
Fターム[2F065QQ27]の内容
光学的手段による測長装置 (194,290) | 信号処理 (28,761) | 信号の加算 (639)
Fターム[2F065QQ27]に分類される特許
141 - 160 / 639
光学的植生指数センサ
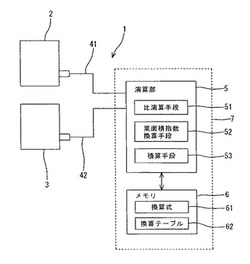
【課題】植生の内外で同時測定する必要がなく、年間を通して連続して安定した測定を行うことができ、安価で小型、軽量で出力が大きい光学的植生指数センサを提供することを目的とする。
【解決手段】本発明の光学的植生指数センサは、葉又は葉群を透過した透過放射を受光すると、400nm〜700nmの放射に対して分光特性の補正を行い、光電変換して光合成有効放射度または光合成光量子束密度の何れかを示すPAR出力として出力するPARセンサ2と、受光した放射に対して700nm〜1000nmの放射を取出し、光電変換してPAR出力と共通する単位の放射度または光量子束密度の何れかを示すIR出力を出力できるIRセンサ3と、IR出力の積算値をPAR出力の積算値で割って比を算出し、該比に対応した葉面積指数を求める演算部5を備えたことを主な特徴とする。
(もっと読む)
工具位置測定方法と装置

【課題】回転工具の刃先の三次元位置を非接触で測定することができ、繰り返し精度が高く、工具刃先形状の違いによる測定誤差が小さい工具位置測定方法及び装置を提供する。
【解決手段】回転する回転工具12の刃先12aを、Z軸方向から見た回転刃先画像を撮像する回転刃先撮像工程S11を有する。回転刃先画像から、回転軸αの概略位置の仮回転軸位置を原点として、X軸上及びY軸上の輝度分布を求める。原点及びその近傍のX軸方向の複数の位置であるX反転位置から、X軸方向に同一距離だけ離れた位置同士の輝度の差分を所定範囲でX軸方向に積分したX積分値を、X反転位置ごと算出する。同様にY軸方向に、同一距離だけ離れた位置同士の輝度の差分を積分したY積分値を、Y反転位置ごと算出する。X積分値及びY積分値が最も小さくなるX積分値差最小位置及びY積分値差最小位置とで定まる座標を回転軸位置とする。
(もっと読む)
シリンダ内径の計測方法及びその計測装置
【課題】シリンダライナの軸心上に配置することなく、シリンダライナーの内径を計測するシリンダ内径の計測方法及びその計測装置を提供する。
【解決手段】内燃機関1を構成するシリンダライナー2の内部に位置して、シリンダライナー2の内周方向に回転し得る回転台6と、
回転台6の上に配置されて非接触でシリンダライナー2の内壁面2aまでの距離を測定する水平方向変位計7と、
回転台6により回転した水平方向変位計7の回転角度θと、水平方向変位計7により測定した水平方向の変位データLとから、回転角度の余弦COSθと変位データLの積によるX成分値、及び/または回転角度の正弦SINθと変位データLの積によるY成分値を求めてシリンダライナー2の内径を算出する制御部9とを備える。
(もっと読む)
光学式検出装置および電子機器
【課題】複雑な画像信号処理回路なしに簡単な構成で手などの人の動きを容易に検出できる小型で安価な光学式検出装置を提供する。
【解決手段】エリアセンサである発光素子2と、発光素子2から出射された光束を測定対象物20に照射する発光レンズ部4aと、測定対象物20からの反射光を集光する受光レンズ部5aと、受光レンズ部5aにより集光された測定対象物20からの反射光を検出する受光素子3と、受光素子3からの受光信号を処理する信号処理部7とを備える。上記信号処理部7は、受光素子3からの受光信号に基づいて、受光素子3上の光スポット位置または光スポット形状の少なくとも一方からxy座標平面上の測定対象物20のx座標またはy座標の少なくとも一方を検出する。
(もっと読む)
測定方法及び測定装置
【課題】物体の表面の形状を測定する精度の点で有利な測定方法を提供する。
【解決手段】物体の表面の形状を測定する測定方法であって、他の領域と重なり合う領域を有する前記表面の複数の領域のそれぞれに対する表面測定によって前記複数の領域のそれぞれの形状のデータを得るステップと、得られた前記形状のデータに基づいて、前記重なり合う領域での形状の差が最小になるように、前記表面測定の誤差を求めるステップと、前記形状のデータと前記誤差とに基づいて、前記表面の形状を求めるステップと、を有し、前記形状のデータは、要求精度に基づいて決定された閾値を超える空間周波数を有する成分を含まないように得られる、ことを特徴とする測定方法を提供する。
