
Fターム[2F065PP22]の内容
光学的手段による測長装置 (194,290) | 装置全体の構造 (6,881) | 測定器の形態 (1,547) | 投光、受光一体型 (644)
Fターム[2F065PP22]に分類される特許
121 - 140 / 644
形状測定装置
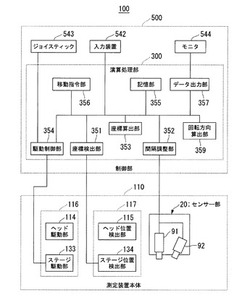
【課題】光学式のセンサー部によって測定する、被検物の形状測定の測定精度を向上させる。
【解決手段】被検物にライン光を照射する光照射部(91)およびライン光の照射方向とは異なる方向から被検物に照射されたライン光を検出する検出部(92)を有するセンサー部(20)と、互いに直交する座標系の座標軸方向それぞれに、センサー部(20)を移動させる移動部と、移動部に対してセンサー部(20)を回転可能に支持する回転機構と、座標系の基準位置を示す球を検出することにより、移動部に対するセンサー部(20)の回転方向を算出する回転方向算出部(359)と、を備える。
(もっと読む)
変位センサシステムに適用する拡張ユニット

【課題】センサシステムを構成するアンプユニットから時系列的に得られる計測データに対して所望の解析処理を適用し、その解析結果に対応する出力を生成することが可能なセンサシステムに適用される拡張ユニットを提供すること。
【解決手段】アンプユニットに連装される拡張ユニットには、計測データ蓄積メモリと、伝送ラインを介して到来する計測データを取得して前記メモリに蓄積する計測データ取得手段と、蓄積された一連の計測データを所定のアルゴリズムに従って解析するデータ解析手段と、データ解析結果を判定する判定手段と、判定結果に対応する制御信号を外部へと出力する出力手段とを具備する。計測アルゴリズムが部品化された複数の処理プログラムが拡張ユニットに組み込まれており、パソコンからの指示に従って、処理プログラムが選択され、選択された処理プログラムが所定の順序で実行される。
(もっと読む)
反射型フォトセンサを用いた位置検出装置
【課題】磁気センサや大型マグネットを用いることなく、簡単かつ小型な構成で、1mm以上の位置センシングが良好にでき、また高い分解能の検出が可能となるようにする。
【解決手段】発光素子9と受光素子10を有する反射型フォトセンサ7、移動方向に対し上り傾斜Ka及び下り傾斜Kbを有する形状が形成された反射板8を備え、上記受光素子10では、検出出力が反射板8の移動量に応じて直線的に変化するように、移動方向の中心部から両端へ向かう程、単位長さ当りの面積が広くなる受光領域を設け、上記反射板8をフォトセンサ7の発光/受光面SLに略平行で、かつ発光素子9と受光素子10を結ぶ方向に略垂直となる方向に移動するように配置する。これにより、長い距離でリニアリティがあり、高分解能の検出ができる。
(もっと読む)
反射型フォトセンサを用いた位置検出装置
【課題】磁気センサや大型マグネットを用いることなく、簡単な構成で、1mm以上の位置センシングが良好にでき、反射型フォトセンサの温度特性をキャンセルする。
【解決手段】1対の反射型フォトセンサPR1,PR2を対向配置し、この1対のフォトセンサ間に、可動体に取り付けられた両面反射板5を移動可能に配置し、これらフォトセンサPR1,PR2の2つの出力から反射板5の移動位置を検出する。この位置検出では、反射板の移動距離に応じてリニアな値が得られる演算式を用い、例えば1対の反射型フォトセンサの一方の出力をVo1、他方の出力をVo2とすると、(Vo1−Vo2)/(Vo1+Vo2)の演算式を用いて位置検出を行う。
(もっと読む)
変位計測装置
【課題】クロストークによる検出誤差を軽減し、移動体の高帯域速度変動を高精度に検出することができる変位計測装置を得る。
