
Fターム[2F065QQ24]の内容
光学的手段による測長装置 (194,290) | 信号処理 (28,761) | 信号の記憶 (4,476) | 画像の (2,813)
Fターム[2F065QQ24]に分類される特許
81 - 100 / 2,813
微小角変位測定方法と装置
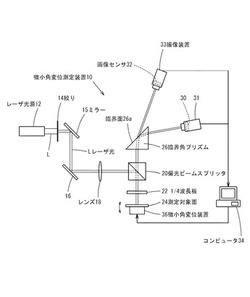
【課題】簡単な構造で、数十ナノラジアン以下の微小角変位を測定可能な微小角変位測定方法と装置を提供する。
【解決手段】レーザ光源12と、レーザ光源12からのレーザ光Lを収束又は発散させるレンズ18と、レーザ光Lを分岐させる偏光ビームスプリッタ20と1/4波長板22を有する。測定対象面24で反射したレーザ光Lが、臨界角直前の角度で臨界面26aに入射する臨界角プリズム26を備える。臨界角プリズム26の臨界面26aで反射したレーザ光Lが入射する一方の画像センサ30と、臨界角プリズム26の臨界面26aを透過したレーザ光Lが入射する他方の画像センサ32とを備える。各画像センサ30,32の各画素の出力を基に、測定対象面24の微小角変位を演算する微小角変位演算手段であるコンピュータ34を備える。臨界角プリズム26に入射するレーザ光Lを分割するビームスプリッタを設けても良い。
(もっと読む)
計測装置及び電気的装置

【課題】光学センサを用いて用紙搬送量を正確に特定する。
【解決手段】画像形成装置は、記録ヘッドを搭載するキャリッジを主走査方向に搬送し、用紙を搬送ローラを通じて主走査方向とは垂直な副走査方向に搬送する。この画像形成装置は、キャリッジの静止状態で、用紙搬送方向に平行な第一の検出方向への用紙移動量及びキャリッジ搬送方向に平行な第二の検出方向への用紙移動量を検出可能な光学センサを備える。キャリッジに固定された光学センサは、キャリッジの移動に伴って、キャリッジと共に傾くため、本装置では、リニアエンコーダを用いて検出したキャリッジ位置、ロータリエンコーダを用いて検出した搬送ローラ回転量、及び、光学センサの検出値を用いて、光学センサの傾き(角度θ)を算出する(S270)。そして、用紙搬送中にキャリッジが搬送される際には、光学センサにより検出された第一の検出方向の用紙移動量を上記角度θに基づいて補正する。
(もっと読む)
画像読取システム、原稿サイズ検出装置、及び原稿サイズ検出方法、並びに画像読取方法
【課題】原稿の厚みに影響されず安定して原稿の画像を読み取ることができる画像読取システム、原稿サイズ検出装置、及び原稿サイズ検出方法、並びに画像読取方法を提供する。
【解決手段】原稿の画像を読み取る画像読取装置と、画像読取装置を制御する制御装置とを備えた画像読取システムであって、原稿を搬送路に沿って搬送する搬送手段と、搬送路の途中に設けられ且つ原稿の厚みに応じて搬送路から離れる方向に移動可能に設けられ、搬送路に沿って搬送される原稿の画像を読み取る画像読取手段と、画像読取手段で読み取った原稿の画像データに所定の処理を施す画像処理手段と、原稿の厚みを判別する原稿の厚さ判別手段と、原稿の厚さ判別手段による判別結果に基づいて、画像読取手段による原稿の読取条件、又は画像処理手段による原稿の画像処理条件を変更する変更手段とを備え、原稿の厚みに影響されず安定して原稿の画像を読み取るようにした。
(もっと読む)
位置検出装置、描画装置、および、位置検出方法
【課題】基板の面内領域から取得できる情報を用いて、基板の位置を迅速かつ確実に検出できる技術を提供する。
【解決手段】位置検出装置は、基板9を載置するステージ11と、ステージ11に載置された基板9の面内領域を撮像する撮像部と、撮像部が取得した撮像データに基づいて基板9の位置を特定する位置特定部と、を備える。位置特定部は、撮像データを解析して、基板の表面に形成されたスクライブラインのうち最外周に配置されている最外周スクライブライン910を検出し、最外周スクライブライン910の検出位置に基づいて、レイアウト領域93の中央に配置されている中央チップ領域920の位置を特定する。そして、中央チップ領域920の位置に基づいて、基板中心90の位置を特定する。
(もっと読む)
画像取得装置および画像取得方法
【課題】受光部のフォーカス調整を容易に行う。
