
Fターム[2F065PP22]の内容
光学的手段による測長装置 (194,290) | 装置全体の構造 (6,881) | 測定器の形態 (1,547) | 投光、受光一体型 (644)
Fターム[2F065PP22]に分類される特許
201 - 220 / 644
センサ固定具
【課題】ロボット等に使用される複数個のセンサからなるセンサ装置において、複数個のセンサで形成される指向領域がつながるようにセンサを配置すること可能とするセンサ固定具を提供することを課題とする。
【解決手段】本発明のセンサ固定具は、複数のセンサを固定可能なセンサ固定具であって、複数のセンサをその上下から挟み固定する為の挟持部材と、センサと挟持部材とを固定する為の連結部材とを備え、挟持部材は挟持部を有し、該挟持部材の挟持部が、センサの被挟持部と対応な形状となっていることを特徴とする。
(もっと読む)
正確な寸法検査用の自動焦点ビデオツールおよび方法

【課題】寸法検査用の自動焦点ビデオツールおよび方法を提供する。
【解決手段】最良自動焦点Z高さの精度を確実に提供するために、反復する自動焦点動作間に最適化照明を提供する。この方法には、初期光制御パラメータを用いて取得された初期自動焦点画像からの初期焦点曲線データに基づいた、量的な初期焦点Z高さ決定が含まれる。カメラが、よく合焦された画像が提供されるように、その初期焦点Z高さで設定される。最適化された光制御パラメータが、Z高さにおいてそれぞれの光制御パラメータを用いて取得された少なくとも1つのそれぞれの画像に基づいて決定され、改良された光制御パラメータを用いて取得された画像が、Z高さにおけるコントラスト関連用のほぼ最適な値を提供するようにする。改良された自動焦点画像が、改良された光制御パラメータを用いて取得され、改良された正確なZ高さが、結果としての焦点曲線に基づいて量的に決定される。
(もっと読む)
ロボット装置
【課題】計測前までの組み立て作業を無駄にせず組み立てを継続することができるようにしたロボット装置を提供する。
【解決手段】ロボット101と、ロボット101に取り付けられワークを把持するエンドエフェクタ106,107と、ワークの形状計測センサ108と、入力装置を有しロボットの動作を制御する制御装置102と、を有し、制御装置102は、あらかじめ決められた範囲を計測範囲として、ワークを形状計測センサにより計測させ、計測範囲にワークの全体像が入っていない場合には、計測範囲を変えて再計測し、ワークの位置姿勢を決定し、ワークの位置姿勢へエンドエフェクタを移動させてワークを把持し、再計測は、入力装置から入力された計測データに基づいて、計測範囲を変えて再計測を実行する。
(もっと読む)
空調装置
【課題】ダンパーの開口率を安価な設備で測定する空調装置。
【解決手段】吹き出しグリル11の風上側にダンパー12を備えた吹き出し口装置1と、吹き出しグリル11の風上側に設けられた反射鏡15と、ダンパー12の風上側に配置された光学測定ユニット2と、光学測定ユニット2に設けられ、ダンパーの開口12e1の最大開口幅の1/2以上の幅を有する平行光線4を、反射鏡15に垂直に投射する投光器27と、光学測定ユニット2に設けられ、平行光線4が開口12e1を通過して反射鏡15により反射された反射光4aの強度を測定する光検知器25と、平行光線4が吹き出し口装置1の開口121e1を通過する位置に光学測定ユニット2を移動する移動手段5とを有し、反射光4aの強度に基づきダンパー12の開口率を算出する。
(もっと読む)
二面の平行度を測定する方法及びそれに用いる反射部材
【課題】向かい合う二面の平行度あるいは角度を秒オーダの精度で安価、かつ簡易に測定できる二面の平行度を測定する方法とそれに用いる反射部材を提供する。
