
Fターム[2F065QQ24]の内容
光学的手段による測長装置 (194,290) | 信号処理 (28,761) | 信号の記憶 (4,476) | 画像の (2,813)
Fターム[2F065QQ24]に分類される特許
21 - 40 / 2,813
表面欠陥検査方法及び表面欠陥検査装置
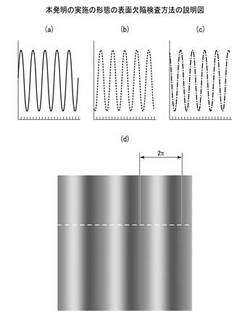
【課題】 表面欠陥検査方法及び表面欠陥検査装置に関し、欠陥検査の検知精度の向上を図るために位相シフトを用いつつ検査時間を低減する。
【解決手段】 互いに異なった複数の波長をそれぞれ独立に変調した明暗パターンをパターン平面上で互いに変調させて合成照明パターンを合成し、前記合成した合成照明パターンを検査対象物に照射し、前記検査対象物からの前記合成照明パターンの反射パターンを撮像して波長毎の画像を一括して取得し、前記撮像した画像を波長毎に分解して前記検査対象物の表面の凹凸欠陥を判別する。
(もっと読む)
電子機器

【課題】所定領域内の状況を適切に把握することが可能な電子機器を提供する。
【解決手段】電子機器は、第1の所定領域にある第1物体を撮像する第1撮像部130又は30と、前記第1撮像部が撮像した前記第1物体の面積に関する量を検出する検出部42とを備え、前記第1物体の面積に関する量に基づいて第1の所定領域内の状況を把握する。さらに、第2の所定領域にある第2の物体を撮像する第2撮像部30又は130とを備え、前記検出部は前記第2撮像部が撮像した前記第2物体の面積に関する量を検出する。
(もっと読む)
ステレオ3次元計測装置
【課題】回路規模および演算時間の増大を招くことなくキャリブレーションずれを再補正する。
【解決手段】キャリブレーションによって補正された左右のカメラステレオ平行化後画像間のずれ量を、キャリブレーションずれ再補正部15を含む対応点探索部9による対応点の探索処理中において、キャリブレーションずれ再補正部15によるキャリブレーションずれ再補正処理で得られるデータを用いて再補正する。こうして、距離計測装置1における内部ハードウェアの回路規模および演算時間を増大させることなく計測精度を高めることができる。また、上記右カメラステレオ平行化後画像を上下にずらして、左右のカメラステレオ平行化後画像の上下方向のずれを再補正する。こうして、問題になり易い上下方向のキャリブレーションずれを低減することができる。その際に、対応点の探索を行う際の右カメラステレオ平行化後画像の最適位置を確実に見出すことができる。
(もっと読む)
3次元計測装置およびそれに用いられる照明装置
【課題】被計測物を精度よく計測することができる3次元計測装置およびそれに用いられる照明装置を提供する。
【解決手段】3次元計測装置1は、被計測物8に円偏光を照射する照明手段2と、照明手段2を移動させる移動手段3とを備える。また、3次元計測装置1は、被計測物8の被照射面からの反射光を受けて上記被照射面を撮像する撮像手段4と、撮像手段4で撮像された撮像画像を用いて反射光の偏光状態を検出し、被計測物8の被照射面の向きを求める演算手段5とをさらに備える。照明手段2は、円偏光を被計測物8の一部に照射する。移動手段3は、被計測物8において被照射面の位置が変わるように照明手段2を移動させる。
(もっと読む)
対象検出装置および対象検出方法
【課題】より広範囲かつ高速に対象を検出することが可能な対象検出装置および対象検出方法を提供する。
【解決手段】対象検出装置101は、検出対象の物性に応じて予め選択された複数の波長帯について、2次元画像を撮像するための撮像部11と、2次元画像の各画素における物質を検出するための検出部12とを備え、撮像部11は、設定されたラインごとに2次元画像を撮像する。
(もっと読む)
物品配列検査方法および物品配列検査装置
【課題】整列状態にあることが要求される物品の列について、整列状態を乱す物品の位置ずれ、欠落、倒れなどの種々の整列不良を検出することを可能とする。