【解決手段】画像取得装置は、ガラス基板9上における線状の撮像領域を撮像する撮像ユニット2と、ガラス基板9を撮像領域と交差する方向に移動する移動機構とを備える。撮像ユニット2は、光照射部21および受光部23を有し、光照射部21により撮像領域に光が照射され、撮像領域からの光が受光部23のラインセンサへと導かれる。画像取得装置では、受光部回動機構が受光部23を回転することにより受光部23の光軸J2とガラス基板9の法線Nとのなす検出角θ2が変更される。撮像ユニット2は、光軸J2に沿って受光部23を移動する受光部移動機構をさらに備え、検出角θ2の変位量に基づいて受光部移動機構を制御することにより、光軸J2上においてラインセンサの受光面と共役な位置Pがガラス基板9の表面に配置される。これにより、受光部23のフォーカス調整が容易に行われる。
(もっと読む)
3次元位置・姿勢認識装置およびその方法、プログラム
【課題】本発明は、対象体本来の形状のうち部分的な形状の情報を欠いた計測点群を用いる場合であっても、対象体の3次元位置・姿勢を適切に認識可能な3次元位置・姿勢認識装置およびその方法、プログラムの提供を目的とする。
【解決手段】本発明にかかる3次元位置・姿勢認識装置は、計測点群と、対応するモデル点群とをマッチングさせ、モデル点群のうち、マッチング結果に基づいて特定される点を削除処理するモデル処理手段10と、計測点群と、モデル処理手段10において削除処理したモデル点群とをマッチングさせ、対象体3の3次元位置・姿勢を認識する認識手段11とを備えることを特徴とする。
(もっと読む)
金属板の外観評価方法
【課題】研磨部及び再研磨部の仕上がり具合を簡単な手法で定量的に評価できる金属板の外観評価方法を提供する。
【解決手段】この金属板の外観評価方法では、金属板1の表面のデジタル画像10をスキャナ4によって取得し、デジタル画像10の一部画像11に含まれる各ピクセルのRGB値をグレースケール変換して得られるAc値の波形パターンに基づいて研磨部2及び再研磨部3の外観の可否を判断する。波形パターンを用いることで、研磨部2及び再研磨部3の外観を容易かつ定量的に判断できる。また、この方法では、波形パターンに基づいて、研磨部2及び再研磨部3の研磨方向がスキャナ4の走査方向と一致しているデジタル画像10を判断対象として選別する。この前処理により、外観判断工程で用いる波形パターンのS/N比が向上し、判断精度が高められる。
(もっと読む)
欠陥検査装置
【課題】製造ラインを連続して搬送される開口を塞ぐシール部を有する被検査物に対して、特殊領域特定のために準備工程を必要とせず、検査時間の大幅な短縮が可能な、効率の良い検査性能に優れた検査装置を提供する。
【解決手段】容器を搬送する手段と、第一の光学手段と、第一の光学手段の容器搬送方向の下流に設けられた第二光学手段と、第一の特殊領域特定手段と、第一の特殊領域に基づいてシール部の液漏れ欠陥を検出する第一の検査手段と、前記エッジ座標と、第一の撮像手段と第二の撮像手段の取り付け角度の角度差と、第一の撮像手段と第二の撮像手段から得られた撮像画像における検査領域の中心座標から、第二の撮像手段によって得られた画像の第二の特殊領域を特定する第二の特殊領域特定手段と、第二の撮像手段によって撮像した画像の第二の特殊領域に基づいて容器の異物欠陥を検出する第二の検査手段と、を備えたことを特徴とする欠陥検査装置。
(もっと読む)
可動式ホーム柵監視用カメラ装置
【課題】都市部の駅ホームや、地下鉄の駅ホームでは、駅ホームのスペースが狭く、列車の乗降口または可動式ホーム柵の開閉部を広範囲にするための監視用カメラ装置のカメラ部の設置スペースを十分に確保できない。
【解決手段】本発明の可動式ホーム柵監視用カメラ装置は、可動式ホーム柵と、反射鏡と、前記可動式ホーム柵内に設置し前記反射鏡を介して前記可動式ホーム柵を撮像するカメラ部と、前記カメラ部が撮像した画像から乗客を検出する画像処理部と、モニタとを備え、前記画像処理部は、前記カメラ部が撮像した画像から前記可動式ホーム柵の開閉部およびその周辺を切り出して合成した合成画像を作成し、前記モニタは、前記合成画像を表示する。
(もっと読む)
マシンビジョン検査システムおよびその位置測定結果の決定方法
【課題】複数の視野に分割された対象を高精度に測定することができるマシンビジョン検査システムおよびその位置測定結果の決定方法を提供する。