【解決手段】反射部材としてのビームスプリッタ71の第2面9を上部ミラー5に向け、第3面11を下部ミラー6に向けて配置し、第1面8に入射光ビーム24を入射し、該第1面8からの第1反射ビーム25と、該上部ミラー5で反射し該第1面8を透過して戻ってくる第2反射ビーム26との乖離度を測定する。次に、該第1面8を該下部ミラー6に接して配置し、該第2面9に垂直な方向から該入射光ビーム24を入射し、該第2面9から反射される第3反射ビームと、該入射光ビーム24が該第2面9を透過し、さらに該下部ミラー6で反射し該第2面9を透過して戻ってくる第4反射ビームとの乖離度を測定する。該二つの乖離度から、該上部ミラー5と該下部ミラー6との平行性を計算する。
(もっと読む)
鋳型の平面度測定方法
【課題】 鋳型の平面度を精度良く測定することが可能で、特に凹凸のある鋳型の平面度を高精度に測定する方法を得る。
【解決手段】
鋳型の上方に配設したレーザ測長器から、レーザを鋳型の平面に反射させてレーザ測長器と鋳型表面の距離を測定する鋳型平面度の測定方法であって、凹凸のある鋳型の平面度を測定する場合には、鋳型の凹部の底面に、前記レーザ測長器へのレーザの反射光の検知が可能な高さのレーザ反射部材を載置して、前記レーザ測長器からのレーザを前記レーザ反射部材に照射させてレーザ測長器と反射部材の距離を測定して鋳型の平面度を測定する。
(もっと読む)
トンネルデータ処理システムおよびトンネルデータ処理方法
【課題】 GPSが利用できないトンネル内において、距離メータなどの機械的計測により得た入力データに対してGPSや距離メータ等に起因する誤差を正確に補正する。
【解決手段】 走行する車両に搭載された距離メータやジャイロ装置などの位置検知手段210により測定した原座標系の位置データと、車両に搭載された壁面検知手段120により位置データと同期させた原座標系のトンネル内面点群データをデータ入力部120を介して入力する。入口被検知板310に関するGPSでの計測データと既知の位置データの差分からGPSの誤差を補正し、出口被検知板320に関する距離メータの計測データと既知の位置データの差分からトンネル内で距離メータの誤差により蓄積したトンネル内計測誤差の総計を算出し、キロポスト上の任意の点に対してはトンネル内計測誤差を按分して補正する。
(もっと読む)
表面粗さ測定装置及び表面粗さ測定方法
【課題】坏被測定物の製造ライン中に組み込んで使用することが可能である表面粗さ測定装置を提供する。
【解決手段】被測定物10を載置する載置板5と、載置板5に被測定物10を載置したときの被測定物10の中心軸を中心にして被測定物10の周囲を回転する回転運動、及び被測定物10の中心軸方向に移動する直線運動の両方の動きをすることができるとともに、回転運動と直線運動とを合わせた動きをすることができる、被測定物10の表面粗さを測定するレーザー変位計4とを備え、レーザー変位計4で被測定物10の表面粗さを測定するときに、レーザー変位計4のスキャンスピードV(m/秒)と、レーザー変位計のサンプリング間隔X(秒)との関係が、下記式(1)を満たす関係となる表面粗さ測定装置。
V×X≦4×10−6(m)・・・(1)
(もっと読む)
レール変位量測定におけるレール検出方法およびレール変位量測定装置
【課題】
レール近傍にあって頭面がレールに比べて比較的幅のある平面形状の物体をレールと誤検出することを防止することができるレール変位量測定装置におけるレール検出方法を提供することにある。
【解決手段】
この発明は、測定三角形が形成されたときのこの測定三角形において測定されるレールの位置とこの測定三角形において第1の距離検出器あるいは第2の距離検出器のいずれかにより測定されるレールの位置との位置誤差を算出して、この位置誤差が所定値の範囲にあるときに測定対象をレールとして検出する。
(もっと読む)
ウェーハ貼り合わせ装置及び貼り合わせウェーハの製造方法
【課題】廉価で処理効率の高い、貼り合わせ検査機能を有する自動ウェーハ貼り合わせ装置及び方法を提供する。
【解決手段】本発明にかかるウェーハ貼り合わせ装置は、2枚の貼り合わせ用のウェーハの位置合わせを行うアライナーと、該2枚のウェーハを貼り合わせる、貼り合わせ機構とを備えたウェーハ貼り合わせ装置において、
