
Fターム[2F065NN02]の内容
光学的手段による測長装置 (194,290) | 制御 (2,523) | 光強度の (880) | 光源出力 (595)
Fターム[2F065NN02]に分類される特許
81 - 100 / 595
検出装置
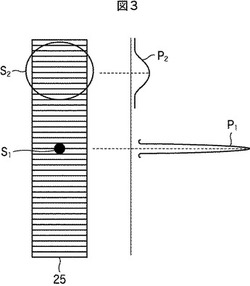
【課題】確実に、かつ、高速に、合焦位置の検出を行う。
【解決手段】ラインセンサ25を構成するラインピクセル上の合焦時の光点像(レーザスポットS1)では、レーザ光の光量が絞られる調整制御が行われ、合焦ピクセルから離れた位置となる非合焦時の光点像(レーザスポットS2)では、レーザ光の光量が増加される調整制御が行われるように、あらかじめ定められたテーブルデータに従ったフィードフォワード制御が行われることで、確実に、かつ、高速に、合焦位置の検出を行うことができる。本発明は、例えば、対象物の断面形状を測定する測定装置に用いられる位置検出装置に適用することができる。
(もっと読む)
3次元形状測定装置

【課題】受光センサにて受光した反射光のスポットが欠けた場合であっても、精度良く測定対象物の3次元形状を測定できる3次元形状測定装置及び3次元形状測定方法を提供する。
【解決手段】受光信号の強度の閾値としてレベルL1を設ける。受光信号の強度が最も大きい受光素子の位置を基準位置P1(n)とする。基準位置P1(n)の両側から、受光信号の強度がレベルL1である受光素子又はレベルL1に最も近い受光素子の位置を1つずつ取得する。前記取得した2つの受光位置の中点と基準位置P1(n)とのずれ量D1が許容値以下であれば、基準位置P1(n)を反射光の結像位置P(n)と決定し、結像位置P(n)を用いて、その測定ポイントの3次元座標を算出する。ずれ量D1が許容値より大きければ、その測定ポイントの3次元座標を算出しない。
(もっと読む)
光学センサ及び画像形成装置
【課題】対象物の相対的な位置情報を短時間で精度良く検出することができる光学センサを提供する。
【解決手段】 面発光レーザアレイを含む光源11、非平行透明部材12、コリメートレンズ13、対物レンズ14、及び処理装置などを備えている。面発光レーザアレイの複数の発光部から射出された複数の光束は、Z軸方向に関して互いに異なる位置に集光される。そして、処理装置は、面発光レーザアレイの複数の発光部に一定の電圧を印加するとともに、発光部毎にセルフミキシング信号をプリンタ制御装置に出力する。プリンタ制御装置は、各発光部のセルフミキシング信号に基づいて、Z軸方向に関する記録紙との距離を求める。
(もっと読む)
三次元形状計測装置、部品移載装置および三次元形状計測方法
【課題】ライン状(線状)の撮像領域を用いて移動する計測対象物の撮像を行う際にも、高輝度な照明光を用いることなく明るい画像を取得することが可能な三次元形状計測装置を提供する。
【解決手段】この表面実装機100は、各々がX1方向に並べられるとともにX1方向と直交するY2方向にライン状に延びるライン状撮像領域63a〜63fを含み、部品120を撮像する二次元イメージセンサ63と、二次元イメージセンサ63に対してX1方向に相対的に移動する部品120に向けて正弦波状の光強度分布を有するパターン光Gを投影する照明部61と、二次元イメージセンサ63が、ライン状撮像領域63a〜63fを用いて部品120の領域P1を順次撮像する場合に、領域P1の画像信号を、投影されたパターン光Gが有する周期Lの2分の1の積分範囲dで積算する制御を行う撮像制御部73とを備える。
(もっと読む)
乗員頭部検知装置
【課題】演算負荷の増大を防止しつつ検知精度を向上させる。
【解決手段】乗員頭部検知装置10は、単眼距離画像センサ11から出力される距離画像を構成する複数の画素毎に3次元空間での法線ベクトルの逆方向に固定長の逆ベクトルを算出し、該逆ベクトルにより指定される3次元空間での位置座標を内部座標とする内部座標設定部52と、3次元空間を構成する複数の単位空間毎に該単位空間内に含まれる内部座標の総数に係るスコア値を算出し、複数の画素毎に対応する内部座標が含まれる単位空間のスコア値を複数の画素毎に対応させて示すスコア画像を生成するスコア画像生成部53とを備え、スコア画像を構成する複数の画像領域のうちからスコア値に基づいて車室内の乗員の頭部領域を抽出する。
