
Fターム[2F065QQ23]の内容
光学的手段による測長装置 (194,290) | 信号処理 (28,761) | 信号の記憶 (4,476)
Fターム[2F065QQ23]の下位に属するFターム
画像の (2,813)
Fターム[2F065QQ23]に分類される特許
1 - 20 / 1,663
三次元座標測定装置、三次元座標測定方法、及びプログラム
コイルばね計測装置
表面処理状況モニタリング装置
基板の凹部の検査方法および基板のレジスト膜の検査方法
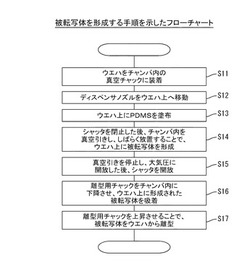
【課題】有底の凹部の状態を非破壊で検査し、製造コストを低減させる。
【解決手段】本発明のウエハ50のビア孔51の検査方法は、有底のビア孔51が表面に形成されたウエハ50に被転写材料を塗布し、この被転写材料をビア孔51内に充填させ、被転写材料を硬化させた後、ウエハ50から離型させることでビア孔51がビア像71として転写されてなる被転写体70を形成する転写工程と、ビア像71の表面を観察することでその表面形状の画像データを作成する表面観察工程と、ビア像71の画像データに基づいてビア像71の形状を評価し、ビア孔51内の状態を検査する検査工程とを備えたところに特徴を有する。
(もっと読む)
物品配列検査方法および物品配列検査装置

【課題】整列状態にあることが要求される物品の列について、整列状態を乱す物品の位置ずれ、欠落、倒れなどの種々の整列不良を検出することを可能とする。
【解決手段】物品の列が整列状態にあるかどうかを検査する方法であって、準備工程では、整列状態にある物品a1〜a4の列Paに対しその物品の列を列方向の全幅にわたって切断するような帯状の光Rを照射して各物品a1〜a4の表面に各物品の輪郭に沿う光切断線Lを生成するとともに、その光切断線Lを撮像して基準となる画像を取得する。検査工程では、検査対象の物品b1〜b4の列Pbに対し同じ帯状の光Rを照射するとともに、前記準備工程で撮像した光切断線の生成位置に対応する位置に生成された光切断線Lを撮像して検査対象画像を取得した後、その検査対象画像を前記基準となる画像と照合して、検査対象の物品b1〜b4の列Pbが整列状態にあるかどうかを判別する。
(もっと読む)
レーザ照射位置の補正方法、及び、レーザ加工装置
【課題】レーザ加工装置の出荷後再立ち上げにおけるレーザ照射位置の精度の悪化に対して、簡単な測定で精度悪化の傾向を定量把握して最終的に精度の高い補正を行うことが可能とするレーザ照射位置の補正方法が求められていた。
【解決手段】複数の加工エリアに分けて加工を行うレーザ加工装置において、加工エリアごとに対角線上に等間隔に並ぶ試験加工点を複数ヶ所設定し、予め設定された第一の補正データに基づく補正を施して試験加工点を加工するステップと、試験加工点の実際に加工された位置を測定するステップと、加工しようとする位置と実際に加工された位置の平面上のズレ量を直交する二軸で算出するステップと、加工エリアごとに、ズレ量のシフト成分と傾き成分を二軸ごとに算出するステップと、シフト成分と傾き成分をキャンセルするように算出された各加工エリアごとの補正情報を第一の補正データに加味し第二の補正データとする。
(もっと読む)
表面検査装置、表面検査方法、および露光システム
【課題】露光時の走査方向の違いによって生じるスキャン精度の差異を求めることが可能
な表面検査装置を提供する。
【解決手段】露光によって作製されたパターンを有するウェハを照明光で照明する照明系
20と、パターンで反射した照明光を検出する受光系30および撮像装置35と、撮像装
置35により撮像されたウェハの回折画像からパターンの線幅を求め、走査方向によるパ
ターンの線幅の差を求める検査部42とを備えている。
(もっと読む)
検出装置、画像形成装置及びプログラム
【課題】保持部材の第1の方向のたわみを検出する。
【解決手段】第1のイメージセンサは、中間転写ベルトの裏面に形成されたラダーパターンチャートの濃度を測定する。記憶部は、第1のイメージセンサと中間転写ベルトの裏面との間の距離と、この第1のイメージセンサの測定に係るラダーパターンチャートのコントラストとの対応関係を示す第1の関数を記憶する。制御部は、第1のイメージセンサにより測定されたラダーパターンチャートの濃度を用いて、ラダーパターンチャートにおいて隣り合う白領域と黒領域とのコントラストを算出する。制御部は、記憶部に記憶された第1の関数を用いて、算出されたコントラストに対応する距離を特定し、特定した距離を上述した白領域及び黒領域と中間転写ベルトの裏面との間の距離として用いて、中間転写ベルトの幅方向のたわみを検出する。
(もっと読む)
リアルタイムコンテキスト生成機能を含むマシンビジョンシステムプログラム編集環境