前記アライナーに、貼り合わせ後のウェーハ相互間の位置ずれを計測する機構を併設したことを特徴としてなる。
(もっと読む)
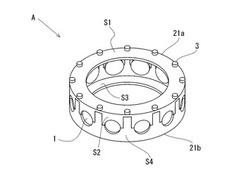
移動環境認識装置及び方法
【課題】移動体の移動対象を簡易に測定する。
【解決手段】円錐検出光DETと測定対象の表面S2との交点TRからの反射光に基づいてセンサ原点Oから測定対象S2までの距離を測定し、当該測定結果から得た交円TRの特徴量によって測定対象表面S2の形状を求めるようにしたことにより、円錐検出光DETの立体的な構成を利用して測定対象S2の形状を簡便かつ確実に測定することができる。
(もっと読む)
光反射型センサおよびマーク検出器
【課題】 光反射型センサの検出性能を向上させる。
【解決手段】 光透過性の受光ガイド部6と、該受光ガイド部6の基端部に設けられ、前記受光ガイド部6に入射された検出対象からの反射光を受光する受光部3と、遮光部材5を介在して前記受光ガイド部6の周部を囲むように配設された光透過性の筒状発光ガイド部4と、該発光ガイド部4の基端部に設けられ、前記発光ガイド部4を通して前記検出対象に発光光を照射する発光部2とを備える。前記発光ガイド部4の内側の先端角部が面取りされている。
(もっと読む)
ひずみ計測方法、ひずみ計測装置およびプログラム
【課題】測定対象5が受ける光の照度や照射方向の変化の影響を受けない、安定した計測ができる、ひずみ計測装置を提供する。
【解決手段】コンピュータ4は、測定対象5の所定領域6を表面高さ計測器2で計測して得られた当初表面高さ分布から、所定領域6の点A,Bをそれぞれ包含する微小領域a,bの表面高さ分布を抽出する微小領域抽出手段、所定領域6の、経時後表面高さ分布上の、前記微小領域a,bに最も近似する微小領域a’,b’内にあって、前記微小領域a,bにおける前記点A,Bに対応する点A’,B’の座標を算出する座標算出手段、及び測定対象5の線分AB方向のひずみを算出するひずみ算出手段として機能する。
(もっと読む)
溶接用レーザ・視覚複合センサおよび溶接制御方法
【課題】センサヘッドも計測システムも一つだけでよい溶接用レーザ・視覚複合センサおよび溶接制御方法を提供する。
【解決手段】開先上に投光したレーザ光(レーザスリット光25)の開先断面像と、アーク直下の溶融池及び電極の画像を得るための溶接用レーザ・視覚複合センサであって、トーチホルダー20上で、溶接トーチ22を中心として、トーチ移動方向の前方及び後方の一方にレーザ投光器24を、他方に撮影カメラ26を配設し、レーザセンサとして使用するときは、前記レーザ投光器24を開先の真上から投光できる姿勢として、開先断面像を前記撮影カメラ26で撮像し、視覚センサとして使用するときは、前記溶接トーチ22を被溶接物10に対して溶接に必要な姿勢として、アーク直下の溶融池及び電極の画像を前記撮影カメラ26で直接撮影する。
(もっと読む)
計測装置、露光装置およびデバイス製造方法
【課題】エンコーダシステムを用いたステージを位置決めする場合、スケール間に存在する幾何学的誤差に起因する計測誤差を低減する。
【解決手段】可動体に配置された複数のセンサと、構造体に取り付けられた複数のスケールとを有し、前記可動体の変位を検出することによって前記可動体の位置を計測する計測装置であって、前記複数のスケールは、第1方向における前記可動体の変位を検出するための2つの第1スケールと、前記第1方向とは異なる第2方向における前記可動体の変位を検出するための2つの第2スケールとを含み、2つのセンサによる検出値とが等しくなるように前記可動体を前記第1位置から前記第2位置に移動させたときに前記2つの第1スケールに対向している2つのセンサによってそれぞれ検出される変位の間の差に基づいて、前記2つの第1スケールの間に存在する幾何学的誤差に起因する計測誤差を低減する制御部とを備える。
(もっと読む)
スケール体、位置検出装置、ステージ装置、及び露光装置
