
Fターム[2F065QQ24]の内容
光学的手段による測長装置 (194,290) | 信号処理 (28,761) | 信号の記憶 (4,476) | 画像の (2,813)
Fターム[2F065QQ24]に分類される特許
41 - 60 / 2,813
画像処理装置および画像処理方法
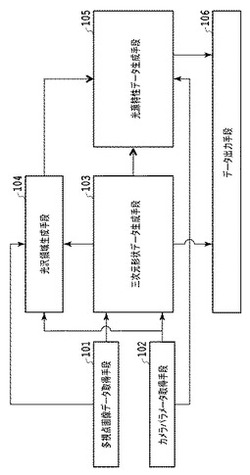
【課題】光沢が含まれる画像部分が形状生成に用いられず有効利用されない。
【解決手段】多視点で撮影した画像データから多視点画像間での対応領域を検出して被写体の三次元形状データを生成する。そして、対応領域のうち光沢のある光沢画像領域を示す光沢領域データを生成して、多視点画像データの光源の特性データを生成する。
(もっと読む)
車両ドア開閉の検知装置および検知方法

【課題】駅ホーム側だけで入線・停車した電車の車両ドアの開閉状態を検知することができ、外乱光や車両汚れの影響を受けず、高い検知精度で車両ドアの開閉状態に係る情報を取得でき、さらに、旅客の乗降状態および混雑状態を考慮して高い精度で車両ドアの開閉状態を検知できる車両ドア開閉の検知装置および検知方法を提供する。
【解決手段】この車両ドア開閉検知装置13は、駅ホーム11に停車した電車14の車両ドア15の開閉状態を検知する装置であり、乗降口41付近の車両床面42を含む範囲を測距対象範囲18と設定して駅ホーム側に設置された距離画像センサ21と、距離画像センサが取得した三次元距離画像44,45に基づいて車両ドアの開閉状態を判断する車両ドア開閉判断手段32とを備えている。
(もっと読む)
物品の3次元位置姿勢の認識装置及び認識方法
【課題】製造現場で使われる汎用的な組み込み装置でも実施できるような、少ない計算コストで物品の3次元位置姿勢を認識できる認識装置及び認識方法の提供。
【解決手段】カメラ20で複数の物品22がバラ積みされた領域全体の2次元画像を取得し、レンジセンサ18でカメラ20と略同じ領域の3次元情報を取得する。取得した3次元情報から、取り出すべき物品が存在するであろう空間を対象空間として大まかに限定し、該対象空間に基づいて2次元画像処理で物品を探索するための探索条件を設定し、該探索条件に基づいて物品の画像上での2次元位置情報を取得する。次に該2次元位置情報を用いて、物品の3次元位置姿勢の認識に使用する3次元点データを選定し、カメラ20の焦点から該物品に向かう3次元空間上の視線を計算し、該3次元点データと視線とに基づいて物品の3次元の位置姿勢を計算する。
(もっと読む)
印字装置および印字方法
【課題】金属コイルを固縛するバンドに跨って印字することなく、固縛後の金属コイルの表面に対して、印字レイアウトの制約を遵守しつつ情報を的確に印字できること。
【解決手段】本発明の一態様にかかる印字装置1は、バンド16によって固縛された金属コイル15に印字する装置であり、検出部2および印字レイアウト決定部8を備える。検出部2は、金属コイル15の印字対象領域の中から、バンド16の位置等を含む印字不可領域と、この印字不可領域以外の印字可能領域とを検出する。印字レイアウト決定部8は、指示された制約を加味した印字レイアウトと印字可能領域との適合度を所定の評価関数によって評価して、この制約を遵守しつつ印字可能領域に文字群を印字できる印字レイアウトの候補を複数選出し、選出した複数の候補のうち、文字群の印字面積が最大となる候補を印字レイアウトとして決定する。
(もっと読む)
回転機ギャップ計測装置
【課題】画像処理により直接的にギャップを計測し、また、異常を検出した場合の保守作業員の目視による確認作業の手間を省くことを可能とする。