【解決手段】物品の列が整列状態にあるかどうかを検査する方法であって、準備工程では、整列状態にある物品a1〜a4の列Paに対しその物品の列を列方向の全幅にわたって切断するような帯状の光Rを照射して各物品a1〜a4の表面に各物品の輪郭に沿う光切断線Lを生成するとともに、その光切断線Lを撮像して基準となる画像を取得する。検査工程では、検査対象の物品b1〜b4の列Pbに対し同じ帯状の光Rを照射するとともに、前記準備工程で撮像した光切断線の生成位置に対応する位置に生成された光切断線Lを撮像して検査対象画像を取得した後、その検査対象画像を前記基準となる画像と照合して、検査対象の物品b1〜b4の列Pbが整列状態にあるかどうかを判別する。
(もっと読む)
半田位置解析装置、基板外観検査装置、半田位置解析方法および半田位置解析プログラム
【課題】部品の端子が接続されない基板上の半田の位置を取得することができる技術の提供。
【解決手段】基板上の半田の印刷位置を取得し、部品の端子が接続される前記基板上の半田の位置である接続位置を取得し、前記印刷位置から前記接続位置を除外した位置を前記部品の端子が接続されない基板上の半田の位置である非接続位置として取得する。
(もっと読む)
変位測定方法および変位測定装置
【課題】特異な輝度を持つ画素に影響されない重心位置算出を行い、変位測定の精度を向上する変位測定方法および変位測定装置を得る。
【解決手段】計測対象1にスリット光3を照射するスリット光照射装置2と、スリット光3を計測対象1に照射することによって生成される光切断線4を撮影するカメラ5と、カメラ5により得られた光切断線像から計測対象1の変位を求める画像処理装置7と、を備え、画像処理装置7は、カメラ5により得られた光切断線像の重心位置演算方向の各画素の輝度を最小二乗法で理想的な輝度分布に近似させた後、さらに輝度値と近似値の差分を用いて重み付き最小二乗法で理想的な輝度分布に再近似させ、その分布の期待値から光切断線像の重心位置を算出して計測対象1の変位を求める。
(もっと読む)
画像解析装置及びこれを用いた物体検出装置
【課題】対象物体上の外表面形状によらず、対象物体までの距離を利用した適正な制御や処理を実現することを課題とする。
【解決手段】自動車に搭載された2つのカメラ10A,10Bで自車両周囲の撮像領域を撮像して得られる複数の撮像画像を解析して対象物体までの距離を算出する際、撮像領域に向けて互いに異なる方向から非可視光を照射する2つの光照射部21,22の光照射時期が互いに重複しないように交互に非可視光を照射し、当該非可視光の照射によって対象物体の外表面に生じる非可視光の照射領域と非照射領域との境界線C1,C2上の同一の地点を映し出す対応点を光照射時期ごとにそれぞれ特定し、光照射時期ごとに、対応点のズレ量に基づいて距離を算出する。
(もっと読む)
情報端末装置
【課題】簡素且つ高精度に撮像対象の大きさを推定して、その大きさに応じて表示情報の制御を行うことのできる情報端末装置を提供する。
【解決手段】撮像部2と、撮像対象の大きさを推定する推定部3と、情報を表示する表示部6と、表示部6で表示する情報を記憶する記憶部5と、推定された大きさに関連する情報を記憶部5から読み出して制御する制御部4とを備え、推定部3が、撮像対象の一面上に設けられた大きさ及び形状が既知のタグを検出するタグ検出部と、タグの周囲に形成される撮像対象の領域を抽出する領域抽出部と、検出タグの配置とタグの所定配置との比較に基づいて、検出タグの撮像部2に対する姿勢を推定する姿勢推定部と、推定姿勢に基づいて抽出された撮像対象の一面の大きさと、その一面を除外した奥行き部分の大きさとを推定するサイズ推定部とを含むよう情報端末装置1を提供する。
(もっと読む)
画像処理装置、画像処理方法及び画像処理プログラム
【課題】様々な位置姿勢や形状のワークに対応可能で、かつ、迅速に最大内接円を抽出可能な画像処理装置、画像処理方法及び画像処理プログラムを提供すること。
【解決手段】撮像部2によりワークWが撮像された元画像を取得する元画像抽出部31と、元画像抽出部31により取得された元画像を2値化して、元画像からワークWの概略領域を特定する領域特定部32と、領域特定部32手段により特定された概略領域を所定回数収縮処理する収縮処理部34と、元画像抽出部31により取得された元画像からワークWの輪郭線を抽出する輪郭線抽出部35と、輪郭線抽出部35により抽出されたワークWの輪郭線と収縮処理部34により収縮処理された収縮領域とを合成し、収縮領域の領域内で輪郭線に内接する最大内接円の中心点を探索して、中心点を中心としたワークWの内接円を抽出する最大内接円選定部36と、を備えた。
