
Fターム[2F065PP22]の内容
光学的手段による測長装置 (194,290) | 装置全体の構造 (6,881) | 測定器の形態 (1,547) | 投光、受光一体型 (644)
Fターム[2F065PP22]に分類される特許
81 - 100 / 644
検測車動揺補正方法及び装置、並びに検測方法及び装置
【課題】検測車走行時における車体動揺(ローリング及びヨーイング等)の影響を受けることなく検測できるようにする。
【解決手段】検測装置はレールに沿って走行する検測車両に搭載されており、車両の運行に関する周辺構造物の状態(サードレールの高さ)を測定する。検測車両には、検測車両の走行中に車両自体がレールに対して動揺する状態(車両のローリング及びヨーイング等)を測定する動揺状態測定手段が搭載されている。検測装置は、動揺状態測定手段によって測定された検測車両の動揺状態に基づいてその検測結果を補正する。これによって、検測装置は検測車走行時における車体動揺(ローリング及びヨーイング等)の影響を受けることなく正確な検測を行うことができる。
(もっと読む)
エッジ検出装置

【課題】金属粗面上におけるエッジの検出が可能であるエッジ検出装置を提供する。
【解決手段】フォーカス検出部150を備え、被測定物6を照射光ビームがスキャンしながら、かつ被測定物と投光系110との間の距離を変化させることで、被測定物にて反射した反射光を分割光検出器にて、複数回、検出を行う。得られた複数の反射光信号の振幅に着目し、振幅が最大となる場合の投光系の照射方向位置を求めることで、被測定物に対する投光系の合焦位置を検出する。このような合焦状態において、被測定物を光ビームでスキャンすることで、エッジ検出部160は、被測定物のエッジを検出する。
(もっと読む)
タイヤ寸法測定方法及びタイヤ寸法測定装置
【課題】タイヤの寸法測定において、正確かつ確実にタイヤ幅及びタイヤ外径を測定することを可能にするタイヤ寸法測定方法及びタイヤ寸法測定装置を提供する。
【解決手段】タイヤTをリム組みし、内圧が印加されたタイヤTと、当該タイヤTの幅方向に互いに対向して配置される測定手段41とを相対的に回転させながら、測定手段41を、タイヤTが1回転する間にタイヤ側面におけるタイヤトレッドからビードまでの範囲をタイヤ半径方向に沿って走査させ、測定手段からタイヤ側面までの距離の変位量に基づいてタイヤ幅寸法を測定するようにした。
(もっと読む)
膜厚むら検査装置及び方法
【課題】検査に適切な明るさやコントラストの画像を取得し、膜厚むら検査装置及び方法を提供する。
【解決手段】表面に皮膜が形成された基板を一方向に移動させながら、基板に形成された皮膜の膜厚むらを検査する装置及び方法であって、皮膜の厚みを検出する膜厚検出部を備え、光源部は、撮像部側に配置された反射照明部3aと、基板を挟んで撮像部に対向する位置に配置された透過照明部3bを備え、撮像部4は基板との相対角度を調節する撮像部角度調整手段を備え、反射照明部は反射照明部と基板との相対角度を調節する反射照明角度調整手段を備え、透過照明部は透過照明部と基板との相対角度を調節する透過照明角度調整手段を備え、膜厚検出部からの膜厚情報に基づき、反射照明角度調節手段及び透過照明角度調整手段を制御し、反射照明の光量及び透過照明の光量を調節する制御部を備えたことを特徴とする膜厚むら検査装置及び方法。
(もっと読む)
変位センサ
【課題】分解能を維持しつつ広い計測レンジで変位を測定することが可能な変位センサを提供する。
【解決手段】センサヘッド100は、レーザダイオード1と、フォトダイオード2と、偏光ビームスプリッタ(PBS)3と、レンズ4〜6と、ピンホール7aが形成された絞り板7と、アーム8a,8bを有する音叉状の振動子8と、振動子8のアーム8aに取り付けられたレンズ9(コリメートレンズ)と、振動子8のアーム8bに取り付けられたレンズ10(対物レンズ)とを備える。レンズ9の焦点距離は、レンズ10の焦点距離の2倍以下、好ましくは1倍と定められる。