【課題】リアルタイムコンテキスト生成機能を含むマシンビジョンシステムプログラム編集環境を提供する。
【解決手段】編集に現実的なコンテキストを生成するために、パートプログラムのすべての先行命令の実行を必要とせずに、前に保存されたデータを使用する代理データ動作が、特定の命令セットの実行に取って代わる。代理データは、パートプログラムに記録される動作の実際の実行中に保存し得る。実行の編集モードは、そのデータを代理と置換して、そのデータを生成するであろう動作を実行する。コンテキスト生成で大量の時間節約を達成し得、それにより、編集は動作コンテキスト内で行うことができ、動作コンテキストは略リアルタイムで正確性のために繰り返しリフレッシュし得る。これは、マシンビジョンシステムの固有のユーザインタフェースを使用して、比較的未熟なユーザによる都合のよいプログラム変更をサポートする。
(もっと読む)
情報処理装置、情報処理方法
【課題】撮像装置や現実物体に装着された姿勢センサの校正を、簡便かつ正確に行う為の技術を提供する。
【解決手段】姿勢計測値取得部145は、撮像装置120に装着された姿勢センサ110による姿勢計測値、現実物体125に装着されたセンサ115による姿勢計測値を取得する。画像処理部135は、現実物体125上に配置された指標の撮像画像上における画像座標を取得する。校正部160は、撮像装置120に対するセンサ110の配置情報、現実物体125に対するセンサ115の配置情報、のうち少なくとも1つを、上記2つの姿勢計測値、画像座標を用いて求める。
(もっと読む)
膜厚測定装置
【課題】作業者に負担をかけることなく、比較的安価な構成で透明で且つ膜厚が薄い紙材料からなる印刷物の膜厚測定を正確に行うことができる膜厚測定装置を提供する。
【解決手段】膜厚測定装置1は、大略、光源2、受光サンサ3及び受光センサ3と電気的に接続された演算処理部4を備えてなり、紙材料からなる基材6上に形成された塗布膜8の表面に所定波長の光を出射し、該塗布膜8から反射した反射光の光量、すなわち電圧を測定し、塗布膜8の厚みに対応する電圧と塗布材の膜厚とが関連付けられた検量線に基づき膜厚を演算する。光源2として波長が570nm〜592nmにピークを有する光を用いると共に、塗布膜8に入射する入射光と該入射光の入射点における塗布膜8に垂直な仮想垂線14とでなす角度を0度〜10度としたので、透明で且つ膜厚が0.5μm〜2.0μm以下の印刷物を測定した場合でも、正確な膜厚の値を得ることができる。
(もっと読む)
目標位置検出装置、該検出装置に用いられる目標位置検出方法及び目標位置検出プログラム
【課題】夜間でも複数の目標対象物の捜索が可能な目標位置検出装置を提供する。
【解決手段】目標対象物位置特定手段(画像処理・座標演算装置21)により、画像記録部33に記録されている赤外画像iu、及びデータ記録部34に記録されているGPS/姿勢データfdが解析され、発熱物体が存在する位置が目標対象物の位置として特定される。この場合、画像処理・座標演算装置21により、赤外画像iu及びGPS/姿勢データfdに基づいて、各赤外画像iu上の発熱物体の座標位置を、赤外カメラ13の位置を基準とする方位ベクトル線に対応付けることにより、発熱物体に対して時系列の方位ベクトル線群が生成され、方位ベクトル線群を構成する各方位ベクトル線の共通部分が目標対象物の絶対座標(緯度、経度、及び高さ)として特定されて対象地点座標データedが出力される。
(もっと読む)
タイヤ厚み測定装置
【課題】内圧を負荷した状態でタイヤの厚みを計測可能なタイヤ厚み測定装置を提供する。
【解決手段】上側ハーフリム84でタイヤ30の一方のビード部を支持し、下側ハーフリム26で他方のビード部を支持し、タイヤ内を密閉して内圧をかける。内側レーザー変位計66から外側レーザー変位計122までの距離からタイヤ内空部に配置した内側レーザー変位計66で計測したタイヤ内面までの距離とタイヤ外側に配置した外側レーザー変位計122で計測したタイヤ外面までの距離とを引き算する。これにより、内圧を負荷した状態でタイヤの厚みを計測することが出来る。
(もっと読む)
計測装置
【課題】簡易な構成で広い計測レンジと高い計測精度とを実現した計測装置を提供する。
【解決手段】計測装置は、第1光源、第2光源、第1検出器、第2検出器及び算出部を備える。第1光源は第1波長と第2波長との間で波長が走査された走査区間を含む第1光を生成する。第2光源は第3波長の第2光を生成する。第1検出器は第1光を参照面及び被検面に各々照射することで生成された第1干渉縞を検出する。第2検出器は第2光を参照面及び被検面に各々照射することで生成された第2干渉縞を検出する。第3波長は第1波長及び第2波長の合成波長より短い。算出部は第1時刻において第2干渉縞の位相のデータから第2干渉縞の次数が算出できなくなった場合に、第1時刻より後の走査区間における第1干渉縞の位相の変化に基づいて第1時刻以降における第2干渉縞の次数を算出し、該算出された第2干渉縞の次数を用いて第1時刻以降における被検面の形状を算出する。
