって出射する位置検出用光源装置
11を設け、対象物体により反射した検出光L3を光検出器30によって検出する。位置
検出用光源装置11では、位置検出用光源12から出射された検出光L2の光強度分布を
、光強度分布変換用液晶パネル160を備えた光強度分布変換用液晶装置16によって変
換し、出射する。
(もっと読む)
変位センサ
【課題】安定的なフィードバック制御が可能な変位センサを提供する。
【解決手段】制御部は、複数の画素の第2の方向Yに沿った複数の走査線T毎に受光信号を読み取り、該受光信号に基づいて得られる受光波形のピークに基づく光量レベル(ピーク値又は飽和画素の個数)を走査線T毎に検出し、複数設定された光量レベルの所定の範囲毎の走査線Tの個数をカウントし、その個数が最も多い光量レベルの範囲に基づいてフィードバック制御を行う。
(もっと読む)
位置検出機能付き機器
【課題】比較的簡素な光学式入力装置でありながら位置検出精度が高く、かつ、情報の視
認を妨げることのない位置検出付き機器を提供すること。
【解決手段】位置検出機能付き機器1の光学式位置検出装置10において、検出用光源1
2が検出光L2を出射した際に対象物体Obで反射した検出光を光検出器30で検出して
対象物体Obの座標を検出する。検出用光源12は、視認面構成部材40の視認面41側
に検出光L2を出射するが、かかる検出光L2は赤外光である。このため、検出光が視認
されないので、情報の視認を検出光L2が妨げない。
(もっと読む)
干渉型光ファイバーセンサーシステムおよび演算器
【課題】ダイナミックレンジの広い演算器が不要な干渉型光ファイバーセンサーシステムを提供する。
【解決手段】物理量を検知するセンシングファイバー11aおよびリファレンスファイバーを有する干渉計と、前記物理量の測定信号3を含む干渉光32aを、電気信号に変換するO/E変換器33と、前記電気信号から、正弦波成分および余弦波成分を抽出するAM復調器51a、51bと、該正弦波成分および該余弦波成分を用いて逆正接演算を行い、前記測定信号を含む信号を出力する逆正接演算器53と、前記逆正接演算器から出力された信号の所定時間毎の差分を算出し、該差分信号を出力する差分器61と、を備える。
(もっと読む)
光学式位置検出装置
【課題】対象物体が検出用光源を配置した領域の外側にあるのか内側にあるのかを検出す
ることのできる光学式位置検出装置を提供すること。
【解決手段】光学式位置検出装置10において、検出用光源部12が検出光L2を出射し
た際に対象物体Obで反射した検出光を光検出器30で検出して対象物体Obの座標を検
出する。検出空間10Rからみたときに、光検出器30は、複数の検出用光源部12より
内側に位置するとともに、複数の検出用光源部12は各々、外側発光素子12A1〜12
D1と内側発光素子12A2〜12D2とを備えている。従って、外側発光素子12A1〜1
2D1が点灯した際の光検出器30での受光強度と内側発光素子12A2〜12D2が点灯
した際の光検出器30での受光強度との比較結果に基づいて対象物体Obが検出用光源部
12より外側あるいは内側のいずれに位置するかを判定することができる。
(もっと読む)
光学式位置検出装置
【課題】光検出器の感度指向性の影響を受けにくくすることにより、対象物体の位置にか
かわらず光検出器での受光強度を高いレベルとすることのできる光学式位置検出装置を提
供すること。
【解決手段】光学式位置検出装置10において、光検出装置30は、光検出器31を変位
させて光検出器31の受光部32を検出空間10R内の複数領域10R1、10R2、1
0R3に向かせるアクチュエータ35を備えており、光検出器31は、受光部32が検出
空間10R内の複数の領域10R1、10R2、10R3に向いた状態で、対象物体OB
で反射した検出光を検出する。このため、光検出器31が感度指向性を有する場合でも、
光検出器31の高感度角度範囲Θhのみで検出空間10R全体をカバーすることができる
。
(もっと読む)
変位センサ
【課題】測定部位毎の態様が急変しても、安定して適切な測定を行うことができる変位センサを提供する。
【解決手段】フィードバック回数設定部19及び制御部16にて1出力周期において複数回の調整の設定がなされると、制御部16はその最後のフィードバック調整後の測定値信号の出力を行い、受光信号が安定するまでの過渡期における測定値の排除が行われる。
(もっと読む)
光学式センサー装置
【課題】検出光が対象物体で反射した光を受光した結果に基づいて対象物体の傾きを検出
することのできる光学式センサー装置を提供すること。
【解決手段】光学式センサー装置10において、検出用光源12が検出光L2を出射した
際に対象物体Obで反射した検出光を光検出器30で検出して対象物体Obの座標を検出
する。光源駆動部14は、複数の検出用光源12を第1出射強度をもって順次点灯させる
第1モード、および複数の検出用光源12を第1出射強度よりも大の第2出射強度をもっ
て順次点灯させる第2モードを行ない、その間、光検出器30は、対象物体Obで反射し
た検出光L3を受光する。従って、監視部50は、対象物体Obの異なる範囲で反射した
検出光L3の2つの受光結果を用いて対象物体Obの傾きを検出することができる。
(もっと読む)
141 - 160 / 595
[ Back to top ]