【解決手段】カメラ1で、照明器具2により照らされた回転機のギャップ14を撮影し、撮影した画像データは画像伝送器4によって電気信号から光信号に変換され、光ケーブル8を通り情報装置盤6内の画像伝送器5に送信される。送信された光信号は、画像伝送器5において電気信号に再び変換され、画像伝送器5から画像解析装置7に送信される。画像解析装置7では画像伝送器5から送信されてきた画像データを基にギャップ14の計測を行い、計測した情報はネットワーク13a経由で遠隔地にある監視装置13bへ送信される。これによって、監視装置13bにより確認することができる。
(もっと読む)
撮像素子の異物検出方法及びその装置
【課題】撮像素子の受光面とその前方に配置されたカバーガラス等の透明体の前面及び背面のうちのいずれかの表面に存在する異物の位置、大きさ、形状を特定することができる撮像素子の異物検出方法及びその装置を提供する
【解決手段】本発明に係る異物検出装置は、撮像素子パッケージ2を装着部50に装着し、光源部60から照明光を照射して、撮像素子10の受光面の像を撮像する。光源部60から受光面10Aに照射する照明光は、例えば、平行光と、点光源からの拡散光とで切り替えられ、各々の照明光により照明している状態で撮像した撮影画像を制御・検査部80に取り込み、それらの画像を比較することによって、異物の3次元的な位置、大きさ、形状を特定する。
(もっと読む)
部品実装基板生産装置、および、三次元形状測定装置
【課題】高精度かつ高速に測定対象物の三次元形状を測定する部品実装基板生産装置および三次元形状測定装置を提供する。
【解決手段】部品実装装置であって、撮像部であるカメラ200と、輝度変化光を発する発光部130と、測定対象物の表面における輝度変化光の輝度分布を相対的に第二方向に移動させるヘッド100と、測定対象物との間の距離が維持されるように配置された基準面部113と、基準面部の基準面部位の少なくとも3点の輝度変化光を撮像した結果である基準面データおよび対象物データを取得するデータ取得部160と、基準面部における光の輝度分布と基準輝度分布との位相差から、基準面部の所定の位置からの第三方向におけるずれ量を算出するずれ量算出部170と、ずれ量を用いて測定部位における光の輝度値を補正する補正部180と、補正された輝度値を用い、位相シフト法に用いられる波形を作成する波形作成部190とを備える。
(もっと読む)
目標位置検出装置、該検出装置に用いられる目標位置検出方法及び目標位置検出プログラム
【課題】夜間でも複数の目標対象物の捜索が可能な目標位置検出装置を提供する。
【解決手段】目標対象物位置特定手段(画像処理・座標演算装置21)により、画像記録部33に記録されている赤外画像iu、及びデータ記録部34に記録されているGPS/姿勢データfdが解析され、発熱物体が存在する位置が目標対象物の位置として特定される。この場合、画像処理・座標演算装置21により、赤外画像iu及びGPS/姿勢データfdに基づいて、各赤外画像iu上の発熱物体の座標位置を、赤外カメラ13の位置を基準とする方位ベクトル線に対応付けることにより、発熱物体に対して時系列の方位ベクトル線群が生成され、方位ベクトル線群を構成する各方位ベクトル線の共通部分が目標対象物の絶対座標(緯度、経度、及び高さ)として特定されて対象地点座標データedが出力される。
(もっと読む)
同軸落射照明の光量設定方法およびラベルの位置ズレ検査方法
【課題】製品に貼着されたラベルの位置ズレ等を光学的に検出する際に、ラベルの印字パターンや製品の色、材質が異なる生産ロットで検査を行う場合にも、容易に照明レベルを適切に設定できる光量設定方法を提供する。
【解決手段】同軸落射照明22により、カメラ21のレンズと同軸上から光を照射し、カメラ21により、テープカートリッジ11上に貼着されたラベル12の貼着状態を検出する。光量設定部25は、同軸落射照明22の光量レベルを低光量レベルから高光量レベルに徐々に上昇させ、ラベル12の外縁と浅溝の縁端により生じる2つのエッジを検出し、全ての部分で2つのエッジが判定できなくなったら、このときの光量に、1以下の実験係数を乗算することで、同軸落射照明22の最適な光量を設定する。
