
Fターム[2F065QQ27]の内容
光学的手段による測長装置 (194,290) | 信号処理 (28,761) | 信号の加算 (639)
Fターム[2F065QQ27]に分類される特許
121 - 140 / 639
非球面形状測定装置
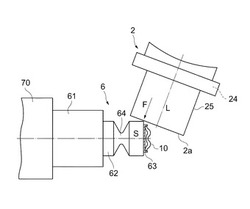
【課題】被測定面の非球面形状を高精度に測定する際に、被測定物を保持するサンプルステージと干渉光学系の照射先端部との衝突による干渉光学系の照射先端部の破損を防止した構造を有する測定装置を提供する。
【解決手段】被測定物10を保持する被測定物保持機構Aと、測定光を照射して光干渉測定を行う干渉光学系2を有する干渉光学機構Bとは、それぞれ相対的に移動可能に設置されてなり、被測定物保持機構Aにおける被測定物10を先端に保持するサンプルステージ6に干渉光学系2の照射先端部2aと衝突した際に衝撃を吸収する低強度部64を設けて干渉光学系2の破損を防止する。
(もっと読む)
袋入り製品の位置検出方法及びその装置

【課題】袋入り製品の袋歪みに影響されずにケース内の袋入り製品を認識して、その位置を短時間で検出することが可能な袋入り製品の位置検出方法及びその装置を提供する。
【解決手段】袋入り製品の位置検出装置10は、表面に模様が記載された収納袋に物品を封入した袋入り製品の群から抽出した複数のサンプルの表面に現れる模様のサンプル画像12の輝度分布特徴を求める学習手段13と、袋入り製品がケース内に並べられた状態を撮影したカメラ画像15から切出した複数の分割画像16の中から、輝度分布特徴に似た類似輝度分割画像を求め、類似輝度分割画像のカメラ画像15内での位置に基づいて袋入り製品のケース内での製品位置を求める認識手段17とを有する。
(もっと読む)
画像処理方法および画像処理装置
【課題】上述のような液体レンズを用いて、ワークに対する画像処理を適切に行うことが可能な画像処理方法および画像処理装置を提供する。
【解決手段】液体レンズへの駆動電圧の印加後、撮像部に画像データを順次生成させるとともに、これらの画像データを記憶する。そして、記憶した画像データに対して合焦判定を行って、その合焦判定の結果に基づいて、後段の画像処理に適切な(1または複数の)画像データおよび/または(1または複数の)部分画像を選択する。さらに、選択された画像データまたは部分画像を用いて、画像計測処理や画像合成処理を実行する。
(もっと読む)
情報処理装置、その処理方法及びプログラム
【課題】
被写体の三次元計測時に用いる投影パターンをより高い密度で投影できるようにした技術を提供する。
【解決手段】
情報処理装置は、複数の計測線パターンと、当該複数の計測線パターンに対して複数の交点を有するとともに交点間の形状が特徴付けられる基準線パターンとを含むパターンデータを生成し、当該生成されたパターンデータに基づく投影パターン光が投影された被写体を撮像した撮像画像を入力し、当該撮像画像から交点を抽出し、撮像画像における基準線パターン上の交点間に特徴付けられた形状の一次元的又は二次元的な配置を示す情報を同定情報として取得し、当該同定情報に基づいてパターンデータにおける基準線パターンと撮像画像における基準線パターンとを対応付け、当該対応付け結果に基づいてパターンデータにおける計測線パターンと撮像画像における計測線パターンとを対応付ける。
(もっと読む)
光学式エンコーダおよび干渉計測装置
【課題】高精度な光学式エンコーダを提供する。
【解決手段】本発明のエンコーダは、移動可能な格子スケールと、前記格子スケールに照射した光束の反射光または透過光を光電変換して、互いに位相差が異なるN相(Nは6以上の整数)の周期信号を生成する複数の受光素子と、前記受光素子で生成された各相の前記周期信号に対してM組(Mは2以上の整数)の係数群を乗算し、該係数群を乗算して得られた値の総和からM相の正弦波状周期信号を生成する増幅器とを有する。
(もっと読む)
反射型光学センサおよび画像形成装置
【課題】トナーパターンのトナー濃度や位置を、より高精度に検出できる反射型光学センサを提供する。