【解決手段】マシンビジョン検査システムは、第1動作状態においてスケールベースの測定により第1対象FE1の位置を測定する。第2動作状態では、第1対象から第2対象に至る途中で重複画像CIA〜CICを撮影し、画像相関を利用して重複画像CIA〜CICの相互の画像変位を測定し、第1対象の位置と画像変位のセットとを合わせて第2対象FE2の位置を測定する。
(もっと読む)
箱体の品質検査装置
【課題】箱体の姿勢にかかわらず接合部の精度を正確に検査でき、箱体の形状精度や印刷品質、異物の有無も同時に検査することができ、検査スペースの効率化を図ることができる品質検査装置を提供する。
【解決手段】接合部を挟んで隣り合う2つの領域を撮像する撮像手段3と、照明手段4と、基準形状データ記憶部、及び基準画像データ記憶部を有する記憶手段50と、撮像される画像に基づき形状データを検出し、各領域の基準形状データと対比することにより各領域のずれ量を算出し、各領域の形状精度の良否を判定する形状精度判定手段と、形状精度判定手段により算出される各領域のずれ量に基づき、当該箱体の接合精度の良否を判定する手段と、撮像手段により撮像される画像に基づき各領域の画像データと基準画像データ記憶部に記憶された各領域の基準画像データとを対比することにより各領域の印刷品質の良否及び異物の有無を判定する手段とを備えた。
(もっと読む)
複数波長による表面形状測定方法およびこれを用いた装置
【課題】 光干渉法を用いて、1波長の単色光を測定対象面に照射し、測定対象面までの距離を変更して、少なくとも3枚以上の画像を撮像して、各画素の輝度値から位相計算をおこない、隣接画素の位相値を用いて三次元形状を測定する位相シフト法が用いられて来たが、隣接画素間の段差に波長による制約があった。
【解決手段】広帯域な波長特性を有する照射光から波長の異なる複数の単色光を抽出し、それらを混在させて、分岐手段を介して測定対象面と参照面に同時に照射し、測定対象面と参照面とから反射して同一光路を戻る反射光によって生じる干渉縞の画像を測定対象面と参照面とからの反射光路長の差を変化させて、取得した前記複数枚の画像を単色光ごとに分解し、単色光ごとに求めた各画素の位相から、複数個の表面高さの候補群を求め、各候補群から共通する高さを実高さとして求める。
(もっと読む)
回路基板の個体識別装置および個体識別方法
【課題】回路基板の個体識別を簡便かつ容易に実現する回路基板の個体識別装置および個体識別方法を提供すること。
【解決手段】回路基板100上の複数の計測対象110の位置を計測し、計測対象110の計測値と計測対象110の設計値との差を計測対象110ごとの位置情報として取得する位置情報取得手段10と、位置情報取得手段10によって取得された位置情報の組み合わせを基板識別符号として登録する登録手段20とを備える回路基板の個体識別装置。
(もっと読む)
形状測定装置、形状測定方法、構造物製造システム及び構造物の製造方法
【課題】測定対象物の形状を高精度で測定できる形状測定装置、形状測定方法、及び構造物の製造方法を提供すること。
【解決手段】被測定物に所定の光量分布を有するパターン光を形成する照明部と、光が被測定物に照射される照射方向と異なる方向から被測定物に照射されたパターン光の像を撮像する撮像素子を含む撮像部と、像の撮像信号を評価する評価部と、評価部の評価結果に基づき撮像部の撮像結果に対して所定の処理を行うことで被測定物の位置情報を算出する処理部と、を備える形状測定装置に関する。
(もっと読む)
個体識別装置、個体識別方法、及びプログラム
【課題】所定の特性を有する微小細粒(タガント)を物品に付与し、更にその分布位置に基づいて高精度に個々の物品を識別することが可能な個体識別装置等を提供する。
【解決手段】個々の物品1の基材10上に、基材とは異なる光学反射特性を有し、かつ、異色の微細物質12、並びに特徴的な図案及び形状等を有する微細物質をランダムに配置しておく。また個々の物品をスキャナ等により光学的に読み取り、所定の画像処理を施して微細物質の特徴点及びその特徴点における色情報に関する特徴量を抽出し、基準特徴量データとして記憶部に記憶しておく。識別対象となる物品を上述の読み取りの際と同様の手法で読み取り、同様の画像処理を施して微細物質の対象物特徴量データを抽出する。そして、抽出した対象物特徴量データと記憶されている基準特徴量データとを比較することにより識別対象とする物品と基準物品とが同一個体であるか否かを判定する。
(もっと読む)
