
Fターム[2F065PP22]の内容
光学的手段による測長装置 (194,290) | 装置全体の構造 (6,881) | 測定器の形態 (1,547) | 投光、受光一体型 (644)
Fターム[2F065PP22]に分類される特許
161 - 180 / 644
キャリブレーション治具およびこれを用いた撮像装置のキャリブレーション方法
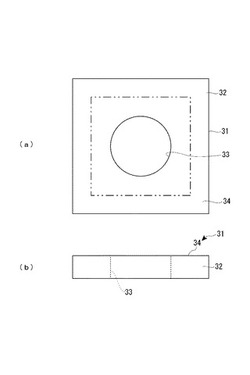
【課題】コンパクトで、簡単且つ精度良く製作することができるキャリブレーション治具およびこれを用いた撮像装置のキャリブレーション方法を提供することである。
【解決手段】表面にセットステージ2と平行な平坦面34を有するベース32と、平坦面34に貫通形成され、レーザー変位計5の基準位置を取得するために輪郭形状を測定され、且つ認識カメラ4の基準位置を取得するために周縁部と共に撮像される共通基準孔33と、を備え、共通基準孔33は、レーザー変位計におけるレーザースポットのスポット35径より大きく、且つ認識カメラ4の視野に収まる大きさに形成されているものである。
(もっと読む)
ウエハ反り量測定方法及び測定装置

【課題】安価で狭い視野のレンズ系でウエハの反りを測定可能にする。
【解決手段】ウエハ10を回転テーブル12上で回転させながら、レーザー距離計28によりウエハ10のエッジとレーザー距離計28との距離を非接触で測定する。次に、この距離の最大値と最小値との差をウエハ10の反り量として計算する。これにより、従来の測定方法のようにウエハ10の全面を測定することなく、ウエハ10の反り量を測定する。
(もっと読む)
物体表面傷の計測方法
【課題】物体表面に摩耗や撓み等が存在する場合、表面上に障害物が存在するような場合に1回の計測範囲を超える長さに渡って計測する場合においても物体表面の傷を高精度で測定することが可能な物体表面傷の計測方法を提供する。
【解決手段】物体3の両端間に部材2を設け水平板6を押しつけて変形硬化させ、水平板を取り外し物体両端と部材表面とを結ぶ基準線を設定し、計測器を設置し、計測器を基準線に沿って移動させ物体表面までの距離を測定して傷の分布を示す第1の計測データを取得し、計測器を次の計測範囲内に設置し、計測器を移動させ物体表面までの距離を測定して第2の計測データを取得し、第1の計測データと第2の計測データとを連結させたデータを取得する。
(もっと読む)
位置を測定するためのリソグラフィ装置および方法
【課題】位置精度性能が向上した、改善されたリソグラフィ装置を提供する。
【解決手段】基準構造に対してある方向に移動可能である支持部と、第1の周波数範囲内で上記方向における基準構造に対する支持部の位置を表す第1測定信号を提供するように構成される第1位置測定システムと、第2の周波数範囲内で上記方向における基準構造に対する支持部の位置を表す第2測定信号を提供するように構成される第2位置測定システムと、(a)第2周波数範囲内の周波数を有する信号成分を減衰させるように第1測定信号をフィルタリングし、(b)第1周波数範囲内の周波数を有する信号成分を減衰させるように第2測定信号をフィルタリングし、(c)フィルタリング後の第1測定信号とフィルタリング後の第2測定信号とを結合して、上記方向における基準構造に対する支持部の位置を表す結合測定信号を生成するように構成されるプロセッサと、を備える。
(もっと読む)
レーザー変位計による計測方法とその制御回路
【課題】 レーザー変位計を用い、予めの測定情報の設定を行うことなく、簡便且つ精度高く測定物の表面状態を検査できるようにすることにある。
【解決手段】 測定物1の表面状態を検査するレーザー変位計による計測方法であって、レーザー変位計3をリニアエンコーダー5を実装したZ方向への移動ステージ4に装着し、測長範囲dのd/2の位置レベルの電圧出力が常に0Vとなるようにリニアエンコーダー5を介して移動ステージ4をZ方向に移動させることにより、測定物1の表面とレーザー変位計3との距離Dを一定に維持することを特徴とするレーザー変位計による計測方法とその制御回路である。
(もっと読む)
