
Fターム[2F065QQ24]の内容
光学的手段による測長装置 (194,290) | 信号処理 (28,761) | 信号の記憶 (4,476) | 画像の (2,813)
Fターム[2F065QQ24]に分類される特許
161 - 180 / 2,813
3次元相対座標計測装置およびその方法
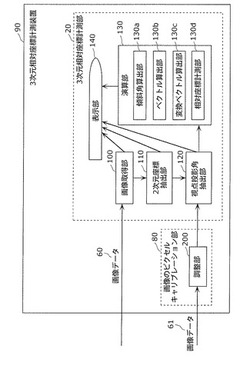
【課題】撮影点におけるカメラの位置および姿勢を事前に把握することなく相対座標を計測することができる3次元相対座標計測装置を提供する。
【解決手段】3次元相対座標計測装置90は、第1の視点より3点の基準点が撮像装置で撮像された第1の取得画像を取得する画像取得部100と、各画素に対する画素視点投影角の情報を保持し、情報を用いて、第1の取得画像に投影される3点の基準点に対応する画素視点投影角である3つの第1の基準視点投影角を取得する視点投影角抽出部120と、3つの第1の基準視点投影角と3点の基準点の相対座標とを用いて、第1の取得画像の撮像面である第1の撮像面と3点の基準点を含む基準平面とのなす第1の傾斜角を算出する傾斜角算出部130aと、第1の傾斜角を用いて、3点の基準点のいずれかと対象点との相対座標を計測する相対座標計測部130dとを備える。
(もっと読む)
タイヤ状態検出方法及び装置

【課題】タイヤのスリップ角とキャンバー角を同時に効率よく測定でき、かつタイヤの交換を容易に行うことができるタイヤ状態検出方法及び装置を提供する。
【解決手段】撮像カメラ16で撮像した角度検出用回転体14の画像データを基にタイヤ1204のキャンバー角αを求め、さらに、撮像カメラ16で撮像した走行路面28の画像データと角度検出用回転体14の画像データを基にタイヤ1204のスリップ角βを求める構成にした。
(もっと読む)
鉄筋領域抽出装置、鉄筋領域抽出方法及び鉄筋領域抽出プログラム
【課題】簡単に精度よく鉄筋の配筋情報を取得する。
【解決手段】配筋情報取得システム1において、携帯端末4は、背景バーBの部分に相当する画像全体から、マーカMK1及びMK2を検出する(S901)。次に、マーカMK1と、MK2との間にある画像を切り出す(S902)。その画像において、鉄筋の軸方向に垂直な方向で、ピクセルの輝度が不連続な箇所を検出することにより、領域の境界線となるエッジを抽出する(S903)。続いて、抽出されたエッジのうち、不要なエッジを除去する(S904)。次に、画像の輝度分布に対して度数分布を作成し、その度数分布に基づいて鉄筋、影、背景の3つの領域における代表輝度値を計算し、各代表輝度値を用いて、各エッジに挟まれた領域をいずれかに特定する(S905)。さらに、特定した領域のうち、エッジを挟んで隣り合う領域が同じである場合、その2つの領域を1つの領域として統合する(S906)。
(もっと読む)
溶接位置の検査方法及びその装置
【課題】
簡単な構成を用いて検査範囲の照度を均一化して検査領域を広範囲とし、溶接部の円形輪郭の全周を抽出し高精度に溶接部の位置を検出することで、所望の位置に溶接が施されているかを検査すること。
【解決手段】
本発明は、上記課題を解決するために、検査対象表面の2次元検査領域に対して傾斜した角度で異なる少なくとも2方向から前記2次元検査領域を照明すると共に、該2次元検査領域に対向した位置から前記異なる少なくとも2方向から照明された複数の画像を取得し、該複数の取得した画像から溶接部のくぼみ傾斜部分に対応する輪郭情報をそれぞれ抽出し、該抽出した複数の輪郭情報を合成することで円形の輪郭を得、該円形の輪郭に円を当てはめて前記溶接部として認識し、該溶接部として認識した円の中心座標を溶接位置とすることを特徴とする。
(もっと読む)
測定装置
【課題】入遮光位置の測定精度を高める。
【解決手段】検出光を出射する投光素子62と、前記投光素子62と対向配置されたイメージセンサ85と、前記イメージセンサ85から受光信号を読み出す信号読出回路90と、前記受光信号のレベルと所定の基準レベルとを比較し、被検出物が前記検出領域を通過した際に、前記受光信号のレベルが基準レベル以上から前記基準レベル以下に、あるいは前記基準レベル以下から前記基準レベル以上に変化する入遮光位置を測定して出力する測定回路120とを備え、前記信号読出回路90と前記測定回路120の間に、前記信号読出回路90で読み出される受光信号波形から所定周波数の信号成分を除去する第一フィルタ回路100を備える。