薄膜製造装置のアライメント調整方法、薄膜製造装置、該薄膜製造装置により製造した電気機械変換膜、電気機械変換素子、液滴吐出ヘッド及び液滴吐出装置
【課題】低コスト化を図れる導膜製造装置、製造した電気機械変換素子、液滴吐出装置を提供する。
【解決手段】第1のアライメント調整工程では着弾位置251をカメラ205で捕捉し着弾位置251がカメラ205の撮影撮影基準位置252に一致するように基板又は液滴吐出ヘッド201を相対的に移動する。第2のアライメント調整工程ではレーザレッドによってレーザ光を照射して照射跡を形成し照射跡をカメラ205で捕捉し照射跡がカメラ205の撮影撮影基準位置252に一致するように基板又はレーザヘッドを相対的に移動する。第3のアライメント調整工程では基板上に予め形成されているアライメントマークを撮像手段205で撮影したアライメントマークの形状に基づいて基板の向きを検知して基板の向きの調整を行いアライメントマークを撮像手段205の撮影基準位置に一致するように基板を移動することで基板の組付け位置の調整を行う。
(もっと読む)
検査装置、検査方法及び検査プログラム
【課題】検査対象毎に検査パラメータを設定する必要がなく、半田付けの実装の良否を適切に判定すること。
【解決手段】複数の半田接合部を含む画像から、半田接合部を含む部分画像を複数抽出する抽出部と、抽出部により抽出された複数の部分画像を用いて、半田接合部の実装の良否を判定する基準となる基準画像を作成する作成部と、作成部により作成された基準画像と各部分画像とを比較する比較部と、比較部による比較結果に基づき、各半田接合部の実装の良否を判定する判定部と、を備える。
(もっと読む)
変位検出警報システム
【課題】風や反射光などの外乱の影響による誤検出を低減させ正確な変位量を検出することができる、安価で高精度な変位検出警報システムを提供すること。
【解決手段】再帰反射材を用いた1枚のターゲットに対して、異なる方向から複数の変位検出装置によって撮影することで、昼夜問わず外乱による誤検出を低減させることができる。さらに、変位検出装置で撮影した画像データと過去の計測データと気象データを統合することにより、気温の変化によるターゲットもしくは変位検出装置の変形や、両方の変形、降雨や風による変位の誤検出が発生しやすい場合でも、高確率で正しい判定が可能になる。また、各変位検出装置でデータを分散して保存することにより、変位検出装置が最後の1台になっても、計測を継続することが可能である。
(もっと読む)
位置ずれマップ作成装置、パターン検査システム、及び位置ずれマップ作成方法
【課題】被検査試料に形成されたパターンの位置ずれマップを高精度に作成する装置を提供する。
【解決手段】位置ずれマップ作成装置200は、被検査試料から取得された光学画像と参照画像との間での位置ずれ量に基づいた位置ずれマップ(1)に対し、ワイドパスフィルタ処理をおこなって位置ずれマップBを作成するWPフィルタ処理部56と、ローパスフィルタ処理をおこなって位置ずれ量マップCを作成するLPフィルタ処理部58と、座標計測装置で計測された複数の位置計測用パターンの各パターンの位置の位置ずれ量に基づく位置ずれマップ(2)に対し、LPフィルタ処理をおこなって位置ずれマップCを作成するLPフィルタ処理部64と、位置ずれマップAと位置ずれマップBの差分に位置ずれマップCを加算することによって合成して位置ずれマップDを作成する合成部66と、を備える。
(もっと読む)
ロボットシステム
【課題】スリット光の予測投影領域を最適化することによってロボットによるワークの取出作業の速度および精度を向上させることができるロボットシステムを提供すること。
【解決手段】実施形態の一態様に係るロボットシステムは、投影部と撮像部と予測投影領域決定部と投影位置検出部とロボットとを備える。投影部は、ワークが載置される載置領域へスリット光を投影して所定の移動方向へ移動させる。撮像部は、ワーク上を移動するスリット光を順次複数回撮像する。予測投影領域決定部は、撮像された画像を移動方向と交差する交差方向へ横断し、画像における交差方向の中央に近いほど移動方向と平行な方向の長さが長くなるように、画像におけるスリット光の予測投影領域を決定する。投影位置検出部は、予測投影領域の中からスリット光の投影位置を検出する。ロボットは、検出された投影位置に基づいてワークを把持する。
(もっと読む)
81 - 100 / 2,813
[ Back to top ]