(もっと読む)
光学式位置検出装置および位置検出機能付き機器
【課題】対象物体以外の物体で反射した検出光の影響を受けずに対象物体の位置を検出することができる光学式位置検出装置、および位置検出機能付き機器を提供すること。
【解決手段】光学式位置検出装置10においては、複数の検出用光源12を順次点灯させると、第1受光部31は、対象物体Obで反射した検出光L3を受光する。その際、第1受光部31には、対象物体Ob以外の物体Sbで反射した検出光L4が入射する場合があるが、光学式位置検出装置10には、検出対象空間10Rに入射しない補償光L5を出射する補償用光源部81と、検出光L2、L3、L4を受光せずに補償光L5を受光する第2受光部32とが設けられており、位置検出部50は、第1受光部31での受光強度と第2受光部32での受光強度との差に基づいて対象物体Obの位置を検出する。
(もっと読む)
ファウル検出装置
【課題】ファウルポール近傍のファウル領域に飛翔した打球を確実に検出して表示する。
【解決手段】野球場のファウルラインがフェンス24と接する地点に設置されたファウルポール7に隣接したファウル領域に設けた複数の光ビームを投受光するビームセンサ2で打球がファウルポール7の近傍のファウル領域に飛んだことを検出して確認表示装置4に打球がファウルであることを表示させて、ファウルポール7の近傍に飛んだ打球がフェアであるかファウルであるかを正確にかつ容易に確認する。
(もっと読む)
光学式位置検出装置および位置検出機能付き機器
【課題】対象物体が傾いている場合や対象物体のサイズが部分によって相違している場合でも、対象物体の位置を精度よく検出することのできる光学式位置検出装置、および位置検出機能付き機器を提供すること。
【解決手段】光学式位置検出装置10は、検出用光源12から検出光L2を出射し、検出対象空間10Rの対象物体Obで反射した検出光L2の一部を光検出器30で受光して対象物体Obの位置を検出する。また、入射光選択部20は、検出対象空間10R(空間10R1、10R2、10R3)のうち、一部の空間についてはこの一部の空間から光検出器30への反射光L3の入射が許容された選択状態とし、他の空間については他の空間から光検出器30への反射光の入射が阻止された非選択状態とする。また、入射光選択部20は、選択状態とされる空間および非選択状態とされる空間をZ軸方向で切り換える、
(もっと読む)
乗員検知装置
【課題】乗員とチャイルドシートとの存在を精度良く判定する。
【解決手段】乗員検知装置10は、単眼距離画像センサ11から出力される距離画像に基づき、乗員の頭部領域を検知する頭部領域検知部52およびシートの領域を検知するシート領域検知部53と、シートの領域を距離画像から除去して得られるシート領域除去画像に基づき、頭部領域を有する乗員領域の体積を推定し、該体積が所定体積範囲内であるか否かを判定する体積判定部54と、乗員領域の体積が所定体積範囲内であると判定された場合に、頭部領域の断面画像と乗員領域の断面画像とを比較し、乗員の肩部の有無を判定し、乗員の肩部が存在すると判定された場合には乗員領域には大人が存在すると判定し、乗員の肩部が存在しないと判定された場合には乗員領域にはチャイルドシートおよび該チャイルドシートに着座した子供が存在すると判定する乗員判定部56とを備える。
(もっと読む)
形状測定システム及び形状測定方法
【課題】スキャナを用いた形状測定システムにおいて、いわゆる手振れによる測定誤差を低減することをその目的とする。
【解決手段】形状測定システム1は、多関節アームの先端に取り付けられ、測定対象Aに対し手動で移動可能であり、測定対象Aに対しレーザ光を照射しその反射光を、光センサ61の複数の受光ラインで順次検出するスキャナ21と、スキャナ21の手振れ情報を光センサ61の受光ライン毎に取得する加速度センサ42と、各受光ラインのスキャナ21の手振れ情報に基づいて、受光ライン毎に画像の位置情報を補正する手振れ補正部80と、スキャナ21の画像情報と手振れ補正部80で補正された画像の位置情報に基づいて、測定対象Aの画像を生成する画像生成部100と、を有する。
(もっと読む)
検出装置