(もっと読む)
固定部材検出ユニット、固定部材解体システム、固定部材解体方法、およびプログラム
【課題】解体対象を固定している固定部材の位置の検出精度を高めること。
【解決手段】解体対象を撮像した撮像画像から、前記解体対象を固定している固定部材の画像として予め決められている固定部材画像を検出する固定部材画像検出部と、前記固定部材画像検出部により検出された前記固定部材画像の位置を示す位置情報を算出する位置情報取得部と、前記解体対象を固定している複数の前記固定部材の予め決められた位置関係を示す配置パターンと前記位置情報とに基づき、前記固定部材画像検出部によって検出された前記固定部材画像が前記配置パターンに含まれる前記複数の固定部材に対応するか否かを判定する配置パターン対応確認部と、を備える。
(もっと読む)
コンクリート打継面の評価装置
【課題】先行して打設したコンクリートの表面に新たなコンクリートを打設する打継面の評価を、客観的に行う装置と方法を提供する。
【解決手段】
ラインレーザー1とデジタルカメラ2と解析用パソコン3によって構成する。ライン状のレーザー光線をコンクリート打継面4に照射する。その照射線41をデジタルカメラ2で撮影する。撮影した照射線41を画像解析することで座標データとして抽出してコンクリート表面の評価を行う。
(もっと読む)
タイヤ形状検査方法、及びタイヤ形状検査装置
【課題】凹凸マーク上に重なるように凹凸欠陥が存在する場合にも、凹凸マークの高さ分だけを差し引いて凹凸欠陥のみの高さを算出・取得する。
【解決手段】凹凸マークが形成されたサイドウォール面を有するサンプルタイヤの画像を用いて、検査タイヤのサイドウォール面の形状欠陥を検査するタイヤ形状検査方法において、次の工程を実行する。まず、ティーチング作業工程として、サンプルタイヤのサンプル原画像において、凹凸マークの境界線を検出し、境界線を示すマスク画像を生成し、サンプル原画像からマスク画像に示された境界線に対応する領域を除き、残りの領域の高さを1又は複数のオフセット値で表す高さオフセット画像を生成する。次に、検査作業工程として、検査タイヤの検査画像から、高さオフセット画像を差し引くと共に、マスク画像が表す境界領域を除去し、得られた凹凸除去画像に基づいて、検査タイヤのサイドウォール面の形状欠陥を検査する。
(もっと読む)
光学式検査装置及びエッジ検査装置
【課題】ウェハエッジ部の幅広い位置変化にも追従することができる光学式検査装置及びエッジ検査装置を提供する。
【解決手段】ウェハ100の表面の欠陥を検査する表面検査装置300と、この表面検査装置300に対するウェハ100の搬送路に設けたウェハステージ210と、このウェハステージ210上のウェハ100のエッジ部を検査するエッジ検査部530と、このエッジ検査部530を当該エッジ検査部530の光軸に沿って移動させる移動装置650とを備えたことを特徴とする。
(もっと読む)
熱源位置角度検出方法
【課題】熱源の大きさが赤外線カメラ1画素の検出範囲よりはるかに小さな場合であっても、赤外線カメラの画素数を増やすことなくカメラから熱源までの位置角度を精度良く求める。
【解決手段】検出範囲の最も赤外線カメラから遠くにあり、1画素の検出範囲よりもはるかに小さな熱源であっても、赤外線カメラのレンズの焦点をずらし、3画素に赤外線が入射させ3画素が出力するデータの大小を比較することにより精度の高い熱源の角度検出を行う。
(もっと読む)
回転角度計測装置及び方法
【課題】計測対象の回転体の回転角度を、計測センサが非接触で、計算コストを抑え且つ高精度で計測する。