(もっと読む)
センシングシステム
【課題】本発明は、生産コストが低いセンシングシステムを提供することである。
【解決手段】本発明に係わるセンシングシステムは、ポインターをセンシングし且つポインターの位置を計算することに用いられる。本発明に係わるセンシングシステムは、パネルと、反射エレメントと、イメージ・センサー及びプロセッサーを備える。パネルは、第一平面及び前記第一平面に位置し且つ順次に連接する第一辺、第二辺、第三辺、第四辺を有する四角形である第一エリアを有する。反射エレメントは、第一辺に配置され、且つ第一平面の上に位置する。反射エレメントの第二平面は、反射面であって、パネルの第一平面に直交し、且つ第一エリアを照り映えて第二エリアを形成する。イメージ・センサーは、第三辺と第四辺が交差する隅に配置され、且つ第一平面の上に位置する。イメージ・センサーのセンシング範囲は、第一エリア及び第二エリアを覆う。プロセッサーは、イメージ・センサーに電気接続する。
(もっと読む)
光学式信号出力装置の信号処理装置及び光学式変位検出装置
【課題】位置検出の分解能及び安定性を広い変位検出範囲に渡って高いレベルで維持しつつ且つスケール上の欠陥等の影響による信頼度をもチェックできる光学式信号出力装置の信号処理装置及びそのような信号処理装置を備えた光学式変位検出装置を提供すること。
【解決手段】スケール50上に形成され、変位検出対象物の変位方向Xに沿って実効反射率が漸増する光学特性を有するグレートラック51に光ビーム61を照射して得られる第1の信号群の振幅成分と変位検出対象物の変位方向Xに沿って実効反射率が漸減する光学特性を有するグレートラック52に光ビーム62を照射して得られる第2の信号群の振幅成分との和と第1の信号群の振幅成分と第2の信号群の振幅成分の差との比から変位検出対象物の絶対変位を求める。また、第1の信号群の振幅成分と第2の信号群の振幅成分の和から光学式信号出力装置が正常であるか否かを判定する。
(もっと読む)
複屈折基板の板厚測定法及び板厚測定装置
【課題】複屈折基板の板厚を正確に求める板厚測定法を得る。
【解決手段】予め複屈折基板の板厚tと反射干渉光強度波長特性の振幅の節に対応した波
長λ(t)との関係を求めるステップと、前記基板の反射干渉光強度波数特性を取得する
ステップと、前記反射干渉光強度波数特性の節より波数の大きい領域の前記反射干渉光強
度波数特性のデータに対し、相隣接する2つのデータのうち波数の大きい側のデータから
波数の小さい側のデータを減じ、それに−1を乗じた値を求め、この値を波数の小さい側
のデータに加算した新データで、波数大きいデータを置換して補正反射干渉光強度波数特
性を求めるステップと、前記補正反射干渉光強度波数特性にFFT処理を施して、複屈折
基板の板厚を求めるステップと、を含む複屈折基板の板厚測定法である。
(もっと読む)
パターンマッチング装置およびそれを用いた半導体検査システム
【課題】CADデータに対応する画像データの位置情報を検出するパターンマッチング装置において、CADデータの形状とホールパターンの形状が大きく異なる場合でも、正確にパターンマッチングする。
【解決手段】ホールパターンの中心位置を画像化したデータ111を生成するCADホールパターン中心位置検出手段107と、画像データ105からパターンデータ112を抽出するパターン抽出手段108と、パターンデータ112からホールパターンの中心位置を検出し、画像データ105から検出したホールパターンの中心位置を画像化したデータ113を生成する手段109と、CADホールパターン中心位置データ111と画像ホールパターン中心位置データ113との照合処理により、CADデータ104に対応する画像データ105の位置データ114を検出する照合処理手段110と、信号出力インターフェース103と、で構成する。
(もっと読む)
搬送監視装置および搬送監視方法
【課題】被搬送物と撮像部との間に透明体が介在する監視環境にあっても、被搬送物の搬送状態を高精度に管理可能な装置及び方法を提供する。