(もっと読む)
測定装置
【課題】内径の異なる種々の穴形状を精度良く測定できる測定装置を提供すること。
【解決手段】被測定領域の少なくとも一部の面の法線方向とは異なる方向から前記被測定領域に照明光を照射することで被測定領域に帯状の照明領域を形成する照明系と、前記照明系による照射方向と前記帯状の照明領域における長手方向等を含む面からはずれた位置から照明領域の散乱光を受光する受光系と、受光系の受光結果に基づいて被検面の形状を算出する演算部と、を備える。
(もっと読む)
変位量特定装置、変位量特定方法および変位量特定プログラム
【課題】基板の反りを簡易に検出することができる技術の提供。
【解決手段】電子部品を基板に実装するためのパッドの中から前記基板の反りを検出するための基準パッドを選択し、前記基板に反りが発生していない場合の前記基板の表面である基準平面に対して傾斜した方向に光軸が配向したカメラによって撮影された前記基準パッドの像を含む画像を取得し、前記基準パッドの像の前記画像内での位置と前記基板に反りが発生していない場合における前記基準パッドの像の前記画像内での位置である基準位置とに基づいて前記基準平面に垂直な方向への前記基板の反りの量を特定する。
(もっと読む)
寸法測定装置、寸法測定方法および寸法測定プログラム
【課題】対象物の寸法を簡易かつ高精度に測定する寸法測定装置を提供する。
【解決手段】寸法測定装置は、取得部18aと、登録部18bと、表示制御部18cと、寸法算出部18eとを備える。取得部は、撮像部14により撮像される対象物と自装置とが接触した状態における撮像部の傾斜である接触傾斜を取得する。登録部は、撮像部により対象物の画像が撮像される際に、撮像部から対象物までの距離と撮像部の傾斜とを取得し、取得した距離および傾斜を対象物の画像ごとに対応付けて画像情報記憶部17bに登録する。表示制御部は、接触傾斜に対応する対象物の画像および距離を画像情報記憶部から抽出し、抽出された対象物の画像とともに対象物の画像に重畳される一対の枠を表示部12に表示させる。寸法算出部は、表示制御部により表示部に表示された枠の表示位置および接触傾斜に対応する距離に基づいて対象物の寸法を算出する。
(もっと読む)
ディンプル位置検出装置
【課題】ディンプル頂点の位置を正確に検出することができるディンプル位置検出装置を提供する。
【解決手段】ロードビームに形成されたディンプルの位置を検出するためのディンプル位置検出装置であって、ディンプルに向けて光を照射する照明装置と、その反射光を受光する撮像装置と、得られた画像を二値化する画像処理部とを備えている。画像処理部は、二値化レベルを最大にする手段S2と、反射光の画像を二値化する手段S3と、二値化レベルを超えた光点領域(オン領域)の面積が所定値であるか否かを判定する手段S4と、光点領域の面積が所定値未満のときに二値化レベルを下げる手段S6と、光点領域の面積が所定値に達したときに光点領域の重心の位置を算出する手段S8とを具備している。
(もっと読む)
走行体の停止位置検出方法、及び走行体の停止位置検出装置
【課題】走行体の前面を斜めから撮像した場合であっても、走行体の先端部位置と基準停止位置とのズレ距離量を正確に求めることができ、走行体が基準停止位置に正確に停止しているか否かを確実に判定する。
【解決手段】走行体3の停止位置検出方法は、撮像手段により、走行体3が停止する位置として予め設定された基準停止位置PSと、この基準停止位置PSに対し上下方向又は左右方向にずれた場所に存在する走行体3の端部位置PFとが同時に写り込んだ撮像画像Fを取得するステップと、取得した撮像画像Fから、基準停止位置PSと走行体3の端部位置PFとの実空間における水平方向のズレ距離量を算出するステップと、得られたズレ距離量を基に、走行体3が基準停止位置PSに停止したか否かを判定するステップと、を有する。
(もっと読む)
ツインロータリ圧縮機の中間プレートの検査装置
【課題】単品状態および圧縮部に組み込まれた状態における分割面の隙間を測定することができるツインロータリ圧縮機の中間プレートの検査装置を提供する。