膜構造測定方法及び表面形状測定装置
【課題】測定対象膜に照明光を照射して測定される表面形状データ及び界面形状データから、この測定対象膜の屈折率を得ることができる膜構造測定方法及び表面形状測定装置を提供する。
【解決手段】表面形状測定装置の制御用プロセッサで実行される膜構造測定方法は、撮像装置により、物体に形成された測定対象膜に光を照射し、当該光の反射光からこの測定対象膜の表面の形状である表面形状データ及び測定対象膜と物体との界面の形状である界面形状データを測定するステップ220と、平均値がほぼ0となるように表面形状データ及び界面形状データの各々を基準面を用いて補正することにより、補正された表面形状データ及び補正された界面形状データを算出するステップ230と、補正された表面形状データ及び補正された界面形状データから、測定対象膜の屈折率を算出するステップ240と、を有する。
(もっと読む)
駆動装置
【課題】測定装置に設けられたエアシリンダの内圧をより簡単に調整できるようにする。
【解決手段】エアシリンダ62には、被検物の形状を測定するプローブ26が固定されており、リニアアクチュエータによりエアシリンダ62の稼動部63を上下に移動させることで、プローブ26が移動する。また、稼動部63内部には、上部空間65と下部空間66とが設けられており、上部空間65への空気の注入量を調整することにより、稼動部63に対して上下方向に加わる力のバランスが調整される。上部空間65への空気の注入量は、稼動部63を移動させるリニアアクチュエータに供給される駆動電流の値に基づいて求められる。本発明は、形状測定装置に適用することができる。
(もっと読む)
フォトインターラプター用遮光板および位置検出装置
【課題】フォトインターラプターを、アームやギアなどといった可動部材の位置検出に応用する場合、位置検出の対象である可動部材に取り付けられる遮光板と、フォトインターラプターとのクリアランスを厳密に調整しないと、遮光不良が生じたり、遮光板とフォトインターラプターとが接触したりして、部材の位置を正確に検出することができないため、装置の組み立てや調整のためのコストが上昇するという課題があった。
【解決手段】フォトインターラプター666用の遮光板6631に、遮光部材6632を取り付けることによって、フォトインターラプター666における遮光不良を防止する。
(もっと読む)
ワイヤロープピッチの測定方法とワイヤロープピッチ測定装置およびワイヤロープの製造方法
【課題】ワイヤロープのピッチを正確に測定することのできるワイヤロープピッチの測定方法とワイヤロープピッチ測定装置を提供し、さらに、ワイヤロープピッチに関する品質不良の発生を抑制できるワイヤロープの製造方法を提供する。
【解決手段】ワイヤロープ30の側面に対向させたレーザ変位センサを用いて、ワイヤロープの径方向断面に沿ってワイヤロープ30の側面にレーザ光32を照射して該側面の変位の計測を行いつつ、レーザ変位センサをワイヤロープ30の長さ方向に相対移動させ、レーザ変位センサのワイヤロープ30に対する前記長さ方向の相対位置と前記変位の計測値との関係から前記ワイヤロープのピッチを算出する。
(もっと読む)
眼鏡フレームを測定するための測定装置
本発明は、レンズフレームがレンズ形状に対応する内接表面範囲Fを少なくとも部分的に定めている、眼鏡フレーム(2)の当該レンズフレーム(2.1)の内側を測定するための測定装置(1)に関し、眼鏡フレーム(2)を取り付けるための保持装置(3)と、レンズフレーム(2.1)の評価されるべき領域に投光される光ビーム(4.1)を生成するための少なくとも1つの光源(4)と、反射された光ビーム(4.1)を検出するための、評価ユニット(1.1)に結合され得る少なくとも1つのセンサ(5)と、を備え、前記保持装置(3)は、回転軸rの周りを回転され得ると共に、移動軸xの方向に移動され得て、前記移動軸xは、前記回転軸rに対して垂直な方向に少なくとも1つの移動成分を有する。前記保持装置(3)は、眼鏡フレーム耳あて部(2.2、2.3)によって眼鏡フレーム(2)を固定するために使用され、前記保持装置(3)の領域に少なくとも1つの自由空間(3.1、3.2)が設けられており、前記自由空間は、保持されるべき眼鏡フレーム(2)の、畳み込まれていない、または、畳み込まれることができない、前記眼鏡フレーム耳あて部(2.2、2.3)を受けるために使用される。 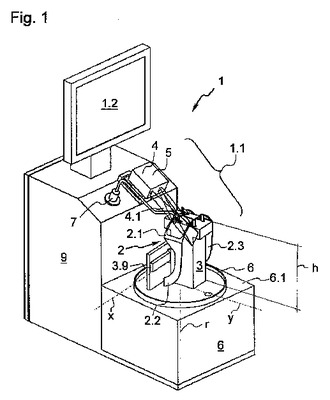 (もっと読む)