【解決手段】移動体に設けた光学的に識別可能なマークを照明する第1の発光部と前記マークを介した光を検出する第1の受光部とを備える第1の検出部と、前記第1の検出部に対して前記移動体の移動方向に所定の間隔を隔てて配置され、前記マークを照明する第2の発光部と前記マークを介した光を検出する第2の受光部とを備える第2の検出部と、前記第1の発光部と、前記第2の発光部を時分割で発光させる時分割発光手段と、前記マークのうち同一のマークを前記第1、第2の検出部で各々検出する第1のタイミングと前記第1のタイミングと異なる第2のタイミングを検出する検出手段と、前記検出手段で得られた前記第1のタイミング及び前記第2のタイミングを用いて前記移動体の移動速度を算出する速度算出手段と、を有する。
(もっと読む)
円形状機械部品の測定装置および測定方法
【課題】 測定精度の悪化を防止し、測定対象を正確に拘束し固定することなく簡易に測定できると共に、部品交換に要する工数等の低減を図ることができる円形状機械部品の測定装置および測定方法を提供する。
【解決手段】 円形状機械部品Wにおける円形状部分を成す円の弦となる箇所の幅寸法を測定可能なレーザ変位計2を用い、支持された円形状機械部品Wの形状測定対象に対してレーザ変位計2を対向させて、このレーザ変位計2に、それぞれ前記弦となる任意の2箇所以上の箇所の幅寸法を測定させる。演算手段4は、レーザ変位計2で測定された前記任意の2箇所以上の各箇所の幅寸法を、直交座標系における各両端2点の座標点に変換し、これら各座標点から算出される近似円から、形状測定対象となる前記円形状部分の直径および中心位置を算出する。
(もっと読む)
変位センサ
【課題】計測や感度調整の精度を保証しながら、対象物の種類や計測目的に応じて受光処理の内容を容易に変更する。
【解決手段】受光部1にCMOSリニアイメージセンサ100が導入された変位センサにおいて、CPU3は、リセット信号RSETによりCMOSリニアイメージセンサ100の各画素部の蓄積電荷をリセットした後に、投光制御信号LDONを出力し、ついで受光制御信号PDSWを出力して各画素部に電荷の蓄積を開始させる。また、投光制御信号LDONの出力を終了するより前に受光制御信号PDSWの出力を終了し、読出制御信号STを用いて画像の出力を指示する。また、CPU3は、投光制御信号LDONとの出力の関係を維持することを条件として、CMOSリニアイメージセンサ100から出力された画像中のピークの値に基づき、受光制御信号PDSWを出力する期間の長さを調整する。
(もっと読む)
検査装置
【課題】コストを抑制しながら検査精度を向上させる。
【解決手段】スコープ本体21のロッド部材23には照明ユニット25が設けられ、スコープ本体21の先端部28には反射板27が設けられる。また、照明ユニット25と反射板27との間に位置する挿入軸26には受光窓31が形成される。検査時には、受光窓31が隙間Xに対向するまで、吸排気ポート12,13にスコープ本体21の先端部28が挿入される。そして、照明ユニット25からスコープ本体21の先端部28に向けて光が照射され、この光は反射板27を介して吸排気ポート12,13のポート内壁面33に照射される。このように、簡単な構成によって吸排気ポート12,13の内部からポート内壁面33を照らすことができ、コストを抑制しながら検査精度を高めることが可能となる。
(もっと読む)
積層体、積層体の製造方法、製造装置及び膜厚測定方法
【課題】各層の膜厚測定を可能にする積層体、その積層体の製造方法、及び非破壊非接触で膜厚測定を行いフィルム異常の検査が可能となる膜厚測定方法を提供する。
【解決手段】複数の層を積層してなる積層体である。複数の層の少なくとも一層に対し、予め設定した位置に空隙を形成した。
(もっと読む)
光学式レール変位検出装置
【課題】レーザ光を用いたレール変位の測定に於いて、降雨時の雨滴による光路遮りを低減し且つ降雨時の雨侵入によるガラス汚染を低減して測定精度を向上する。