【解決手段】回転体1の回転角度と一意的に対応するマーカ模様の境界線を有する螺旋状マーカ2を回転体1に設置し、ラインセンサ4で螺旋状マーカ2を撮影し、解析装置5によって、予め求めておいたマーカ模様の境界線位置から回転体1の回転角度を計算する式を基に、ラインセンサ4で撮影した画像から回転体1の回転角度を計測する。
(もっと読む)
3次元座標取得装置、カメラ姿勢推定装置、プログラム
【課題】カメラ姿勢の推定精度を向上させるとともに、処理負荷を軽減させる。
【解決手段】3次元座標取得装置100は、カメラによって撮像された立体対象物の撮像画像から当該カメラのカメラ姿勢を推定する際に用いられる前記立体対象物の3次元座標を取得する3次元座標取得装置であって、前記撮像画像から、画像平面内の特徴点を検出する特徴点検出部111と、前記カメラの焦点及び前記画像平面内の特徴点を通過する直線の方程式と、前記立体対象物の方程式とから、前記直線と前記立体対象物との交点を算出し、前記特徴点の3次元座標として取得する3次元座標取得部113とを備える。
(もっと読む)
検出装置
【課題】可及的にワークの移動が自由であり、後工程の作業の妨げともなりにくい簡易な構成のワーク位置の検出装置を提供する。
【解決手段】検出光(40)を投光する投光部(10)と、検出光を受光する受光部(20)と、投光部と受光部を所定の位置関係に保つ支持手段(30)と、を備え、受光部が一次元又は二次元に配置された複数の受光素子を含み、上記支持手段が、投光部と受光部との間に設けられる検出基準面に対して検出光(40)が斜めになるように投光部と受光部の位置を保持する。
(もっと読む)
挿通孔の閉塞率評価システム、閉塞率評価方法及び閉塞率評価プログラム
【課題】蒸気発生器の挿通孔の閉塞率を容易に把握することができる閉塞率評価システム、閉塞率評価方法及び閉塞率評価プログラムを提供する。
【解決手段】本発明の挿通孔の閉塞率評価システムは、伝熱管と、伝熱管を通すための挿通孔が形成された管支持板とを備え、挿通孔が伝熱管が挿入された際にその周方向に形成される複数の隙間部を有する熱交換器に適用され、管支持板は長軸と短軸との比率が1.0以上2.0以下となる範囲内で3次元で楕円形状の模式図で表示され、各々の管支持板は重ならないように直列に配置され、3次元の楕円形状で表示した模式図を挿通孔の閉塞率を調査して得られた挿通孔の閉塞率の値に応じて色分けして表示する可視化処理を有することを特徴とする。
(もっと読む)
摩擦撹拌接合装置
【課題】被接合部材の目違いが生じたとしても、接合不良の発生を防止可能な摩擦撹拌接合装置を提供する。
【解決手段】被接合部材W1同士を接合する摩擦撹拌接合装置1であって、被接合部材W1同士の接合を行なう工具11を保持する工具保持部12と、工具11による接合方向の前方に設けられ、被接合部材W1の接合箇所の表面を押圧する押圧手段13と、押圧手段13と工具11との間における被接合部材W1同士の目違いを検出する目違い検出手段17とを備えることを特徴とする。
(もっと読む)
画像処理装置および画像処理プログラム
【課題】画像の領域の大きさを使用者の操作精度によらず容易かつ均一に得ることが可能な画像処理装置および画像処理プログラムを提供する。
【解決手段】画像データに基づく初期画像IMにおいて抽出される領域A4が表示部260の画像表示領域261に表示される。表示された領域A4に外接する外接矩形Pが作成される。作成された外接矩形Pが表示部260の画像表示領域261に表示されるとともに、作成された外接矩形Pの予め定められた部分の寸法または面積を示す特徴量が算出される。使用者は、入力装置を用いて表示部260の画像表示領域261に表示された外接図形Pを回転させることができる。
(もっと読む)
41 - 60 / 2,813
[ Back to top ]