
Fターム[2F065PP22]の内容
光学的手段による測長装置 (194,290) | 装置全体の構造 (6,881) | 測定器の形態 (1,547) | 投光、受光一体型 (644)
Fターム[2F065PP22]に分類される特許
101 - 120 / 644
三次元形状測定装置
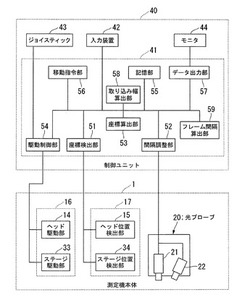
【課題】被検物の一部に単位距離あたりの形状変化が大きい部分があっても、データ取得時間を短くする。
【解決手段】検査光を被検物に照射する照射部21と、検査光と被検物とを相対移動させる移動部と、検査光が照射された被検物を撮像し、撮像結果を出力する撮像部22と、撮像部22の撮像結果に基づいて、前記被検物の三次元形状を前記相対移動の方向に間隔をおいて演算する座標算出部53と、被検物の形状に応じて前記間隔を変更する制御部41と、を備える。
(もっと読む)
光学式タッチパネル及び光学式タッチパネルの製造方法

【課題】部品点数及び製造工程数を削減する。
【解決手段】各々所定方向に配列された複数の発光素子18を備えた一対の発光素子列20,22と、各々所定方向に配列された複数の受光素子24を備え、一方が一対の発光素子列20,22の一方から発光された赤外線IR1を受光し、かつ他方が一対の発光素子列20,22の他方から発光された赤外線IR2を受光する一対の受光素子列26,28と、一対の発光素子列20,22の各々の発光素子18に接続された発光素子用配線30と、一対の受光素子列26,28の各々の受光素子24に接続された受光素子用配線32と、を絶縁性を有する透明な単一の基板12の一方の主面に設けた。
(もっと読む)
三次元計測治具及びこれを用いた三次元計測方法
【課題】棒状ワークの曲がり角度を簡単に計測することができるのに加えて、棒状ワークの計測部位毎の曲がり角度を記録に残すことが可能になる三次元計測治具及びこれを用いた三次元計測方法を提供する。
【解決手段】筒体や柱体等の棒状ワークの曲がり角度を計測するのに用いられる三次元計測治具であって、互いに合体してパイプWの外周に嵌合装着される一対の半円形治具構成体2,2を備え、一対の半円形治具構成体2,2には、レーザ光Lrの送受信を行うことで中心Rpの三次元座標が求められる球状のリフレクタRをスライド可能に保持する外向き溝2bが形成され、リフレクタRを保持する外向き溝2bは、パイプWの治具構成体2,2が装着される部位における断面を算出するのに必要な複数の位置を結んでパイプWの外周に沿ってそれぞれ形成されている。
(もっと読む)
レーザ干渉測長装置の絶対位置測定方法、及びレーザ干渉測長装置
【課題】レーザ干渉測長装置に対する再帰反射体の絶対位置を精度良く測定できる絶対位置測定方法を提供する。
【解決手段】絶対位置測定方法は、予め設定された3つ以上の各位置に再帰反射体をそれぞれ位置付ける工程S1,S4と、回転機構を動作させ、前記各位置にそれぞれ位置付けられた再帰反射体に対して測定光を出射可能とする各姿勢に干渉計を設定する工程S2と、回転機構の動作量に基づいて前記各姿勢間での測定光の光軸の角度変化量を算出する工程S5と、干渉計から出力される信号に基づいて前記各姿勢間での前記光軸に沿う方向の再帰反射体の位置変化量を算出する工程S6と、前記各位置、角度変化量、及び位置変化量に基づいて、レーザ干渉測長装置の基準位置を算出する工程S7と、基準位置に対する再帰反射体の絶対座標を算出する工程S8とを備える。
(もっと読む)
測定方法
【課題】ワーク内部にレーザー光線を集光して改質層を形成する加工装置において、厚さが規格外のワークが搬入されたことを加工前に検出する。
【解決手段】ワーク1を保持手段40に搬入して保持した状態で、光学式の測定手段70により、ワーク1の上面1aの高さ位置を測定する第一の測定工程と基準面に設定した保護テープ10の粘着面10aの高さ位置を測定する第二の測定工程とを行い、第一の測定工程と第二の測定工程とによって得られた値の差分によってワーク1の上面1aから基準面までの距離を検出し、該距離に基づいて、搬入されたワーク1の厚さが規格外であるか否かを判断する。