【解決手段】第1の搬送監視装置10Aは、透明体1越しに被搬送物2の搬送状態を監視し、被搬送物2及び搬送部3の画像を取得する撮像部11と、撮像部11が取得した画像のベクトルデータを演算する演算部12と、被搬送物2及び搬送部3のモデルデータを記憶する記憶部13,14と、画像中の被搬送物2及び搬送部3の位置を抽出する位置抽出部15,16と、被搬送物2及び搬送部3の相対的位置を算出する相対位置算出部17と、被搬送物2及び搬送部3の正常な相対的位置関係を記憶する記憶部18と、相対位置算出部17が算出した相対位置が正常か否かを判定する判定部19と、判定部19での判定結果に応じて所定の警告を発する警告部20とを具備する。
(もっと読む)
立体形状測定システム及び立体形状測定方法
【課題】対象物体に動きがある場合であっても測定精度の低下を抑止すること。
【解決手段】投影装置がそれぞれ異なる第一〜第三模様を物体に対して投影する状態で繰り返し遷移し、撮像装置が第一〜第三模様が投影された物体の画像をそれぞれ生成し、立体形状測定装置が各画像において、各ピクセルの輝度値の時間変化を表す波形の位相をピクセル毎に算出し、異なる撮像装置によって撮像された各画像において、各ピクセルの輝度値及び位相に基づいて、物体の三次元空間上の同一点が撮像された画像平面上のピクセルの対応付けを行い、各対応点の画像上の座標に基づいて物体の立体形状を測定する。
(もっと読む)
画像処理方法
【課題】 光沢をもつ物体の三次元形状を計測する際に問題となる画像中に観測される正反射領域の判定を行う画像処理方法を提供する。
【解決手段】 制御部11が対象物Qを撮像した2次元画像データ中において正反射領域に相当する輝度の閾値を示す対象領域を抽出する第一検出工程と、第一検出工程によって対象領域が検出された時に、照明装置F1、F2の初期露光時間を所定の割合で短縮した露光時間で対象物を照明して撮像した比較2次元画像データ中において正反射領域に相当する閾値を抽出する第二検出工程とを行う。正反射領域判定部13は、比較2次元画像データ中に正反射領域に相当する閾値が検出されなかった時に、露光時間が2分の1より短い場合は、その比較2次元画像データの対象領域を正反射領域と判定する。よって、2次元画像データ中の正反射領域が正確に抽出可能になる効果を奏する。
(もっと読む)
障害物検知装置
【課題】障害物に明部と暗部が存在し、障害物の連続する輪郭が明部と暗部にまたがって存在する場合でも誤検知の少ない安定した障害物検知を可能とする障害物検知装置を提供する。
【解決手段】撮像画像から障害物検知のための処理画像を生成する処理画像生成部と、処理画像を複数の小領域に分割する小領域分割部と、複数の小領域と処理画像の画素値から小領域毎のエッジ閾値を設定するエッジ閾値設定部と、複数の小領域と処理画像から小領域毎の濃淡勾配値を算出し、算出された濃淡勾配値に対応する小領域のエッジ閾値を用いて、エッジ画像と勾配方向画像とを生成するエッジ抽出部と、エッジ画像内で設定されたマッチング判定領域内のエッジ画像及びエッジ画像に対応する勾配方向画像から障害物の有無を判定する障害物認識部と、を有し、小領域分割部は、自車外の照明状態に基づいて処理画像を複数の小領域に分割する障害物検知装置。
(もっと読む)
情報端末装置
【課題】地磁気センサを搭載する必要がなく、利用者の向きを推定したり、その推定結果に従って表示部の表示情報を制御したりすることができる、信頼性の高い情報端末装置を提供すること。
【解決手段】被写体11は、光源を含む全周からの光を受ける。撮像部12は、被写体11の画像を取得する。推定部13は、撮像部12により取得された画像を解析し、光源の方向に依存する特徴量を抽出し、該特徴量から撮像部により取得された画像における光源の方向を推定して基準方位を設定すると共に該基準方位を元に他の方位を推定する。制御部15は、メモリ14から表示情報を読み出すともに、推定部13により推定された方位に応じて、表示情報を制御し、表示部16に表示させる。
(もっと読む)
フォトマスクの特性検出装置およびフォトマスクの特性検出方法
【課題】本発明は、フォトマスクの特性を検出することができるフォトマスクの特性検出装置およびフォトマスクの特性検出方法を提供する。
【解決手段】被検出体に形成されたパターンの光学像に基づいて検出データを作成する検出データ作成部と、前記パターンに関する参照データを作成する参照データ作成部と、特性の検出対象となるパターンに対応する参照パターンと、前記参照パターンの位置情報と、を前記参照データから抽出する抽出部と、前記参照パターンに基づいて特性を検出する領域を設定するとともに、前記位置情報に基づいて前記検出データから前記特性の検出対象となるパターンを抽出する第1の領域設定部と、前記特性を検出する領域における前記特性の検出対象となるパターンの特性を受光面上に結像された光学像を光電変換することで検出する検出部と、前記検出された特性を集計する集計部と、を備えたことを特徴とするフォトマスクの特性検出装置が提供される。