【解決手段】発光部E1〜E9を配列した照明系と、受光部D1〜D9を配列された受光系と、共に平凸形状の照射用マイクロレンズアレイLE1〜LE9および受光用マイクロレンズアレイLD1〜LD9とを有し、照射用マイクロレンズの光軸は、対応する発光部E1〜E9の中心を通り発光部に垂直な発光部軸に平行で、この発光部軸に対して受光系側へ所定距離ずれ、各受光用マイクロレンズLD1〜LD9の光軸は、対応する受光部の中心を通り受光部に垂直な受光部軸に対して平行で、受光部軸に対して、照明系に近づく側もしくは遠ざかる側にずれており、照射用マイクロレンズと受光用マイクロレンズとは、レンズ面積、レンズ面曲率半径、レンズ肉厚が、何れも互いに異なり、受光用マイクロレンズのレンズ面積が照射用マイクロレンズのレンズ面積より大きい。
(もっと読む)
端子圧着不良検出装置
【課題】 端子取付部の画像を撮影して端子圧着不良の検出を行うに当たって、画像の位置調整の処理を簡単化する。
【解決手段】 端子付き電線4を移動させたまま端子部の画像データをカメラ2で撮影し、取得した画像データについて、所定の枠内において、電線を横切る方向に、複数回平行に走査して各ライン毎に輝度の重心点を求め、各重心点に基づいて第1の座標軸を決定する。また、前記画像データ全体について、電線を横切る方向に、複数回平行に走査してライン毎に、隣接する画素間の輝度の差を積算して、積算値の変化パターンを生成し、該変化パターンを前記第1の座標軸方向に移動させながら、基準パターンと比較し、最も一致する位置に基づいて、前記第1の座標軸と直交する第2の座標軸を決定する。そして、両座標軸を基準として前記画像データの位置を調整し、端子圧着状態の良否判定を行う。
(もっと読む)
位置姿勢計測装置、位置姿勢計測方法、及びプログラム
【課題】距離画像の欠損領域(無効領域)を特徴として利用した、対象物体の3次元位置姿勢の推定を可能にすることを目的とする。
【解決手段】3次元形状が既知である対象物体の3次元の位置姿勢を計測する位置姿勢計測装置であって、対象物体までの距離情報が画素値として保持された距離画像を撮像する撮像部と、距離画像から、撮像部と対象物体との距離情報が取得できない領域である無効領域を選別する選別部と、無効領域の特徴を示す特徴量を抽出する抽出部と、距離画像を撮像した時の撮像部と対象物体との相対的な位置姿勢を示す情報と、撮像部により複数の異なる方向から撮像された距離画像ごとの特徴量とを関連付けて記憶する記憶部と、抽出部により抽出された特徴量に対応する記憶部に記憶された特徴量を求めて、当該求められた特徴量と関連付けられた位置姿勢を示す情報から対象物体の3次元の概略位置姿勢を決定するする概略位置姿勢決定部と、を備える。
(もっと読む)
画像処理装置、画像処理方法および画像処理プログラム
【課題】テンプレートマッチングによる対応点探索を行なうステレオマッチング手法において、隠れ領域が存在する場合でも簡易な処理で精度の高いマッチングを行なう。
【解決手段】境界画素指定部21は、被写体の影響によって第1の画像および第2の画像のいずれかにおいて写っていない領域である隠れ領域といずれにも写っている領域である非隠れ領域との境界に対応する1または複数の画素である境界画素を第1の画像および第2の画像においてそれぞれ指定する。相関計算範囲決定部22は、第1の画像および第2の画像における各境界画素に基づいて相関計算範囲を決定する。相関計算部13は、第1の画像における複数のブロック画像と第2の画像における複数のブロック画像との間のすべてまたは一部の組み合わせごとに、相関計算範囲に従って画素値の相関係数を算出する。
(もっと読む)
外観検査装置
【課題】太陽電ウエハの3次元形状を正確かつ高速に算出する。
【解決手段】第1及び第2形状算出部24,34は、撮像部20により所定のフレームレートで連続的に撮像された複数枚の光切断線画像の画像データを基に、ウエハ50の表面の3次元形状データを算出する。ここで、第1形状算出部24は、カメラ21〜23が現フレームの光切断線画像を撮像する期間に、1つ前のフレームに探索処理を行うと同時に、2つ前のフレームの光切断線画像に重心算出処理を行う。