【課題】合焦精度を向上させる。
【解決手段】高感度のラインセンサ16Bは、レーザ照明部11により照明された対象物2の光点像の光量から得られる高輝度の受光データを取得し、低感度のラインセンサ16Aは、対象物2の光点像の光量から得られる低輝度の受光データを取得し、データ処理部17は、正常時は、高感度のラインセンサ16Bからの高輝度の受光データを選択し、高輝度の受光データを得るときのレーザ光が飽和した場合、低輝度の受光データを選択する。そして、検出部18は、データ処理部17により選択された受光データに基づいて、対象物2の像の合焦状態を検出することで、対象物2の像の合焦状態が確実に検出されるので、合焦精度を向上させることができる。本発明は、例えば、対象物の断面形状を測定する測定装置に用いられる位置検出装置に適用することができる。
(もっと読む)
シート材端部の観察評価装置及び方法
【課題】 高価な位置検出器を取り付けることなく、シート材端部の観察画像が常に最適状態にある観察装置及び方法、並びに、観察画像を用いた評価結果にばらつきが生じることを防ぐことができる観察評価装置及び方法を提供する。
【解決手段】 連続搬送されるシート材端部を第1及び第2の観察手段を用いて観察評価する装置及び方法において、
第1の観察手段は、シート材の幅方向端部を視野に含み、厚み方向にシート材端部との距離が変更可能な第1の観察手段位置変更機構に取り付けられ、
第2の観察手段は、シート材の厚み方向端部を視野に含み、幅方向にシート材端部との距離が変更可能な第2の観察手段位置変更機構に取り付けられており、
第1及び第2の観察手段での観察情報に基づき、シート材の幅及び厚み方向端部の位置を検出し、第1及び第2の観察手段位置変更機構を制御することを特徴とするシート材端部の観察評価装置及び方法である。
(もっと読む)
光学式位置検出装置および位置検出機能付き機器
【課題】少ない数の検出用光源部であっても、広い領域にわたって対象物体の位置を検出することのできる光学式位置検出装置、および位置検出機能付き機器を提供すること。
【解決手段】光学式位置検出装置10は、第1検出用光源部12Aおよび第2検出用光源部12Bから検出光L2を出射し、検出対象空間10Rの対象物体Obで反射した検出光L2の一部を光検出部30で受光して対象物体Obの位置を検出する。第1検出用光源部12Aおよび第2検出用光源部12Bは、検出対象空間10RからX軸方向で離間しており、光検出部30は、検出対象空間10Rから第1検出用光源部12Aおよび第2検出用光源部12BよりY軸方向で離間している。このため、検出光L2が対象物体Obで正反射して光検出部30に入射するような対象物体Obの特異位置を、よりX軸方向の外側にシフトさせることができる。
(もっと読む)
光学式位置検出装置および位置検出機能付き機器
【課題】参照用光源から出射された参照光が検出光出射空間に漏れてしまうことを防止しつつ、光検出器での参照用光源の検出強度を適正なレベルに抑えることができる光学式位置検出装置、および位置検出機能付き機器を提供すること。
【解決手段】光学式位置検出装置10では、対象物体により反射した検出光L3の一部を光検出器30により受光した結果、および検出対象空間10Rを介さずに光検出器30に入射した参照光Lrの強度に基づいて対象物体Obの位置を検出する。光検出器30と、参照光Lrを出射する参照用光源12Rとは、受光ユニット35を構成しており、参照用光源12Rから出射された参照光Lrが検出対象空間10Rに漏れることを回避する。受光ユニット35では、参照用光源12Rから出射された参照光Lrを、強度を低下させた状態で光検出器30に入射させるため、光検出器30での参照光Lrの検出強度のレベルを低く抑えることができる。
(もっと読む)
光学式位置検出装置および位置検出機能付き機器
【課題】湾曲したフレキシブル基板に実装された複数の発光素子から出射された検出光を利用して対象物体の位置を検出する方式を採用するにあたって、発光素子を所定の位置に設けることのできる光学式位置検出装置、および位置検出機能付き機器を提供すること。