(もっと読む)
光学的位置および/または形状センシング
マルチコアファイバを使用して形状センシングを行うための正確な測定方法および装置が開示される。マルチコアファイバの中のコアのそれぞれに対して、マルチコアファイバの上のある点までの光学長の変化を検出する。検出した光学長の変化に基づいて、マルチコアファイバの上のその点における、位置および/またはポインティング方向を求める。測定の精度は、マルチコアファイバの上のその点までのマルチコアファイバ光学長の0.5%よりもよい。好適な実施例では、測定するステップは、検出した光学長の変化に基づいて、少なくともマルチコアファイバの一部分の形状を測定するステップを含む。  (もっと読む)
(もっと読む)
三次元干渉顕微鏡観察
【課題】 三次元干渉顕微鏡観察を提供する。
【解決手段】 サンプル内にあるスイッチャブル光源のうち統計的に散在するサブセットが活性化され、活性化されたスイッチャブル光源が励起され、それにより、光ビームが、少なくとも2つの光路に沿って、活性化されたスイッチャブル光源から放出される。活性化されたスイッチャブル光源から第1の光路に沿って放出される第1の光ビームでの第1の波面修正が導入され、活性化されたスイッチャブル光源から第2の光路に沿って放出される第2の光ビームでの第2の波面修正が導入され、第2の波面修正が、第1の波面修正とは異なる。第1および第2の光ビームが、互いに干渉されて、複数の出力ビームを生成し、光源の三次元位置情報が、複数の出力ビームからの各出力ビームの強度に基づいて決定される。
(もっと読む)
高さ検出装置
【目的】対象物のパターンに依存することなくビームスプリッタの反射率を安定させることが可能な高さ検出装置を提供することを目的とする。
【構成】本発明の一態様の高さ検出装置100は、対象物101面に照明光を照明する照明光学系200と、対象物101面から反射された反射光を入射するλ/4板270と、λ/4板270を通過した反射光を分岐するビームスプリッタ222と、ビームスプリッタ222によって分岐された反射光の一方を前記反射光の結像点の前側で受光して、光量を検出する光量センサ252と、結像点の後側で受光して、光量を検出する光量センサ254と、光量センサ252,254の出力に基づいて対象物101面の高さを演算する演算回路260と、を備えたことを特徴とする。
(もっと読む)
メッシュ検査装置、メッシュ検査方法、プログラム、および記録媒体
【課題】エッチングや印刷のムラによりメッシュ幅の太さの変化に影響されずに正確な欠陥抽出を行うことが可能なメッシュ検査装置を提供する。
【解決手段】メッシュ検査装置1の処理部3は、ラインセンサ5からメッシュシート10のメッシュが画像に写る分解能で画像を入力し、前処理として光源である白色LED照明7によるシェーディングの補正を行い、前処理した画像を平滑化し、欠陥を誤検出しない程度に画像をぼかす。平滑化した画像内でしきい値により欠陥を抽出し、抽出した欠陥の重心を中心に例えば128×128画素を平滑化前の画像からトリミングする。トリミングした画像のFFT画像でメッシュの空間周波数に相当する領域を0に置き換えてメッシュ周波数を除去した後、IFFT処理を施し、得られた画像から欠陥の輝度、形状、面積の判定を行い、結果を出力する。
(もっと読む)
表面検査装置および方法
【課題】高速の画像処理が可能で、エッジ付近の汚れや形状不良の影響を受けず、簡単な構成で、正確な表面検査を行うことができる、表面検査装置および方法を提供することを課題とする。
【解決手段】被検査面に光を照射する光源と、前記被検査面からの反射光を受光し撮像する、互いに視野がオーバラップするように前記被検査面の幅方向に配列された複数台のカメラと、該カメラからの撮像信号を1対1対応で処理する複数台の画像処理装置と、該画像処理装置からの疵情報を処理する計算機とを備え、前記被検査面に存在する表面疵を検出する表面検査装置であって、前記画像処理装置は、それぞれ独立に、かつ、同一の処理を行う、エッジ検出処理手段およびエッジ処理手段を備える。
(もっと読む)
141 - 160 / 639
[ Back to top ]