(もっと読む)
穿孔機械の補助装置および補助装置の制御方法
【課題】穿孔機械の測定値を表示するための補助装置において安全かつ快適な作業が実現される補助装置を得る。
【解決手段】穿孔機械と連結可能な補助装置において、穿孔機械の作業平面に対する傾き、および/または、穿孔機械の作業平面までの距離を含む測定データを求めるための測定装置と、求められた前記測定データに応じて作業平面上にシンボルを投影するプロジェクタと、を設ける。
(もっと読む)
光学式変位センサ及び該光学式変位センサにおける段差検出方法
【課題】段差候補となる期間を検出してから、ベルトコンベア等の搬送装置の振動等による変位量の変動、時間方向の変位量の変動の影響を低減し、より確実に段差を検出することができる光学式変位センサ及び該光学式変位センサにおける段差検出方法を提供する。
【解決手段】受光器の出力に基づいて検出対象物の変位量を算出し、所定のタイミングでサンプリングする。前回サンプリングした変位量と今回サンプリングした変位量との差分値を算出し、算出した差分値に基づいて段差期間と非段差期間とを判別する。段差期間と判別された期間における差分値の積算値を算出し、段差期間と判別された期間ごとに算出した積算値の最大値と第一の閾値とを比較して段差であるか否かを判別する。
(もっと読む)
乗員検知装置
【課題】乗員とチャイルドシートとの存在を精度良く判定する。
【解決手段】乗員検知装置10は、単眼距離画像センサ11から出力される距離画像に基づき、乗員の頭部領域を検知する頭部領域検知部52およびシートの領域を検知するシート領域検知部53と、シートの領域を距離画像から除去して得られるシート領域除去画像に基づき、頭部領域を有する乗員領域の体積を推定し、該体積が所定体積範囲内であるか否かを判定する体積判定部54と、乗員領域の体積が所定体積範囲内であると判定された場合に、頭部領域の断面画像と乗員領域の断面画像とを比較し、乗員の肩部の有無を判定し、乗員の肩部が存在すると判定された場合には乗員領域には大人が存在すると判定し、乗員の肩部が存在しないと判定された場合には乗員領域にはチャイルドシートおよび該チャイルドシートに着座した子供が存在すると判定する乗員判定部56とを備える。
(もっと読む)
内燃機関の変位計測装置
【課題】車両に搭載された内燃機関の変位量を容易にして精度良く計測可能な内燃機関の変位計測装置を提供する。
【解決手段】変位測定手段による第1被測定体と第2被測定体の測定結果に基づいて内燃機関の変位量を算出する変位量算出手段を備え、該変位量算出手段は、第1被測定体の第1測定面上に変位測定手段による測定点を含んで形成される第1直線部分l1、l'1の延長線と第2被測定体の第2測定面上に変位測定手段による測定点を含んで形成される第2直線部分m1、m'1の延長線との交点P(X、Z)、P'(X'、Z')を求め、該交点の第1直線部分と第2直線部分とにより形成される基準平面上での変位を演算することで内燃機関の変位量を算出する。
(もっと読む)
表面検査装置
【課題】スリット光によって測定対象物に形成される光切断線における干渉縞を低減して良好に表面測定が行われる表面検査装置を構成する。
【解決手段】半導体レーザLDからのレーザ光LBから直線状の領域に拡がるスリット光Sを作り出してワークに照射し、これを撮影ユニットで撮影した画像データからスリット光Sが照射された光切断線を抽出してワークの表面形状データを生成するように表面検査装置を構成する。半導体レーザLDが、PN接合型で接合面の境界部分に沿って直線方向Mに形成される発光層17を有し、この直線方向Mが、スリット光Sの拡がり方向と直交するように相対的な姿勢を設定した。
(もっと読む)
形状測定システム及び形状測定方法
【課題】スキャナを用いた形状測定システムにおいて、いわゆる手振れによる測定誤差を低減することをその目的とする。