(もっと読む)
対象物検出装置、対象物検出方法
【課題】処理負荷を大きくすることなく、検出対象物が遠近離れて複数存在する場合の検出精度を高める。
【解決手段】入力画像に関する撮像対象までの距離情報を取得する距離情報取得部と、距離情報に基づいて、入力画像に対して距離区分を設定する距離区分設定部と、距離区分毎に、探索ウィンドウのサイズを設定するウィンドウサイズ設定部と、距離区分毎に、設定されたサイズの探索ウィンドウを用いて入力画像のスキャンを行なうスキャン部と、探索ウィンドウ内から検出対象物の検出処理を行なう検出処理部とを備えた対象物検出装置。
(もっと読む)
透光性板状物体の厚さ測定装置
【課題】 透光性板状物体の厚さを全域にわたって短時間で精度よく測定する。
【解決手段】 測定用レーザ光をガラス板Gの表面及び裏面で反射させて、反射光をラインセンサ55に導いてガラス板Gの厚さを測定する。測定用レーザ光は、Y軸線回りに回転可能なガルバノミラー45及びX軸線周りに回転可能なガルバノミラー51を介してガラス板Gに照射される。サーボ用レーザ光も、ガルバノミラー45,51を介してガラス板Gに照射され、反射光はガルバノミラー45,51を介して4分割フォトディテクタ66に導かれる。4分割フォトディテクタ66により、ガラス板Gの表面のX軸及びY軸線回りの傾きが検出され、この傾きに応じてガルバノミラー45,51を駆動するサーボ制御により、測定用レーザ光をガラス板Gに対して常に一定方向から入射させる。
(もっと読む)
微細非周期パターン投影装置および方法とそれを用いた三次元計測装置
【課題】ユニークな特徴をもつ非周期パターンを投影して、なめらかな表面をもつ物体の三次元形状を計測する。
【解決手段】2種の菱形で構成した非周期パターン模様をワークに投影しステレオカメラで計測する。
(もっと読む)
露光装置及び露光方法、並びにデバイス製造方法
【課題】移動体を精度良く駆動する。
【解決手段】 ウエハWを保持し所定面内で移動するウエハステージWSTと、所定面内と実質的に平行に配置される移動スケール44A〜44Dに、複数のヘッド48a〜48kを介してそれぞれ所定平面と交差する方向からビームを照射して、ウエハステージWSTの位置情報を計測するエンコーダシステムと、エンコーダシステムの計測情報に基づいてウエハステージWSTを制御する制御システムによって、複数のヘッド48a〜48kのうち移動スケール44A〜44Dと対向する複数のヘッド48a〜48kの数が変化するとともに、ウエハステージWSTの移動によって、複数のヘッド48a〜48kのうち位置情報の計測に用いられるヘッドが別のヘッドに切り換わる。
(もっと読む)
位置検出装置
【課題】パネル上に穴加工の基準となる目標点の座標を短時間で検出することが可能な位置検出装置を提供する。
【解決手段】本発明に係る位置検出装置1は、被測定面と交差する方向の高さを有する基準ボルトBの頭部Btに直線光を照射し、その反射光から基準ボルトBの頭部Btまでの距離を測定する光学センサ2と、直線光を照射方向と交差する2つの方向へ移動させる回転支軸3と、光学センサ2により所定の値の距離が測定された時点の回転支軸3の移動位置を検出する位置センサと、この位置センサから得られた複数の位置データから2つの移動方向により規定される平面において、基準ボルトBの略中心にあるボルト穴Pbの中心の座標を演算する演算部と、を有するものである。
(もっと読む)
座標入力装置
【課題】複数の要素によって構成される座標入力装置において、各要素をより正確な位置関係で配置することを容易とする。