【課題】スケール用のパターンが形成されたパターン形成面の法線方向の位置情報を高精度に計測する。
【解決手段】スケール体28eは、Yスケール39Y2が形成されたパターン板4eと、パターン板4eに設けられ、Yスケール39Y2を覆うカバーガラス5と、カバーガラス5の表面に形成され、互いに異なる波長域の第1の光及び第2の光に対して波長選択性を有する波長選択膜7と、を備え、波長選択膜7を介してカバーガラス5を透過する第1の光の透過率は、カバーガラス5のみを透過する第1の光の透過率より低く、波長選択膜7を介してカバーガラス5を透過する第2の光の透過率は、波長選択膜7で反射する第2の光の反射率より高い。
(もっと読む)
エンジンマウントの変位量計測方法
【課題】高速な振動現象の下にあっても、エンジンマウントのマウント軸として配設されるボルトの中心の3軸並進量、及び、該ボルトの2軸回転量を高精度に算出することができる、エンジンマウントの変位量計測方法を提供する。
【解決手段】本発明に係るエンジンマウントの変位量計測方法は、球体変位計側工程の前に、照射方向と直交する平面上における初期座標が既知である球体13を、照射方向と直交する方向へ、初期座標の位置から既知の移動量dx(dy)だけ移動させ、第1レーザー変位計31a〜第3レーザー変位計31cによる計測点におけるそれぞれの照射方向変位量δS1x〜δS3x(δS1y〜δS3y)を計測し、照射方向変位量δS1x〜δS3x(δS1y〜δS3y)の計測結果から、第1レーザー変位計31a〜第3レーザー変位計31cの位置を算出する、位置算出工程を備える。
(もっと読む)
車両操縦用画像表示装置および方法
【課題】夜間または濃霧などの視界の悪い状況下で、車両前方の路面領域を画像表示することができ、これにより舗装路、未舗装路を区別することなく移動体を操縦することができる車両操縦用画像表示装置および方法を提供する。
【解決手段】車両1に搭載された赤外線カメラ10により車両前方の特定範囲の赤外線画像2を撮影し、車両に搭載された3次元形状測定装置20により前記特定範囲の3次元形状3を計測し、演算処理装置30により3次元形状から車両が通りやすい路面領域4を検出し、赤外線画像2上において路面領域が滑らかに見えるように画像処理した補正赤外線画像5を形成し、表示装置40により補正赤外線画像5を表示する。
(もっと読む)
膜厚測定装置および膜厚測定方法
【課題】オンライン測定の高精度化を図ることができる膜厚測定装置および膜厚測定方法を提供すること。
【解決手段】膜厚測定装置100は,ウエブ20の厚さをオンライン測定するものである。膜厚測定を行う際には,あらかじめ空気巻き込みの影響が少ない状態である低速搬送中に膜厚を測定し,その測定値をマスタ値とする(S02)。そして,生産目標の搬送速度に達した後,高速搬送での計測をするにあたって,オンライン測定での膜厚の計測値とそのマスタ値との差,すなわち変化量を求める(S05)。そして,変化量の計算後,高速搬送中に得た膜厚の計測結果を,その変化量を用いて補正する(S06)。
(もっと読む)
分岐器検査装置
【課題】簡易な構成で一律の安定した精度で測定することができる操作性に優れた分岐器検査装置を提供する。
【解決手段】軌道上を走行可能な台車21と、台車21の走行距離を測定する距離センサ25と、測定対象物の形状を測定するレーザ式変位センサ29と、レーザ式変位センサ29を測定対象側レール11の軌間測定点Pの鉛直線上に常に位置させるスライドガイド27と、測定制御装置40とを有する。測定制御装置40は各測定位置情報、測定情報を記憶する基本データ記憶部、測定データ記憶部、入力部、表示部及び制御部を備える。制御部は台車21の走行距離が測定位置情報に一致した時に測定情報、走行距離を表示部に表示させ、入力部からの入力によりレーザ式変位センサ29を作動させて測定を行わせ、測定データを表示部に表示させると共に測定データ記憶部に格納する。
(もっと読む)
201 - 220 / 644
[ Back to top ]