【解決手段】形状測定システム1は、多関節アームの先端に取り付けられ、測定対象Aに対し手動で移動可能であり、測定対象Aに対しレーザ光を照射しその反射光を、光センサ61の複数の受光ラインで順次検出するスキャナ21と、スキャナ21の手振れ情報を光センサ61の受光ライン毎に取得する加速度センサ42と、各受光ラインのスキャナ21の手振れ情報に基づいて、受光ライン毎に画像の位置情報を補正する手振れ補正部80と、スキャナ21の画像情報と手振れ補正部80で補正された画像の位置情報に基づいて、測定対象Aの画像を生成する画像生成部100と、を有する。
(もっと読む)
平面度測定装置
【課題】変位計と測定対象物との間の相対移動に起因する誤差を適切に補正すること。
【解決手段】測定対象物の一次元形状を測定する変位計と測定対象物との間の相対位置をずらしながら測定対象物の平面度を測定する平面度測定装置は、第1方向の第1測定ラインに沿って被測定面の一次元形状を測る第1測定と、第1測定ラインと第1交差点P2で交差する第2方向の第2測定ラインに沿って被測定面の一次元形状を測る第2測定と、第2測定ラインおよび第1測定ラインとそれぞれ第2交差点P3および第3交差点P1で交差する第3方向の第3測定ラインに沿って被測定面の一次元形状を測る第3測定と、第1測定による第1の一次元形状を示す第1の測定値列DL1、第2測定による第2の一次元形状を示す第2の測定値列DL2、および第3測定による第3の一次元形状を示す第3の測定値列DL3を第1交差点P2乃至第3交差点P1においてそれぞれ一致させるように第1の測定値列DL1乃至第3の測定値列DL3を補正する補正処理と、を行う。
(もっと読む)
画像認識装置、装着型ロボット、及び画像認識プログラム
【課題】画像認識用のカメラの高さを自動的に検出する。
【解決手段】カメラ位置22には、前方斜め下に向けた画像認識装置用の撮像カメラ5が設置されており、その上方の光源位置21には、撮像カメラ5の画面フレーム31の内部に投影像26を投影する光源装置4が設置されている。装着型ロボットに搭載された画像認識装置は、画面フレーム31の下端と投影像26の下端との距離である投影像オフセットx2を画像データで計測し、投影像オフセットx2とカメラ高さy2を対応させた対応データマップや、あるいは計算によりカメラ高さy2を取得する。このようにして得られたカメラ高さy2は、パラメータとして記憶装置に記憶され、画像認識装置で段差などの認識するのに使用される。
(もっと読む)
電磁波イメージング装置
【課題】測定表面が曲面であっても確実にその表面状態をイメージングする。
【解決手段】構造物の曲面に電磁波を複数の送信アンテナからそれぞれ放射する複数の送信回路と、構造物の構造物物の曲面で反射した電磁波を複数の受信アンテナでそれぞれ受信する複数の受信アンテナとを有し、送受信アンテナ13aと送受信回路13bとが一体化された複数のミリ波モジュール13をコンクリートポールCPの曲率に合わせて円弧状にアレイ化して配置する。
(もっと読む)
板材溶接部の段差量の測定方法および装置
【課題】板材を搬送中に、オンラインで板材の溶接部における段差量を正確に測定することができる板材溶接部の段差量の測定方法および装置を提供する。
【解決手段】溶接により複数の板材をつなぎ合わせた板材Sを搬送しながら、前記板材Sの溶接部S3の溶接線を横切る線上において前記板材Sまでの距離を非接触でかつ同時に多点計測し、前記計測した距離をもとに前記溶接部S3における前記鋼板Sの段差量を算出する。好ましくは、前記溶接線を横切る線上に配列した複数のレーザ距離計41aにより前記多点計測を行なう。
(もっと読む)
コンベヤスケール
【課題】 重量測定方式と非接触測定方式との両方の要素を備えることによって、被輸送物の輸送量を求めるというコンベヤスケール本来の機能を確実に保証しつつ、特に重量測定方式の要素に故障等の異常が発生したときに、これを簡単な構成で検知する。