(もっと読む)
測定システム及びその校正方法
【課題】 測定物の位置に関わらず、正しい演算結果が得られるように校正する作業を簡略化することができる測定システムを提供する。
【解決手段】 センサ出力から測定値y2を求める子機コントローラ30と、センサ出力から測定値y1を求める親機コントローラ20により構成される。親機コントローラ20は、測定値y1及びy2から測定物の厚さを示す演算値zを求め、第1及び第2校正用測定物の既知の厚さとして、第1及び第2目標値を記憶し、第1校正用測定物から得られた測定値y2を記憶する。そして、第1校正用測定物を測定軸方向に移動させて得られた測定値y2と測定値記憶部24a内の測定値y2との間の変化量に基づいて、測定値y1の校正を実行する。また、第1校正用測定物から算出された第1演算値を記憶し、第1及び第2目標値と第1演算値と第2校正用測定物から算出された第2演算値とに基づいて、演算値zの校正を実行する。
(もっと読む)
変位量計測装置、及び、変位量計測装置の姿勢角決定方法
【課題】高速な振動現象の下にあっても、エンジンマウントのマウント軸として配設されるボルトの中心の3軸並進量、及び、該ボルトの2軸回転量を高精度に算出することができる、変位量計測装置、及び、変位量計測装置の姿勢角決定方法を提供する。
【解決手段】エンジンマウント10のマウント軸であるボルト12の両端に固定した、半径が既知である2個の球体13・13の変位を、それぞれについて3箇所ずつレーザー変位計31〜33、34〜36で計測する球体変位計測工程と、球体変位計測工程で計測した球体13・13の変位結果に基づいて、球体13・13の中心I・Jの3次元座標X1・X2をそれぞれ算出する座標算出工程と、座標算出工程で算出した2個の3次元座標X1・X2に基づいて、ボルト12の中心Kの3軸並進量、及び、ボルト12の2軸回転量θ・φを算出するマウント軸変位算出工程とを備える。
(もっと読む)
膜濾過工程用現場検出分析装置
【課題】 膜濾過工程用現場検出分析装置の提供。
【解決手段】 本発明は光感知装置と駆動装置とデータ処理装置とを備えた膜濾過工程用現場検出分析装置開示する。前記光感知装置は線形の第一アレイに配列される複数の感知素子を含有して、線形の位置にケーキ層の厚み変化に関する信号を検出する。前記駆動装置は前記光感知装置は少なくとも一つの局部平面にケーキ層の厚み変化を検出できるように、前記ケーキ層上に平行に前記濾材と前記光感知装置との相対的移動ことができるように前記光感知装置を駆動する。前記データ処理装置は前記光感知装置を接続し、前記光感知装置から検出され前記信号を連続的に処理と分析する、さらにすぐにこの膜濾過工程中に少なくとも一つの局部平面にケーキ層の厚み変化を算出する。
(もっと読む)
原料ヤードの原料山計測システム、原料ヤードの原料山計測方法、及びコンピュータプログラム
【課題】 原料ヤードにおける原料山の状態を従来よりも高精度に計測できるようにする。
【解決手段】 ブーム106aに取り付けられた2Dレーザ距離計101a、101bから原料山100にレーザ光を照射し、原料山100からの反射光を受光し、受光した反射光と、そのときのレーザ光の照射方向とから求められる原料山100の表面の座標を、IMU103及びGPSコンパス104で測定されるブーム106aの姿勢に基づいて変更し、変更した原料山100の表面の座標に基づいて、原料山100の3次元形状と、原料山100の体積とを計算し表示する。
(もっと読む)
板厚分布の測定方法
【課題】安価な2軸スライダーを用いて、高精度に(半)透明基板の板厚分布を測定する方法を提供する。