【解決手段】フード手段とレールとの間にさらに筒型フード手段を設け、筒型フード手段の先端部とレールとの間の間隙をより小さくすると共に筒型フード手段の開口面積すなわち外気に接する箇所を極力小さくすることによって雨滴による照射光及び反射光の光量低下という影響を減ずるようにした。この筒型フード手段は、照射光及び反射光を通過させるためにフード手段に設けられているスリットの開口面を含む大きさの内壁面を備えていれば十分である。従来のフード手段を設けることなく、検出器本体に直接、上記筒型フード手段と同様のものを設け、筒型フード手段の先端部とレールとの間の間隙をより小さくする。
(もっと読む)
円形フランジの歪量測定方法及び円形フランジの歪量測定装置
【課題】円形フランジに機器、部材等を取り付けることなく円形フランジの歪量を測定するための円形フランジの歪量測定方法及び円形フランジの歪量測定装置を提供する。
【解決手段】歪を測定しようとする円形フランジ11の前方に配置されて、特定位置Pから軸心17に対して一定角度θで旋回し円錐面状にスキャンするレーザー光を発して円形フランジ11の測定面12に照射し、測定面12からの反射レーザー光を受光して、特定位置Pから測定面12までの距離を測定するレーザー測定機13と、レーザー測定機13を載せて所定方向にレーザー測定機13の軸心17を向ける位置決め手段15と、レーザー測定機13から取得した特定位置Pから測定面12までの距離の値にcosθを乗算し距離データを得て、距離データから測定面12が完全平面と仮定した基準データを算出し、距離データから基準データを引いて、円形フランジ11の歪量を算出する演算部19とを有する。
(もっと読む)
掘削作業監視システムおよび掘削作業監視方法
【課題】 掘削作業を行う際に、より確実かつ容易に、地下埋設物への損傷を監視する。
【解決手段】 地下埋設物100の上方に埋設された光ファイバ2と、光ファイバ2の一端から光パルスを入射し、反射された光に基づいて光ファイバ2における曲げや切断などの異常を検出する検出器3とを備える。地下埋設物100の埋設場所を油圧ショベル101で掘削すると、バケット101aがまず光ファイバ2に当たり、光ファイバ2が曲がったり切れたりし、検出器3によって光ファイバ2の異常が検出される。
(もっと読む)
面形状検査装置及び面形状検査方法
【課題】全面走査の誤差を蓄積することなく、被検体の表面形状を精度よく測定することができるようにする。
【解決手段】被検体1における複数の注目領域2のうち、1つの注目領域2が回転中心上に位置するように被検体1が載置され、1つの注目領域2を中心にして、被検体1を回転させる回転台3と、被検体1における複数の注目領域2のいずれかに光を照射する光照射部及び注目領域2に反射された光を検出する光検出部を有する複数の光センサ5とを備える。
(もっと読む)
反射基材の評価装置、反射基材の評価方法
【課題】 反射基材の製造工程においてインラインでも評価可能であり、簡易な方法で確実に輝度ムラの発生原因となる基材表面性状を評価することが可能な反射基材の評価装置および反射基材を提供する。
【解決手段】 レーザ変位計3により反射基材の7の表面形状情報を取得する。次に、得られた凹凸情報をフーリエ変換し、反射基材の表面凹凸形状について、周波数と強度との関係を得る。次に、算出された周波数と強度との関係と、あらかじめ設定された基準データとを比較する。所定範囲の周波数領域において、強度が0.6を超える場合には不合格判定を行い、当該判断領域において0.6を超えるデータがなければ合格判定を行う。
(もっと読む)
位置検出装置、ロータリスケール、および位置検出装置を備える液体吐出装置
【課題】受光部における誤検出を防止可能なロータリスケールを具備する位置検出装置、ロータリスケール、および位置検出装置を備える液体吐出装置を提供すること。
【解決手段】被検出物の位置検出を行う位置検出装置であり、発光部62および受光部64を備え、これらの間に空間部613を備えるフォトセンサ60と、空間部613の間に差し掛かるロータリスケール51と、ロータリスケール51に設けられ、第1透光部および第1遮光部が交互に形成される位置検出パターン53と、ロータリスケール51に設けられ、第2透光部および第2遮光部が交互に形成され、通過する光量が位置検出パターン53を通過する光量よりも少なくなる汚れ検出パターン54と、フォトセンサ60を移動させて、位置検出パターン53の検出状態と汚れ検出パターン54の検出状態とを切り替えるセンサ位置切替機構70と、を具備している。