(もっと読む)
積層ゴムの検査装置及び積層ゴム
【課題】積層ゴムの水平変位量及び回転量を同時に測定する。
【解決手段】上部部材と下部部材に固定され、水平方向に変位される積層ゴム10の外周部に周方向へ複数設けられたマーキングを異なる角度から同時に撮像する複数の撮像手段34A,34Bと、前記撮像手段34A,34Bによって撮像された画像上の前記マーキングの座標を算出する座標算出手段と、異なる撮像手段34A,34Bによって同時に撮像された複数の画像上の前記マーキングの移動量から、積層ゴム10の水平変位量及び中心軸周りの回転量を演算する演算手段46と、を有する。
(もっと読む)
画像取得動作の連続ストリームが実行モード中に実行されるパートプログラムのマシンビジョンシステム編集環境
【課題】画像取得動作の連続ストリームが実行モード中に実行されるパートプログラムのマシンビジョンシステム編集環境を提供する。
【解決手段】画像取得動作の連続ストリームが実行モード中に実行されるパートプログラムのためのマシンビジョンシステム編集環境が提供される。一形態では、新しい共通シンタックス及び表現が利用され、2つのステージで実行されるパートプログラムを実行し、そのような連続画像取得動作が通常動作と同じ方法で記録される。最初のステージでは、画像取得の連続ストリームを持つパートプログラムの一部が画像取得動作のためにスキャンされ、画像取得プロセスが開始された後に、画像を取得するために最も効果的な命令が決定される。そして、第2のステージでは、画像取得プロセスが実行されている間に、パートプログラムの一部が再度スキャンされ、そして画像解析動作が実行される。
(もっと読む)
三次元計測装置
【課題】位相シフト法を利用した三次元計測を行うにあたり、より高精度な計測を実現することのできる三次元計測装置を提供する。
【解決手段】基板検査装置1は、プリント基板2に対し縞状の光パターンを照射する照射装置4A,4Bと、これを撮像するカメラ5と、撮像された画像データを基に三次元計測を行う制御装置6とを備えている。制御装置6は、第1照射装置4Aから第1光パターンを照射して得られた画像データを基に第1計測値を取得し、第2照射装置4Bから第2光パターンを照射して得られた画像データを基に第2計測値を取得する。そして、両光パターンが照射される全照射領域に関しては、両計測値から特定される値を当該領域の高さデータとし、いずれか一方のみ照射される一部照射領域に関しては、前記全照射領域の高さデータから算出した補完データを基に当該領域に係る計測値の縞次数を特定し、当該領域に係る高さデータを取得する。
(もっと読む)
半導体基板の欠陥検査装置および半導体装置の製造方法
【課題】半導体基板の欠陥検査において、高精度かつ効率的に、可視光透過性を有する半導体基板の表裏面への焦点位置合せを行うこと。
【解決手段】
半導体基板の欠陥検査装置は、焦点位置合わせマークが表面に形成された可動ステージと、可視光を可動ステージに向けて照射する光源と、可動ステージに対向して設けられた対物レンズと、対物レンズが結像した画像を電気信号に変換する光電変換素子と、焦点位置合わせマークの可動ステージ上の位置および被検査物となる半導体基板の厚さが登録され、可動ステージと対物レンズの位置関係を制御する制御装置を備えている。制御装置は、登録された焦点位置合わせマークを基準にして半導体基板の裏面側の焦点位置合わせを行い、登録された半導体基板の厚さを基準にして半導体基板の表面側の焦点位置合わせを行う。
(もっと読む)
端末装置、画像処理方法、及びプログラム
【課題】画像データに対する計測記録データを容易に作成することができる端末装置、画像処理方法、及びプログラムを提供する。
【解決手段】記憶部140は、画像データ内の第1座標範囲と、第1座標範囲に関する第1計測値データと、が関連付けられた第1画像データを保持する。制御部150は、第2画像データ内の第2座標範囲をユーザの指定に応じて取得する。解析部160は、第1座標範囲の画像パターンと第2座標範囲の画像パターンを比較し、比較結果及び第1計測値データに基づいて、第2座標範囲に関する第2計測値データを算出する。