【解決手段】入射光を、入射光の入射方向へと反射する再帰反射部材が配置されたフレームと、再帰反射部材へと光を投光する投光手段、及び投光手段によって投光され再帰反射部材によって反射された光を受光する受光手段を備えるセンサユニットと、を備え、フレームとセンサユニットとが座標入力領域の周囲に所定の位置関係となるように配置された際に、座標入力領域に対する入力位置を検出する座標入力装置。フレームは、フレームとセンサユニットとが所定の位置関係となるように配置された際に、センサユニットの投光手段から投光された光を、センサユニットの受光手段へと反射するように配置された鏡面部材を備える。
(もっと読む)
塗布膜の検査装置
【課題】大型ガラス基板に各種画面サイズのカラーフィルタが面付けされ、面付け余白が生じて基板端から表示領域を画定する額縁部近傍までの幅においてフォトレジストが塗布されていない基板に対しても、外観上の広域欠陥の検査を正常に行える機構を有した塗布膜の検査装置を提供する。
【解決手段】被検査体の基板を披検査体テーブルの支持ピン上に保持した状態で、基板流動方向に走査可能に移動する検査位置に対して真下の位置に配置された透過光源部から検査光を当て、被検査体を透過した透過光を、透過光源部と同じ方向に一体的に移動する検査位置に対して真上の位置に配置された撮像カメラで受光してその輝度変化を検出する塗布膜の検査装置において、前記被検査体テーブルの基板流動方向の両端部に外乱光遮断用のシャッターが設けられ、該シャッターが両端部から前記被検査体の基板の内側にむけてその遮光領域を可変に制御する機構を具備している。
(もっと読む)
シャフトの変形を測定するための装置及び方法
【課題】 シャフトの変形を測定するための装置及び方法を提供する。
【解決手段】 デバイスによってシャフト2の変形を測定するための方法が、変形が加えられる前に、シャフト2に付加されたパターン3を照明するステップと、パターン3によって反射された放射線を検出することによって第1基準位置を検出するステップとから成り、変形が加えられた後に、パターン3を照明するステップと、パターン3によって反射された放射線を検出することによって第2基準位置を検出するステップとから成る。これにより、第1基準位置と第2基準位置との間の距離に基づいて、シャフトの円周方向の変形及び/又はトルクが求められる。
(もっと読む)
コレット位置検出方法及び装置
【課題】簡便に且つ精度上の制限を受け難い状態でコレットの位置を検出し得るコレット位置検出方法及び装置を提供する。
【解決手段】基準座標系において、半導体チップTのピックアップステージ4とボンディングステージ5との間の所定の座標に光センサ9を配置し、一方向にコレット80を移動させながら、コレットまたはその装着部の縁部を光センサ9で検知することにより、2つの縁部の中心である第一中央位置の座標値を検出し、一方向に直交する方向に同様の移動及び検知を行なって2つの縁部の中心である第二中央位置の座標値を検出し、第一中央位置及び第二中央位置からコレット中心の検出座標値を求め、該検出座標値に基づいてコレットの設定座標値を補正することを特徴とするコレット位置検出方法及び該方法を実施するための検出装置。
(もっと読む)
計測装置及び画像形成装置
【課題】記録媒体の変位に追従して外周面が変位させられる追従部材の変位量を、回転体の偏心の影響を受けずに計測すること。
【解決手段】計測装置200は、搬送路32に沿って搬送される記録媒体Pに外周面を接触させ、記録媒体Pの変位に追従して当該外周面が変位させられる追従部材210と、当該外周面の変位量を光学的に計測する変位量計測手段とを有する。
(もっと読む)
真直度測定装置
【課題】ストレートエッジと同等の精度で真直度の測定、調整ができる小型軽量安価な真直度測定装置の提供。