(もっと読む)
セラミック基板の反り検査装置
【課題】反り量を搬送途中で正確に能率よく測定でき、カケの発生を防止するセラミック基板の反り検査装置を提供する。
【解決手段】所定の位置に搬送させる搬送手段と、搬送中のセラミック基板11の全幅を測定対象として通過させながら2次元レーザ変位計12で検出させる検出手段と、検出値を、フィルタを通して整理した反り量を算出させる算出手段とを備え、搬送手段は、セラミック基板11を吸着ヘッド17で吸着して複数の測定テーブル18のそれぞれの上面に連続して載置させるロータリーアクチュエータ13と、測定テーブル18を水平間欠割出回転させながらその上のセラミック基板11の反り量を検出手段と算出手段で測定させるインデックステーブル14と、測定テーブル18の近傍に反り量測定後のセラミック基板11を反り量のランク別に測定テーブル18上から排出させる掻き出し体15を有する。
(もっと読む)
リソグラフィ装置及びデバイス製造方法
【課題】センサ読み取り値のエラーのリスクを低減又は解消する。
【解決手段】第1のフロー特性を有する温度調整流体をセンサのビーム経路の少なくとも一部に提供する第1の出口と、第1の出口に関連付けられ、第1のフロー特性とは異なり、第1の出口から放出される温度調整流体の隣にある第2のフロー特性を有する温度調整流体を提供する第2の出口とを有するリソグラフィ装置。
(もっと読む)
膜厚測定装置および膜厚測定方法
【課題】簡便な光源を利用した場合であっても光の反射による外乱の影響を抑えて光透過性薄膜の厚さを確実に算出できるようにする。
【解決手段】光透過性薄膜102の表面にレンズが合焦した状態では基板101の表面をフォーカスアウトさせて基板101から反射される光が合焦判定の外乱として作用することを防止する一方、基板101の表面にレンズが合焦した状態では光透過性薄膜102の表面をフォーカスアウトさせて光透過性薄膜102から反射される光が合焦判定の外乱として作用することを防止し、基板体100の平面上の同一箇所(xi,yi)で光透過性薄膜102を含めた基板体100の厚さと光透過性薄膜102を除いた基板101のみの厚さの差分に基いて光透過性薄膜102の厚さを適切に算出する。
(もっと読む)
形状検査装置及び形状検査方法
【課題】一度のスリット光の走査により、任意の断面線における断面形状を検査することができる形状検査装置及び形状検査方法を提供する。
【解決手段】撮像光学系12を用いて被検査物20の形状を検査する形状検査装置10であって、被検査物20にスリット光を投射する投射手段13と、スリット光の走査により被検査物20上に順次形成される形状線を撮像する撮像手段14と、順次形成された各形状線の撮像データに基いて、被検査物20の三次元形状を点群データとして取得する点群データ取得手段と、点群データに基いて表示された被検査物に、入力に応じて切断線を設定する切断線設定手段と、切断線に対応した点群データにより、切断線における被検査物20の断面形状を算出する断面形状算出手段とを備えている。
(もっと読む)
平面形状の測定方法
【課題】適切な平滑化スプライン曲面を高速、かつ短時間で算出する。
【解決手段】3次元スキャナーからなるデータ値計測装置1と、サンプリング測度演算器4、平滑化演算器5および画像処理器6をそなえる計算機2と、処理した画像を表示する出力装置3を有する平面形状測定装置を用いて、被検体表面の平面形状を測定するに際し、平滑化演算器において、座標系(x,y)上に任意に分布するm個のサンプリング点と、各サンプリング点に対応した誤差を含むデータ値から曲面を求めるために平滑化スプライン法を用いるものとし、その際、ハット行列において逆行列計算の必要がない汎関数を極小化する曲面f(x,y)を回帰曲面とする。
(もっと読む)
121 - 140 / 644
[ Back to top ]