(もっと読む)
検査システム、その方法及びプログラム
【課題】作業スペースと設備投資との問題を解決し、外観検査の自動化を行うことが可能な検査システム及びその方法を提供する。
【解決手段】本発明の検査システムは、固定されておらず、不確定な位置で検査対象の外観を撮像し撮像画像とする撮像装置と、予め検査対象を撮像した参照画像を記憶する記憶部と、撮像装置の撮像座標上の撮像画像を、参照画像を撮像した際の参照撮像座標上に座標変換し、変換した結果を比較画像として出力する画像処理部と、参照画像と比較画像とを比較するマッチング処理部とを備える。
(もっと読む)
カメラ
【課題】被写体が所定の条件を満たしたときには被写体の有する直線部の寸法を測定し寸法測定結果を表示部に表示させ得るカメラを提供する。
【解決手段】被写体像を撮影する撮影部2と、撮影部により取得された画像信号に基く画像及びその関連情報を表示する表示部3と、撮影部により取得された画像のうち第1の方向に延びる第1の直線,第1の直線に対して直交する第2の方向に延びる第2の直線及び第3の直線を検出する直線検出部11b,11cと、第1の直線と上記第2の直線との交点となる第1のポイント,第1の直線と第3の直線との交点となる第2のポイントを検出するポイント検出部11dと、第1のポイントと第2のポイントとの間の距離を測定する測定部11eと、測定部による測定結果を表示部に表示する表示制御部3aとを備える。
(もっと読む)
機械的精度評価方法
【課題】その目的は加工機の大きさに係らず、加工ツールと加工ポイント間の相対的な変位を正確に計測することが可能な機械的精度測定方法を提供することにある。
【解決手段】加工機に取付けたカメラで真直度などの精度を測定したい部位、例えば当該加工機の加工テーブルや当該加工機の加工テーブル上に設置された被加工物の表面の画像データを撮影し、その画像データを基に当該部分の真直度や位置決め精度などの加工機の機械的精度を測定する方法。
(もっと読む)
飛翔体の三次元解析装置、およびコンピュータプログラム
【課題】 解像度が高くて画角も大きな高性能のカメラを使用することなく、高解像度を実現できる飛翔体の三次元解析装置を提供する。
【解決手段】 水平方向に離間させた二箇所から所定領域における飛翔体をステレオ撮影するための飛翔体の三次元解析装置である。前記の二箇所の各々には、複数のカメラにて構成される撮影カメラ群と、その撮影カメラ群が撮影した画像データを合成して合成画像データを作成する合成画像データ作成手段と、その合成画像データ作成手段にてそれぞれ作成された二つの合成画像データを用いて、飛翔体の三次元位置を演算するステレオ解析手段とを備える。前記の撮影カメラ群は、当該撮影カメラ群を構成する各々のカメラにおける水平方向の撮影領域が連続するとともに、垂直方向の撮影領域が同一となるように固定する。
(もっと読む)
モデル入力装置およびモデル生成システム
【課題】高精度に対象物の動立体モデル(三次元動画像データ)を取得することができるモデル入力装置およびモデル生成システムを提供する。
【解決手段】モデル入力装置は、対象物の色彩データを取得する撮影部10cと、可視光以外の波長を有する光を前記対象物へ照射する照射部10aと、前記対象物で反射された前記光を受光する受光部10bと、内部に前記撮影部と前記照射部と前記受光部とを備えるユニット10と、前記撮影部で得られた前記色彩データと前記受光部で得られた反射光に関する情報とをコンピュータへ出力可能なインターフェースと、を備える。
(もっと読む)
電子天秤
【課題】 計量皿に載置された被測定物の単位重量あたりに対する天秤ビームの他端部が変位する変位の量が小さくても、天秤ビームの他端部の変位を正確に算出することができる電子天秤を提供すること。
【解決手段】 一端部に被測定物15が載置される計量皿9が連結され、他端部に電磁力発生装置6、7が連結される天秤ビーム4と、光束を出射する発光部2と、光束を受光する受光面21、22、23、24を有する受光部Rとを備える光学的位置センサ20と、受光部Rの受光面21、22、23、24で受光された受光量情報に基づいて、天秤ビーム4の他端部の変位を算出する制御部5とを備える電子天秤1であって、受光部Rは、4個以上に分割された受光面21、22、23、24を有し、制御部5は、4個以上の受光量情報に基づいて、天秤ビーム4の他端部の変位を算出する。