【解決手段】検査装置は、単品の中間プレート5の分割面同士を突き合わせるための右スライドシリンダ47a等、突き合わせられた分割面隙間Cを測定するためのLED光源27および画像センサ36、中間プレート5の外径を測定するためのリニアセンサ61等を具備する第一検査装置100と、組み込まれた状態の中間プレート5の分割面同士を突き合わせて、中間プレート5の外径を測定するための第二検査装置200と、第一検査装置100が測定した分割面隙間Cが無い状態における中間プレート5の外径である単体隙間合計値E5と、第二検査装置200が測定した中間プレート5の外径である組立隙間合計値E15とを比較する制御装置300と、を有する。
(もっと読む)
追尾装置及び追尾方法
【課題】顔部が非検出となったり、顔部の検出の精度が低下したりした場合であっても、以後のフレームにおける追尾精度を落とすことの無い追尾装置及び追尾方法を提供すること。
【解決手段】追尾対象の顔部を、顔検出回路1307を用いた追尾処理と、追尾処理回路1305による輝度情報を用いた追尾処理と、追尾処理回路1306による色情報を用いた追尾処理とによって追尾する。また、追尾対象の顔周辺部を、顔検出回路1307を用いた追尾処理によって検出された顔部の位置から推定して追尾するとともに、追尾処理回路1305による輝度情報を用いた追尾処理と、追尾処理回路1306による色情報を用いた追尾処理とによって追尾する。次フレームの追尾処理の開始の位置を顔検出回路1307における顔検出の結果と顔部信頼性向き判定回路1308における顔部の向きの判定結果に応じて変更する。
(もっと読む)
裁断対象検査装置、裁断対象検査方法、裁断対象検査装置用のプログラム、および、裁断対象検査システム
【課題】多段積みされた裁断対象を精度良く検査できる裁断対象検査装置等を提供する。
【解決手段】多段積みされた裁断対象Bkを検査する裁断対象検査装置において、所定形状のレーザ光L1、L2が投影された裁断対象の画像データを取得し(S7)、画像データからレーザ光が投影された部分の画像を抽出し、抽出されたレーザ光の画像からレーザ光の投影形状の情報を算出し(S8)、所定形状の情報と投影形状の情報とに基づき、多段積みされた裁断対象の良否を判定する(S11)。
(もっと読む)
画像処理装置、そのプログラム、および画像処理方法
【課題】ブロックマッチングにより探索される対応点の信頼度を改善する。
【解決手段】画像処理装置は、第1画像上に予め設定された注目点を空間的に内包する第1基準ブロックと、第2画像上に設定された複数の第1参照ブロックのそれぞれとの画像内容の類似度をそれぞれ表現した複数の第1指標値を取得する第1演算部と、該複数の第1指標値に基づいて、注目点に対応した対応点の複数の候補点を前記第2画像においてそれぞれ抽出する抽出部と、複数の候補点をそれぞれ空間的に内包する複数の第2基準ブロックのそれぞれと、第1画像上の第2参照ブロックとの第2ブロックマッチングにより、複数の候補点のそれぞれについて、対応点としての選択の適性を表現した複数の第2指標値を取得する第2演算部と、該複数の第2指標値に基づいて、複数の候補点の中から1つを選択することにより、対応点を決定する決定部とを備える。
(もっと読む)
部品高さ測定方法およびその装置
【課題】
周辺を壁で囲まれた凹型形状の被測定部品においても、内側形状を正確に計測することで、被測定部品の高さ及び体積を求めることができるようにする。
【解決手段】
載置面上に被測定部品を載置して被測定部品の高さ方向に移動可能なテーブルの載置面に垂直な方向から載置面上に載置された被測定部品に対物レンズを介して光パターンを投影し、テーブルを被測定部品の高さ方向に順次スッテプ移動させて各ステップ移動ごとに光パターンが投影された被測定部品を対物レンズを介して撮像して光パターンの画像を取得し、テーブルの各ステップ移動ごとに撮像して取得した光パターンの複数の画像を処理して被測定部品の各部の高さ情報を得て被測定部品の高さ画像または高さ情報を含む画像を生成して部品高さを測定するようにした。
(もっと読む)
形状測定装置並びに深さ測定装置及び膜厚測定装置
【課題】試料表面の変位量が大きくても、フェーズラッピングの問題が生ずることなく、試料の微細な表面形状を高分解能で測定できる形状測定装置を実現する。
