
Fターム[2F065PP13]の内容
光学的手段による測長装置 (194,290) | 装置全体の構造 (6,881) | 対象物保持、載物手段 (3,708) | 移動テーブル (2,675) | 回転のみ (699)
Fターム[2F065PP13]に分類される特許
1 - 20 / 699
コイルばね計測装置
検査装置
表面検査装置、表面検査方法、および露光システム
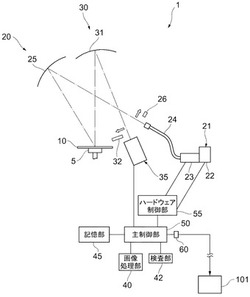
【課題】露光時の走査方向の違いによって生じるスキャン精度の差異を求めることが可能
な表面検査装置を提供する。
【解決手段】露光によって作製されたパターンを有するウェハを照明光で照明する照明系
20と、パターンで反射した照明光を検出する受光系30および撮像装置35と、撮像装
置35により撮像されたウェハの回折画像からパターンの線幅を求め、走査方向によるパ
ターンの線幅の差を求める検査部42とを備えている。
(もっと読む)
マシンビジョンシステムのパートプログラム編集環境内で編集初期化ブロックを利用するシステム及び方法

【課題】マシンビジョンシステムのパートプログラム編集環境内で編集初期化ブロックを利用するシステム及び方法を提供する。
【解決手段】パートプログラムの編集初期化ブロックを定義及び利用する方法が提供される。パートプログラムは、一部を測定するための複数のステップを備え、編集インタフェースに表示される。編集インタフェースに、編集初期化ブロックに含めるステップを選択する選択肢が提供される。パートプログラムが保存された後に、編集のためにパートプログラムが呼び出されると、追加のステップがパートプログラムに追加される前に編集初期化ブロックが実行され得る。編集初期化ブロックにない初期パートプログラムステップによって取得されたデータの少なくともいくつかは、編集初期化ブロックを実行して決定されたデータに関連する推定データに基づいてもよい(例えば、基づいて変更されてもよい)。
(もっと読む)
回転機ギャップ計測装置
【課題】画像処理により直接的にギャップを計測し、また、異常を検出した場合の保守作業員の目視による確認作業の手間を省くことを可能とする。
【解決手段】カメラ1で、照明器具2により照らされた回転機のギャップ14を撮影し、撮影した画像データは画像伝送器4によって電気信号から光信号に変換され、光ケーブル8を通り情報装置盤6内の画像伝送器5に送信される。送信された光信号は、画像伝送器5において電気信号に再び変換され、画像伝送器5から画像解析装置7に送信される。画像解析装置7では画像伝送器5から送信されてきた画像データを基にギャップ14の計測を行い、計測した情報はネットワーク13a経由で遠隔地にある監視装置13bへ送信される。これによって、監視装置13bにより確認することができる。
(もっと読む)
厚み測定方法、厚み測定装置、および厚み測定システム
【課題】立体構造を有する物体の厚み分布を、短時間に、かつ容易に測定する。
【解決手段】厚み測定方法は、測定対象物6に光を照射する光照射工程(S1)と、測定対象物6に照射された光が、測定対象物6を透過しているときに、測定対象物6への光の照射方向とは異なる所定の方向から、測定対象物6を撮像する撮像工程(S2)と、その撮像画像に基づいて、測定対象物6の厚み分布を測定する測定工程(S3)と、を含む。
(もっと読む)
樹脂製保持器の欠陥検査装置及び欠陥検査方法
【課題】樹脂製保持器に対して高精度に欠陥等を検出することができる樹脂製保持器の欠陥検査装置及び欠陥検査方法を提供する。
【解決手段】転動体7が保持されるポケット8を周方向に沿って複数個有する樹脂製保持器1の欠陥を検査する。樹脂製保持器1をその軸心廻りに回転駆動させつつ、樹脂製保持器1のアキシャル方向及び/又はラジアル方向の変位を検出し、この変位量に基づいて良品判定を行う。
(もっと読む)
キャリブレーション方法および基板検査装置
【課題】撮像装置とキャリブレーションマークとの位置関係に係わらず、撮像装置をキャリブレーションするに十分な、キャリブレーションマークの撮像画像を取得する。
【解決手段】単一のキャリブレーションマークを複数回撮像することによって、複数の基準マークが配置されたキャリブレーションを撮像したときと同様の画像マークを取得し、この画像マークに基づいて撮像装置について中心位置、取り付け角度、分解能等のキャリブレーションを行う。単一のキャリブレーションマークを異なる撮像位置で複数回撮像して画像マークを取得する撮像工程と、複数回の撮像で取得したキャリブレーションマークの各画像マークを用いて、複数個の画像マークを有した撮像画像を形成する撮像画像形成工程と、撮像画像の画像マークの位置と撮像画像上の基準位置とに基づいて、撮像装置のキャリブレーション情報を算出するキャリブレーション情報算出工程とを備える。
(もっと読む)
光ファイバの曲率の測定方法