【解決手段】光位置センサ7が、測定対象12に沿って摺動させられつつ、光ビーム出力部1からの光ビームを受光した平面上の位置を検出することにより、測定対象12の真直度を測定する真直度測定装置。光ビーム出力部1及び光位置センサ7間の距離を距離センサ6が測定し、受光する平面上の任意の位置を基準位置として受付け、校正動作時に、基準位置及び光位置センサ7が検出した位置の差を算出し、算出した差を、位置の検出時に距離センサ6が測定した距離と共に記憶しておき、測定動作時に、基準位置及び光位置センサ7が検出した位置の差を算出し、算出した差から、位置の検出時に測定した距離に対応して記憶している差を差引いた結果を距離と共に表示部11に表示する構成である。
(もっと読む)
変位検出装置、露光装置、及びデバイス製造方法
【課題】うねりによる影響を極力無くして被検面の変位量を検出する。
【解決手段】 対物レンズ18は、光源13が発した光束を被検面23a上に微小なビーム光として投射する。シリンドリカルレンズ21は、被検面23aで反射した反射光束に非点収差を与える。受光センサ19は、非点収差が与えられた反射光束を入射させて受光パターンに応じた出力変化が得られるように受光面が複数に分割されている。信号処理部26は、受光面から得られる変位信号に基づいて被検面23aの変位を検出する。表面すねり補正部28は、変位信号に基づいて表面のうねりの周期ピッチを求め、その時点の被検面23a上のビーム径が周期ピッチよりも大きくなるように集光レンズ20と受光面19aとの間隔を変え、これに連動して対物レンズ18を移動する。
(もっと読む)
変位検出装置、露光装置、及びデバイス製造方法
【課題】変位量への換算を迅速に処理する。
【解決手段】 対物レンズ18は、光源13が発した光束を被検面23a上に微小スポットとして投射する。シリンドリカルレンズユニット21は、曲率半径の異なる2つのシリンドリカルレンズ30,31をもっており、それぞれに被検面23aで反射した反射光束に異なる量の非点収差を与える。受光センサ19は、非点収差が与えられた反射光束を入射させて受光パターンに応じた出力変化が得られるように受光面が複数に分割されている。信号処理部24は、受光面から得られる出力信号に基づいて被検面23aの変位を検出する。選択部33は、被検面23aの検出範囲に応じて、いずれか一方のシリンドリカルレンズ30,31を光路上にセットするように移動機構22を制御する。
(もっと読む)
蒸気発生器の隙間計測装置
【課題】伝熱管と伝熱管振れ止め金具の隙間を精度よく計測することができる蒸気発生器の隙間計測装置を提供することにある。
【解決手段】蒸気発生器の内筒内に配設される多数本の伝熱管と、隣接する伝熱管の間に配置される伝熱管振れ止め金具の隙間を計測する蒸気発生器の隙間計測装置10であって、光を出射する発光器14と、発光器14から出射された光を受光し光量を計測する受光器15と、発光器14および受光器15がそれぞれ先端部に取り付けられ所定の長さを有す一対の支持棒11,12と、発光器14と受光器15が対向して配置され、一対の支持棒11,12の基端部に連結して設けられた連結材13とを具備するようにした。
(もっと読む)
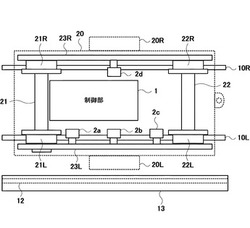
ワーク寸法測定装置
【課題】円形ワーク等を含む種々のワークの形状を短時間で簡易かつ正確に測定できるワーク寸法測定装置を提供する。
【解決手段】ワークWを挟んで両側に位置させられ、ワークWに向けて一定長の線状レーザ光Lを照射する一対のレーザ変位計4A,4Bと、これらレーザ変位計4A,4Bを互いに対向する方向で離間ないし接近方向へ移動させるスライダ機構2A,2Bと、ワークWに照射された線状レーザ光LがワークWの表面に線像を生じさせた際の移動距離に基づいてワークWの外形寸法を算出するパソコン6とを備える。ワークWは円形であり、その外周面に生じる線像は頂点を有する円弧状をなし、パソコン6は上記移動距離と頂点の位置に基づいてワークWの外径を算出する。
(もっと読む)
81 - 100 / 644
[ Back to top ]