(もっと読む)
奥行推定装置、奥行推定方法および奥行推定プログラム
【課題】複数のカメラ映像間でオクルージョンが発生し対応点が存在しない場合や、一様な被写体で対応点が複数存在する場合でも、奥行値の誤推定を軽減することが可能な奥行推定装置を提供する。
【解決手段】奥行推定装置1は、基準映像と複数の隣接映像とを入力する映像入力手段10と、仮定奥行値ごとに、基準映像の画素の画素値と、当該画素の仮定奥行値の視差に対応する隣接映像の画素の画素値との差分絶対値である隣接映像画素差分値を演算する対応画素差分演算手段20と、閾値により隣接映像画素差分値の平均値または最小値を選択差分値として決定する差分値決定手段30と、選択差分値を仮定奥行値と基準映像の画素位置とに対応付けて記憶する記憶手段40と、画素位置ごとに選択差分値が最小となる仮定奥行値を記憶手段40において探索して奥行値を決定する奥行値決定手段60と、を備えることを特徴とする。
(もっと読む)
ステレオ映像内の視差探索範囲を求めるための方法及びシステム
【課題】シーンのステレオ画像のセットに基づいて該シーンの現在のステレオ画像のための視差探索範囲を求めるためのシステム及び方法を提供する。
【解決手段】ステレオ画像のセットからステレオ画像のサブセットを選択するステップであって、該サブセットは現在のステレオ画像及び少なくとも1つの隣接するステレオ画像を含み、該隣接するステレオ画像は現在のステレオ画像に時間的に隣接する、選択するステップと、ステレオ画像のサブセット内のステレオ画像毎に視差ヒストグラムを求めるステップであって、1組の視差ヒストグラムを形成する、求めるステップと、1組の視差ヒストグラム内の視差ヒストグラムの重み付けされた和として重み付け視差ヒストグラムを求めるステップと、重み付け視差ヒストグラムから視差探索範囲を求めるステップとを含む。
(もっと読む)
画像処理方法、画像処理装置、プログラムおよび記録媒体
【課題】 タイヤの種類、タイヤ表面の状態および照明の位置関係に依存することなく、凹凸欠陥を検出することができ、検査の安定化を図ることができる画像処理方法、画像処理装置、プログラムおよび記録媒体を提供する。
【解決手段】 制御部12は、第1の方向、たとえばタイヤ回転方向での各画素の濃度を微分した微分値に基づいて、欠陥候補が大規模凹凸欠陥であるか否かを、凹凸の種類ごとに予め定める専用しきい値に基づいて判定する。次に、画像を構成する画素のうち最小の濃度の画素の位置を中心とする第1の方向での予め定める微分範囲について、画素の濃度を微分した微分値を加算した微分和に基づいて、小規模凹欠陥であるか否かを判定する。さらに、各画素を中心とする第1の方向での予め定める微分幅での微分値に基づいて、鋭角凹欠陥であるか否かを判定する。
(もっと読む)
画像処理方法、画像処理装置、画像処理プログラムおよび記録媒体
【課題】 画像中のブラダーグルーブを検出し、検出したブラダーグルーブを画像中から除去する画像処理方法、画像処理装置、画像処理プログラムおよび記録媒体を提供する。
【解決手段】 画像処理方法は、濃度射影変換工程と、フーリエ展開工程と、周期算出工程と、逆フーリエ展開工程と、出力工程とを含む。濃度射影変換工程では、第1画像に第1方向の濃度射影変換を行って第2画像を作成する。フーリエ展開工程では、第2画像中の第2方向に並ぶ画素の濃度値をフーリエ展開する。周期算出工程では、第1画像中の線状模様の第2方向の周期を算出する。逆フーリエ展開工程では、フーリエ展開された周波数成分から、線状模様の周期を表す周波数成分を除去し、残余の周波数成分を逆フーリエ展開して第3画像を作成する。出力工程では、逆フーリエ展開工程で作成された第3画像を表す除去済画像情報を出力する。
(もっと読む)
121 - 140 / 639
[ Back to top ]