【課題】光ファイバの長手方向の曲率変動を容易かつ高精度に測定する方法を提供する。
【解決手段】光ファイバ1の一端を回転可能に把持し、該光ファイバ1の軸方向側面上の所定長離れた2点に対して、該軸方向にほぼ垂直かつ互いに平行な2本のビーム光線6を照射し、前記側面上で散乱した2つの散乱反射光7のそれぞれの代表位置を、該光ファイバ軸と平行な軸上の座標位置として計測し、得られた2つの座標位置の差分を求め、次いで、該光ファイバ1を所定角度回転させ、同様の操作を行って2つの座標位置の差分を求める操作を複数回繰返し、得られたそれぞれの角度での差分から正の値を取る振幅SAの代表値を求め、さらに振幅SAから曲率を求め、これを第1の光ファイバ長手位置の第1の曲率とし、さらに、光ファイバ1の長手方向にビーム光線を照射する位置を変え、同様の処理を複数回繰り返して前記第1から第mまでの曲率を求める。
(もっと読む)
タイヤ厚み測定装置
【課題】内圧を負荷した状態でタイヤの厚みを計測可能なタイヤ厚み測定装置を提供する。
【解決手段】上側ハーフリム84でタイヤ30の一方のビード部を支持し、下側ハーフリム26で他方のビード部を支持し、タイヤ内を密閉して内圧をかける。内側レーザー変位計66から外側レーザー変位計122までの距離からタイヤ内空部に配置した内側レーザー変位計66で計測したタイヤ内面までの距離とタイヤ外側に配置した外側レーザー変位計122で計測したタイヤ外面までの距離とを引き算する。これにより、内圧を負荷した状態でタイヤの厚みを計測することが出来る。
(もっと読む)
露光装置、及びデバイス製造方法
【課題】移動体の位置情報を精度良く計測できる位置計測装置を提供する。
【解決手段】位置計測装置は、移動面内を移動する移動体の位置情報を計測する。位置計測装置は、移動体の第1面に配置された移動格子に光を照射する光源と、光源との位置関係が固定で、移動格子で回折された光が入射する第2面を有し、入射した光を回折又は反射して移動格子に戻す固定光学部材と、移動格子を再度介して干渉された光を検出する検出装置と、を備え、第1面と第2面とはほぼ平行である。
(もっと読む)
位置検出装置、描画装置、および、位置検出方法
【課題】基板の面内領域から取得できる情報を用いて、基板の位置を迅速かつ確実に検出できる技術を提供する。
【解決手段】位置検出装置は、基板9を載置するステージ11と、ステージ11に載置された基板9の面内領域を撮像する撮像部と、撮像部が取得した撮像データに基づいて基板9の位置を特定する位置特定部と、を備える。位置特定部は、撮像データを解析して、基板の表面に形成されたスクライブラインのうち最外周に配置されている最外周スクライブライン910を検出し、最外周スクライブライン910の検出位置に基づいて、レイアウト領域93の中央に配置されている中央チップ領域920の位置を特定する。そして、中央チップ領域920の位置に基づいて、基板中心90の位置を特定する。
(もっと読む)
露光装置及びデバイス製造方法
【課題】 遮光位置のずれを低減する技術の提供。
【解決手段】 原版を光で照明する照明系、前記原版のパターンの像を基板に投影する投影系を有する光学系を備える露光装置で、前記光学系の光路上の前記投影系の物体面と共役な面かその近傍に配置され、前記像が前記基板上に投影される領域の外縁の一部を円弧状に規定する円弧状部を有する遮光板と、前記光学系の光路に沿った回転軸まわりに前記遮光板を回転駆動する回転駆動部と、前記回転軸と交わる方向に前記遮光板をシフトするシフト駆動部と、前記回転駆動部により前記遮光板を回転駆動させ、前記光学系により前記像を前記基板に投影する際の基準となる基準軸と前記回転軸との相対位置の情報を取得する取得部と、前記基板の周辺部に対して前記像を投影する場合、取得した前記相対位置に関する情報に基づき、前記遮光板が所定の位置になるように前記回転駆動部と前記シフト駆動部を制御する制御部を有する。
(もっと読む)
プロキシミティ露光装置、プロキシミティ露光装置の基板位置決め方法、及び表示用パネル基板の製造方法
【課題】安価な構成で、チャックのθ方向の傾きを精度良く検出して、基板のθ方向の位置決めを精度良く行う。
【解決手段】第1のステージに搭載されY方向(又はX方向)へ移動する第2のステージに第2の反射手段(35)を取り付け、第2の反射手段(35)のθ方向の位置ずれを検出する。チャック(10a,10b)に複数の光学式変位計(41)を設け、複数の光学式変位計(41)により、第2のステージに取り付けた第2の反射手段(35)までの距離を複数箇所で測定する。第2の反射手段のθ方向の位置ずれの検出結果に基づき、複数の光学式変位計(41)の測定結果から、チャック(10a,10b)のθ方向の傾きを検出し、検出結果に基づき、第3のステージによりチャック(10a,10b)をθ方向へ回転して、基板(1)のθ方向の位置決めを行う。
(もっと読む)
形状測定方法及び形状測定装置
【課題】被検物の表面形状を短時間で測定可能な形状測定方法を提供する。