(もっと読む)
リアルタイムコンテキスト生成機能を含むマシンビジョンシステムプログラム編集環境
【課題】リアルタイムコンテキスト生成機能を含むマシンビジョンシステムプログラム編集環境を提供する。
【解決手段】編集に現実的なコンテキストを生成するために、パートプログラムのすべての先行命令の実行を必要とせずに、前に保存されたデータを使用する代理データ動作が、特定の命令セットの実行に取って代わる。代理データは、パートプログラムに記録される動作の実際の実行中に保存し得る。実行の編集モードは、そのデータを代理と置換して、そのデータを生成するであろう動作を実行する。コンテキスト生成で大量の時間節約を達成し得、それにより、編集は動作コンテキスト内で行うことができ、動作コンテキストは略リアルタイムで正確性のために繰り返しリフレッシュし得る。これは、マシンビジョンシステムの固有のユーザインタフェースを使用して、比較的未熟なユーザによる都合のよいプログラム変更をサポートする。
(もっと読む)
形状測定装置、構造物製造システム、構造物製造方法
【課題】計測精度を向上する。
【解決手段】形状測定装置は、光源からの光に照らされている被検物を撮像する撮像素子と、撮像素子の受光面(A17)と共役な共役面(A0)を受光面と非平行になるように形成する結像光学系と、撮像素子による撮像の結果から光に照らされている部分の像の位置を検出することにより、被検物の形状に関する情報を取得する形状情報取得部と、を備える。結像光学系は、像を形成する光束が通る範囲において、受光面を含む面と共役面を含む面との交線に直交する直交面上の像面の略中心と物体面の略中心とを直線で結んだときの軸に関して断面形状が非対称であり、かつ交線から最も遠い部分と、交線から最も近い部分とについて、遠い部分から近い部分に向うにつれて直交面上の断面形状の寸法が縮小又は拡大するレンズ要素(52、53)を含むレンズ群(50)を有する。
(もっと読む)
検出装置、画像形成装置及びプログラム
【課題】保持部材の第1の方向のたわみを検出する。
【解決手段】第1のイメージセンサは、中間転写ベルトの裏面に形成されたラダーパターンチャートの濃度を測定する。記憶部は、第1のイメージセンサと中間転写ベルトの裏面との間の距離と、この第1のイメージセンサの測定に係るラダーパターンチャートのコントラストとの対応関係を示す第1の関数を記憶する。制御部は、第1のイメージセンサにより測定されたラダーパターンチャートの濃度を用いて、ラダーパターンチャートにおいて隣り合う白領域と黒領域とのコントラストを算出する。制御部は、記憶部に記憶された第1の関数を用いて、算出されたコントラストに対応する距離を特定し、特定した距離を上述した白領域及び黒領域と中間転写ベルトの裏面との間の距離として用いて、中間転写ベルトの幅方向のたわみを検出する。
(もっと読む)
単眼カメラ画像によるステレオ視に基づく運動量推定方法、及び当該方法を使用する運動量推定装置
【課題】単眼ステレオ視に基づく運動量推定を実施するに当たり、演算負荷を軽減しつつ、運動量及び三次元座標を高精度に算出する方法を提供する。
【解決手段】単眼カメラによって撮像された画像を用いるステレオ視に基づく運動量推定を行うに当たり、個々のオプティカルフローの向きを考慮して、異なる向きを有するオプティカルフローを形成する特徴点を効率的にサンプリングして基礎行列の算出に用いる。具体的には、基礎行列の算出に用いるオプティカルフローを形成する特徴点のサンプリングにおいて、サンプリングされた特徴点をオプティカルフローの向きに基づいて所定数のグループに振り分け、複数の特徴点が振り分けられたグループについては特徴点を1つに収束させ、特徴点が振り分けられなかったグループについては改めて特徴点を選択する処理を繰り返して、全てのグループに特徴点が1個ずつ属する状態とし、これらの特徴点に基づいて基礎行列を算出する。
(もっと読む)
21 - 40 / 2,813
[ Back to top ]