(もっと読む)
バリ取り方法
【課題】より適切なバリ取りを行うことができるバリ取り方法を提供する。
【解決手段】バリ取り方法は、ワーク上のバリの形状を計測する計測工程(S1、S2)と、計測工程で得られた計測値に基づき、バリの長さ方向に沿って所定の根元算出点における両側の根元位置を算出する根元算出工程(S3〜S11)と、根元算出工程で得られた根元位置に基づいてバリ取り工具の軌道を算出する軌道算出工程と、軌道算出工程で得られた軌道に従ってバリ取り工具を移動させながらバリ取り加工を行うバリ取り工程とを備える。
(もっと読む)
回折構造体、広帯域、偏光、エリプソメトリおよび下地構造の測定
【課題】高感度の分光散乱計を提供する。
【解決手段】半導体ウェハ上の回折構造体からの回折の前に、必要な場合は、分光反射率計または分光エリプソメータを使って構造体の下に位置する膜の膜厚と屈折率とをまず測定する。そして、厳密なモデルを使って回折構造体の強度またはエリプソメトリックな署名を計算する。次に、偏光放射線および広帯域放射線を用いた分光散乱計を使って回折構造体を測定して回折構造体の強度またはエリプソメトリックな署名を得る。この署名をデータベース内の署名と適合させて構造体の格子型パラメータを判定する。
(もっと読む)
画像処理装置および画像処理プログラム
【課題】画像から所望の領域を容易に抽出可能な画像処理装置および画像処理プログラムを提供する。
【解決手段】画像データに基づく初期画像IMが表示部260に表示される。使用者が初期画像IMにおいて抽出すべき領域を含む抽出範囲を指定することにより、抽出範囲内で設定された抽出条件に基づいて一または複数の領域が抽出される。抽出された一または複数の領域から、領域に関する特徴情報に基づいて特徴領域が選択される。選択された特徴領域が抽出領域として決定される。使用者が初期画像IMにおいて抽出すべき他の領域を含む抽出範囲を指定することにより、抽出範囲内で設定された抽出条件に基づいて一または複数の領域が抽出される。抽出された一または複数の領域から、領域に関する特徴情報に基づいて特徴領域が選択される。選択された特徴領域は、既に決定された抽出領域に加えられる。
(もっと読む)
平面度測定方法
【課題】測定対象物の表面の平面度を精度良く求めることができる平面度測定方法を提供する。
【解決手段】平面度測定方法は、レーザ変位計を含むレーザ測定装置が、レーザ光を走査しながら、複数の位置における前記測定対象物の表面と測定基準面とする液面との間の、前記レーザ光の照射方向における距離の情報を測定して取り込む。この後、前記レーザ変位計が測定した複数の位置における前記距離の情報と、前記レーザ変位計が走査した前記複数の位置の位置情報をコンピュータが取り込む。前記コンピュータは、測定した前記位置それぞれにおける前記位置情報と前記距離の情報を座標として表した測定データを、座標空間上の点で表したとき、前記点すべてが2つの平行平面の間に挟まれ、かつ前記2つの平行平面の間の距離が最小となる目標平行平面を、前記2つの平行平面の傾きを変えながら探索することにより、前記平面度を算出する。
(もっと読む)
回転式レーザー測定装置
【課題】コンクリート壁等測定対象面の状態(凹凸量)を装置により自動的に、かつ精度良く測定できるようにする。
【解決手段】回転式レーザー測定装置は、レーザー光によって距離を測定する距離センサと、該距離センサを軸方向に駆動する第1の駆動手段と、同距離センサを軸周り方向に駆動する第2の駆動手段と、これら第1,第2の駆動手段を駆動制御する駆動制御手段とを備え、上記距離センサを測定対象面の長手方向と直交する面に沿って回転可能に支持するとともに、上記測定対象面の長手方向に沿って所定ピッチ毎に移動可能とし、該所定ピッチ毎に上記距離センサを移動させ、かつ所定の角度回転させながら、測定対象面の状態を自動的に測定して行くようにした。このような構成によると、自動的かつ容易に、しかも正確に凹凸その他の表面状態を測定して行くことができるようになる。
(もっと読む)
画像処理装置、画像処理方法、プログラム、および画像処理システム
【課題】画像解析の処理負荷および精度を改善するための画像処理装置、画像処理方法、プログラム、および画像処理システムを提供する。
【解決手段】距離画像センサにより取得される対象空間における各位置の距離が表現された距離画像の解析結果に基づき、前記対象空間を撮像する撮像装置により取得される撮像画像から注目領域を決定する注目領域決定部と、前記注目領域決定部により決定された前記注目領域を画像解析する画像解析部と、を備える画像処理装置。
(もっと読む)
1 - 20 / 1,663
[ Back to top ]