【解決手段】形状測定方法は、n=1〜N(Nは3以上の整数)とし、参照光の光軸上において異なるN個の位置を第1位置〜第N位置と称するとき、参照面を第n位置に固定し、物体光を被検物の光軸と所定の角度をなす方向から照射して、被検物をその光軸を中心に回転させながら、干渉縞を、被検物上で重複領域を有して隣接し合う複数の領域ごとに取得される複数の第n干渉縞として取得する第n工程を備え、第1工程から第N工程を行う干渉縞画像取得工程S11の後に、複数の領域のそれぞれに対応する干渉縞を用いて位相解析を行い、部分表面形状データを取得する位相解析工程S12と、部分表面形状データを重複領域でつなぎ合わせて被検物の輪帯状領域又は全体の表面形状データを取得する統合工程S13と、を備える。
(もっと読む)
面法線計測装置、面法線計測システム及び面法線計測プログラム
【課題】物体表面の反射特性に鏡面反射成分を含むことを必要とせず、物体表面までの距離の計測も必要とせずに面法線を計測する。
【解決手段】面法線計測システム1は、ガイドレールRx,Ryに沿って、互いに直行する平面内を移動して物体OBJに対する照明方向を変化させる照明装置30と、物体OBJを撮影する撮影装置40と、撮影装置40によって撮影された画像に基づいて物体OBJの表面の面法線を計測する面法線計測装置10とを備える。面法線計測装置10は、物体OBJの画像を2値化し、画素ごとに、照明方向と明暗とが対応付けられた陰影ベクトルを作成し、予め形状が既知の参照物体について作成した参照陰影ベクトルと面法線とが対応付けられたデータベースを参照して、物体OBJの陰影ベクトルと最も類似する参照陰影ベクトルに対応付けられた面法線を、その画素における面法線と推定する。
(もっと読む)
転写方法および転写装置
【課題】原板が有する凹凸パターンを容易にかつ高い位置精度で基板上の転写液層にインプリントすることのできる技術を提供する。
【解決手段】原板Mの凹凸パターンP面が基板S上に塗布された転写液層UVRに接触した状態で、原板Mおよび基板Sのそれぞれに形成されたアライメントマークALを、1つの認識手段により、両アライメントマークALが重なる方向から同時に撮像して得られた1つの画像から両アライメントマークALの位置を別々に認識処理することで原板Mと基板Sとのアライメントを行う。そのため、撮像された原板Mおよび基板Sのアライメントマーク画像に相対的な位置誤差が生じるおそれがなく、振動や異なる走査タイミングに起因する位置誤差が生じることを防止できる。
(もっと読む)
円形状測定方法および装置
【課題】高価な専用装置を用いることなく、平面上の円形パターンをマルチステップ法により高精度に測定できる円形状測定方法および装置を提供する。
【解決手段】円形パターンを有する被測定物Wを載置するテーブル10、テーブルの回転機構20、画像プローブ30、画像プローブを移動させる移動機構40、制御装置50を有する円形状測定装置を準備する。画像プローブを円形パターンの円周に沿って移動させながら、円形パターンの円周を360°/mピッチで測定する工程と、円形パターンの中心を基準に360°/mだけテーブルを回転させて円形パターンの円周上の同一点を測定する測定動作を、360°/mずつテーブルを回転させながら合計m回行ってm個の測定データを取得する工程と、このm個の測定データから円形パターンの形状成分を求める工程を備える。
(もっと読む)
転写方法および転写装置
【課題】原板が有する凹凸パターンを容易にかつ高い位置精度で基板上の転写液層にインプリントすることのできる技術を提供する。
【解決手段】原板Mの凹凸パターンP面が基板S上に塗布された転写液層に接触した状態で、原板Mおよび基板のそれぞれに形成されたアライメントマークを、1つの認識手段3により、両アライメントマークが重なる方向から、一方のアライメントマークを撮像した後、他方のアライメントマークを撮像し、得られた両アライメントマークの画像にそれぞれ位置誤差補正処理を行う。そのため、補正後の両アライメントマーク画像を用いて高精度なアライメントを行うことが可能になる。
(もっと読む)
ワークテーブルのピッチエラーの測定方法
【課題】多数の板材を連続的に加工する加工機に好適な回転テーブルの回転角の誤差(ピッチエラー)を測定する方法に関し、ワークの連続加工中においても自動測定できるようにする。
【解決手段】ワークと略同形で、表面に所定角度毎に引いた放射状の計測線と、計測線の放射中心を検出させるマークを表示した測定用基板を用いる。加工機に設けられている搬入誤差検出手段により、テーブル上に搬入された測定用基板の中心の位置偏倚及び角度偏倚を検出し、次にテーブルを所定角度ずつ回動したときのカメラの画像上での各計測線の位置を検出し、先に検出した基板中心の偏差で補正した計測線の方向と、その本来の方向との差から、テーブルのピッチエラーを測定する。
(もっと読む)
1 - 20 / 699
[ Back to top ]