【解決手段】(半)透明基板の一方の面から光を入射し、表面と裏面の反射位置を検出して板厚を測定する変位センサ−を用いた板厚分布を測定する方法であって、変位センサーの周辺に少なくとも3個のセンサーを配置し、これらのセンサーは、変位センサーと(半)透明基板との位置関係を測定して、(半)透明基板に対する変位センサーの位置及び姿勢を一定に制御しながら(半)透明基板の板厚分布を測定する方法であり、半透明基板における測定においては、半透明基板に接した、液体層を介して板厚の測定を行う。
(もっと読む)
真空内処理装置
【課題】トップテーブルの小型化と、トップテーブル質量の軽量化を実現しつつ、かつ長尺の反射体を必要とせず真空試料室の小型化が可能な真空内処理装置ないし荷電粒子線装置を実現する。
【解決手段】測長に使用する一対の干渉計および反射体の両者が可動となるようステージを構成し、かつステージが持つ複数の移動軸のうち上記一対の干渉計および反射体によって測長が行われる方向とは交差する移動軸と平行な方向に対して、上記一対の干渉計および反射体が互いに対向する状態を保ったまま移動できるようにステージを構成する。
(もっと読む)
コンクリート製軌道の軌道狂い測定方法および測定装置
【課題】
コンクリート軌道表面の凹凸に影響され難くかつ段差等の軌道の急峻な位置変化に対して対応可能でかつ検測車両の走行状態で高低狂い、通り狂い等の測定を行うことができるコンクリート製軌道の軌道狂い測定方法および測定装置を提供することにある。
【解決手段】
この発明は、検測車両の走行状態におけるコンクリート製軌道の軌道狂い測定において、距離検出器から得られるデジタル値の測定信号の測定値に対してコンクリート表面の凹凸を除去する幅を設定したメディアンフィルタ処理を行い、メディアンフィルタ処理により得られた測定値に基づいてモノレールの軌道狂い量の算出を行うものである。
(もっと読む)
ロボットおよびロボットシステム
【課題】
本発明はロボットを複数台運用するロボットシステムに関する。
【解決手段】
第1のロボットは、物体の反射光強度を計測する計測部と、計測部により得られた計測結果を解析する演算部と、第1のロボットを移動させる駆動部と、を備える。第2のロボットは再帰性反射特性を有する複数のマーカを備え、第1のロボットの演算部は、計測部の計測結果に基づき第2のロボットの複数の前記マーカの位置を算出し、算出の結果に基づき第2のロボットの位置および姿勢を認識し、第2のロボットの位置および姿勢の認識の結果に基づき第1のロボットを移動させるためのパラメータを算出し、第1のロボットの駆動部は、パラメータに基づき第1のロボットを移動させる。
(もっと読む)
非接触変位計測装置
【課題】短時間で且つ容易にワークの変位量を検出可能な非接触変位計測装置を提供する。
【解決手段】非接触変位計測装置は、ワーク12を載置可能に構成された測定テーブル13と、ワーク12の変位量を計測する第1〜第3レーザプローブ35a〜35cと、Y軸に沿って測定テーブル13から相対移動可能に構成され、Z軸方向に広がり且つX軸方向の測定テーブル13の両端に端部を有するゲート形状を有する第1ゲート状駆動部14Aとを備える。第1〜第3レーザプローブ35a〜35cは、ワーク12に光を照射すると共にその光に基づく反射光を受光し且つその反射光に基づきワーク12の変位量を計測する。第1ゲート状駆動部14Aは、ワーク12に対して少なくとも2方向からの光を照射させるように第1〜第3レーザプローブ35a〜35cを配置可能に構成されている。
(もっと読む)
電子機器および制御方法
【課題】近接する物体の検出精度の向上を図ることが出来る電子機器を実現する。
【解決手段】検出距離チューニングプログラム200aによるチューニング処理は、本コンピュータ10の前にユーザが実際に存在している状態で実行される。このチューニング処理では、検出距離チューニングプログラム200aは、近接センサ25から放出される光の強度を変化させながら近接センサ25の出力信号を監視する。そして、検出距離チューニングプログラム200aは、この監視結果に基づいて、放出される光の強度を、現在のコンピュータ10とユーザとの間の距離に適した値に調整する。
(もっと読む)
161 - 180 / 644
[ Back to top ]