【解決手段】 本発明のコンベヤスケール10は、計量ローラ18と2台のロードセル22および24とを含む重量測定系と、7個の非接触型距離センサ30〜42を含む非接触型測定系と、を備えている。重量測定系が正常なときは、当該重量測定系によって求められた被輸送物100の精確な輸送量が制御装置50のディスプレイに表示される。重量測定系に異常が発生したときは、非接触型測定系によって求められた副次的に精確な輸送量が表示される。なお、重量測定系が正常であるか否かは、重量測定系によって求められた輸送量と非接触型測定系によって求められた輸送量との比較に基づいて、判定される。
(もっと読む)
スポット溶接検査方法および装置
【課題】広範囲領域でのスポット溶接の有無、およびスポット溶接位置の検査を可能とするスポット溶接検査方法および装置を提供する。
【解決手段】スポット溶接を施した溶接母材に対して斜光を照射する第1の投光機と、上方から溶接母材の画像を取得する撮像機と、第1の投光機および撮像機を搭載し、溶接母材に対する位置調整可能な走査装置と、撮像機からの画像情報を処理する処理装置から構成され、処理装置は、撮像機から得られた3階層レベルの輝度の第1の画像から、中間輝度レベルと中間輝度レベル以外の輝度の2階層レベルの輝度で構成された第2の画像を得、中間輝度レベル以外の輝度の部分をスポット溶接のエッジ部分とする第1の手段、第1の手段によるエッジ部分からスポット溶接の中心位置を決定する第2の手段を備える。
(もっと読む)
モルホロジー補正印刷
【課題】非平坦な基体表面上に液滴を付着させるときの液滴配置誤差を減少させる。
【解決手段】基体の表面プロファイルを、液滴吐出装置の複数のノズルが配列する方向と平行な方向に沿って該基体を測る変位計測器のアレイを用いて、前記基体と前記液滴吐出装置との相対移動の方向に対して垂直な方向であって前記ノズルが配列する方向に沿った複数の位置で同時に、測定する。
(もっと読む)
架空設備用支持物の負荷応力推定方法及び柱状構造物の形状測定方法
【課題】架空設備用支持物の負荷応力を簡便な手順で精度良く推定する方法を提供する。
【解決手段】架空設備用の支持物に対して、支持物を中心とする方位角で50°以上離され、かつ支持物との距離が支持物の高さの0.2倍以上60倍以下の範囲内である少なくとも2箇所の測定点から、測距方式の三次元形状測定装置を用いて支持物の表面形状を測定する工程と、測定した支持物の形状情報から、支持物の高さ方向に沿って支持物の水平方向断面の中心位置を結ぶ計測中心線と、支持物の地際位置における中心を通って鉛直方向に延びる基準中心線とを算出する工程と、計測中心線と、基準中心線とを比較することにより、支持物の各高さ位置における水平方向の変位値を算出する工程と、変位値を用いて、支持物と同等品の実測データに基づく検量線を参照することにより、測定対象の支持物の負荷応力を推定する工程と、を有することを特徴とする。
(もっと読む)
変位センサシステムに適用する拡張ユニット
【課題】センサシステムを構成するアンプユニットから時系列的に得られる計測データに対して所望の解析処理を適用し、その解析結果に対応する出力を生成することが可能なセンサシステムに適用される拡張ユニットを提供すること。
【解決手段】アンプユニットに連装される拡張ユニットには、計測データ蓄積メモリと、伝送ラインを介して到来する計測データを取得して前記メモリに蓄積する計測データ取得手段と、蓄積された一連の計測データを所定のアルゴリズムに従って解析するデータ解析手段と、データ解析結果を判定する判定手段と、判定結果に対応する制御信号を外部へと出力する出力手段とを具備する。計測アルゴリズムが部品化された複数の処理プログラムが拡張ユニットに組み込まれており、パソコンからの指示に従って、処理プログラムが選択され、選択された処理プログラムが所定の順序で実行される。
(もっと読む)
101 - 120 / 644
[ Back to top ]