【解決手段】光学式位置検出装置の光源部20では、帯状のフレキシブル基板40に複数の発光素子30が実装されており、複数の発光素子30は各々、検出光L2を出射する。フレキシブル基板40は、基板支持部材50の凸曲面55に重ねて配置されているため、フレキシブル基板40が長すぎた場合、フレキシブル基板40の端部を切り欠き511b、521bに差し込むことができる。このため、フレキシブル基板40が浮き上がることがない。
(もっと読む)
光学式位置検出装置および位置検出機能付き機器
【課題】検出対象空間の広さ等に応じて光源部の数が変化しても、同一仕様の制御用ICで対応することのできる光学式位置検出装置、および当該光学式位置検出装置を備えた位置検出機能付き機器を提供すること。
【解決手段】光学式位置検出装置10において、検出光を出射する複数の光源部12、および複数の光源部12を制御する制御用IC70を備えた光源モジュール11が用いられている。従って、光源部12の数を増やす際、制御用IC70の仕様を変えずに、光源モジュール11の数を増やせばよい。また、第1光源モジュール11Aに設けられた制御用IC70は、他の第2光源モジュール11B、第3光源モジュール11C、第4光源モジュール11Dに設けられた制御用IC70に対する上位の制御用ICとしてこれらの制御用IC70を制御する。
(もっと読む)
透光性管状物体の厚さ測定装置
【課題】 透光性管状物体の厚さを全域にわたって短時間で精度よく測定する。
【解決手段】 測定用レーザ光をガルバノミラー35で反射させてガラス管Gに照射し、ガラス管Gの外周面で反射する反射光及び内周面で反射する反射光をラインセンサ39で受光し、反射光の受光位置からガラス管Gの厚さを検出する。サーボ用レーザ光源40からのサーボ用レーザ光をガルバノミラー35で反射させて、ガラス管Gにおける測定用レーザ光の照射位置又はその近傍位置にZ軸方向から照射する。フォトディテクタ48でガラス管Gからのサーボ用レーザ光の反射光を受光し、Y軸方向エラー信号生成回路119、Y軸方向サーボ回路120及びY軸方向ドライブ回路121が、モータ36を駆動制御することにより、測定用レーザ光の光軸がガラス管Gの中心軸と交差するようにガルバノミラー35のX軸線周りの回転をサーボ制御する。
(もっと読む)
位置変動監視装置およびこれを含む位置変動監視システム
【課題】監視対象領域の位置変動の測定精度を高める。
【解決手段】位置変動監視システム1は、予め決められた監視対象領域に設置された複数の監視指標2と、複数の監視指標2が撮像された撮像画像を用いて監視対象領域の位置変動を検出する位置変動監視装置3とを備える。位置変動監視装置3は、複数の監視指標2を予め設定された時間間隔で撮像する撮像部51と、撮像部51により時系列で得られる撮像画像を用いて複数の監視指標2の位置変位を求める画像解析部61と、複数の監視指標2の位置変位があった場合に警告を報知するように報知装置4を制御する報知制御部63とを備える。
(もっと読む)
測定装置及び測定方法
【課題】 パターン投影法により、測定対象物の画像特徴と距離画像とを同時に取得することを目的とする。
【解決手段】 測定装置に、測定対象に投影するパターン光特性の照明光を設定するパターン光特性設定部112と、前記照明光を前記測定対象に照射したときの反射光を測定する反射光測定部120と、測定された前記反射光から測定対象の物理特性に応じた画像特徴を抽出する画像特徴抽出部130と、前記画像特徴の局所領域ごとの分布特性を算出する特徴分布算出部180と、算出された前記局所領域ごとの分布特性に応じて、距離計測用のパターン光特性と、画像特徴抽出用のパターン光特性とを含む前記照明光のパターン光特性を制御するパターン光制御部170とを備える。
(もっと読む)
球体の位置測定装置及び方法
【課題】円軌道上を公転する球体の位置を好適に測定することができる球体の位置測定装置を提供する。
【解決手段】球体の位置測定装置は、円軌道の中心線O上に中心を有するリング照明18と、前記中心線O上に配置されたレンズ20を有し、前記中心線Oを含む範囲で前記球体13を撮像する撮像部17と、前記撮像部17によって撮像された画像中における、前記球体13の表面で反射した前記リング照明18の反射光を認識し、この反射光の領域の重心位置を求める画像処理部22と、を備える。
(もっと読む)
81 - 100 / 595
[ Back to top ]