【解決手段】白色光源から出射した照明光は、入射光をシャーリングする第1の光路と入射光に対して可変光路長ないし可変位相量を導入してフリンジスキャンを行う第2の光路とを有する干渉光学系及び対物レンズを経て試料に入射する。試料上には、シャーリングされた参照ビームにより形成される第1の照明領域とフリンジスキャンされた測定ビームにより形成される第2の照明領域が形成される。第1及び第2の照明領域から出射した反射光は、対物レンズ及び干渉光学系を介して2次元撮像装置に入射し、2つの照明領域の画像が合成された干渉画像が形成される。フリンジスキャンにより、2つの画像を構成する反射光間に白色干渉が発生し、干渉信号を検出することで、試料の形状又は孔の深さが測定される。
(もっと読む)
対象物検出装置
【課題】対象物検出装置は、画像に所定の対象物が含まれていることを検出するために、一定の処理量が必要となるパターン認識処理を行う。このパターン認識処理に必要となる処理量は、従来の対象物検出装置において比較的大規模なものとなっている。よって、このパターン認識処理における処理量を削減したいという要望がある。
【解決手段】撮像装置群が撮影する2枚1組のステレオ画像に写っている被写体における視差を利用して、画像を構成する画素毎に、被写体までの距離を算出する。そして、画像に写っている被写体のうち、背景よりも手前に写っている被写体の部分の画素群を抽出する。さらに、これら抽出した被写体の部分の画素群に対して、統計的学習に基づくパターン認識処理を行い、これら抽出した被写体の部分の画素群の中に、予め定められた所定の対象物が被写体として含まれていることを検出する。
(もっと読む)
画像処理装置、画像処理方法、およびプログラム
【課題】処理時間を低減することができる画像処理装置、画像処理方法、およびプログラムを提供する。
【解決手段】モニタ22は、計測対象物の画像と、計測対象物に対応する物体であって予め算出された3次元形状を有する物体の画像とを表示する。CPU34cは、リモコン23を介して入力される指示に基づいて、計測対象物の画像上の第1の点と物体の画像上の第2の点とを指定する。CPU34cは、第1の点を基準とする第1の図形と、第2の点を基準とする第2の図形との幾何学計算を行い、幾何学計算の結果に基づいて、計測対象物の画像と物体の画像との少なくとも一方の姿勢または位置を調整する。CPU34cは、姿勢または位置が調整された後、リモコン23を介して入力される指示に基づいて指定された計測位置に対応する物体上の空間座標を算出し、算出した空間座標に基づいて、物体のサイズを算出する。
(もっと読む)
研削工具の砥面検査システム及び方法
【課題】砥粒の状態を新たな解析パラメータを用いてより詳しく解析し、これにより砥面の状態をさらに正確に検査できるようにする。
【解決手段】カメラ6により砥石3の砥面を撮像してそのライン画像データを取り込み、各ライン画像データに対し砥粒抽出処理部123により複数種のフィルタリング処理を行うことで上記ライン画像データから砥粒切れ刃候補の画像を抽出する。そして、砥粒解析処理部124の制御の下で、上記抽出された各砥粒切れ刃候補の画像から、砥面全域における各砥粒切れ刃候補の重心の座標と、凸多角形近似データ及び円形度と、内部欠損及び外部欠損と、面積及び欠損度と、すくい角側の稜線形状をそれぞれ算出または検出する。そして、この得られた解析パラメータをもとに、砥石3の幅方向における砥粒分布ヒストグラムと、砥石3の砥面全域における砥粒の分布状態を表す三次元マップを生成する。
(もっと読む)
物体までの距離を測定するためのシステムおよび方法
【課題】1つまたは複数の物体の画像から得ることができる、距離測定の予測精度を反映している信号を提供する。
【解決手段】物体14までの距離12を測定するためのシステム10が、ある位置に配置されたカメラ16と、カメラ16の設定を反映した信号30,32,34とを備える。カメラ16に作動可能に接続された制御装置18が、信号を受信し、信号に基づいて精度信号36を生成する。精度信号36は、距離測定の予測精度を反映している。制御装置18に作動可能に接続された表示器38,42が、精度信号36を反映している表示を提供する。距離測定の方法は、カメラを配置するステップ、距離測定の予測精度を反映している信号を生成するステップ、信号を反映している表示を提供するステップ、その位置で物体の1つまたは複数の画像を撮影するステップと、その1つまたは複数の画像に基づいて、物体までの距離を計算するステップとを含む。
(もっと読む)
161 - 180 / 2,813
[ Back to top ]