
Fターム[2F065QQ27]の内容
光学的手段による測長装置 (194,290) | 信号処理 (28,761) | 信号の加算 (639)
Fターム[2F065QQ27]に分類される特許
201 - 220 / 639
カメラ校正装置、カメラ校正方法、カメラ校正プログラムおよびそのプログラムを記録した記録媒体。
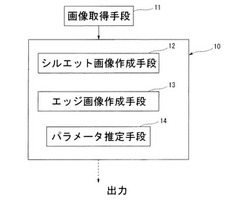
【課題】カメラの内部・外部パラメータの計測を容易化する。
【解決手段】シルエット画像作成手段12は、カメラなどの画像取得手段11から入力された画像から物体の写っている領域を抽出したシルエット画像を作成する。パラメータ推定手段14は、予め用意された物体の変化タイプを任意の確率に従って選択し、該選択された変化タイプに応じた状態候補を生成する。この状態候補に基づいて、該状態候補と同じカメラ内部・外部パラメータを有する仮想カメラに投影し、前記シルエット画像をシミュレートしたシミュレーション画像を生成する。この両画像の比較結果と、事前知識に基づく対象自体の確からしさの判定結果とを積演算した評価値を求める。この評価値から状態候補を最終的な変化状態として受け入れるか否かを判断する。受け入れた変化状態からカメラの内部・外部パラメータを推定する。
(もっと読む)
シーン補間及び登録性能評価のための2D電子光学的画像及び3D点群データの融合
共通シーンの改善された可視化及び登録処理の成功裏の補間のための3D点群と2D画像を組み合わせる方法及びシステムについて開示している。結果として得られた融合データは、オリジナルの3D点群からの情報及び2D画像からの情報の組み合わせを有する。オリジナルの3D点群データは、カラーマップタグ化処理に従ってカラー符号化される。異なるセンサからのデータを融合することにより、結果として得られるシーンは、戦争空間認識、目標識別、レンダリングされたシーンにおける変化検出及び成功裏の登録の決定に関連する有用な複数の属性を有する。  (もっと読む)
(もっと読む)
カメラの自動キャリブレーション装置及び自動キャリブレーション方法

【課題】本発明は、カメラの自動キャリブレーション装置及び自動キャリブレーション方法に係り、カメラの位置や向きのズレに起因する撮影画像の画像処理時の計測誤差の発生を防止することにある。
【解決手段】撮影対象として所定基準面を基準にして面対称な特徴点の組を複数有する面対称物体を含むカメラの撮影画像から、面対称物体の面対称特徴点の少なくとも2組を抽出し、その抽出される面対称物体の面対称特徴点の少なくとも2組に基づいて、所定基準面を特定する基準面パラメータ、及び、該面対称物体の面対称特徴点の少なくとも2組を含む面対称構成平面を特定する構成面パラメータを導出する。そして、その導出される基準面パラメータ及び構成面パラメータに基づいて、撮影対象とカメラとの座標系の対応を示す回転パラメータ及び並進パラメータを更新する。
(もっと読む)
突起付長尺体測定方法
【課題】突起付長尺体の外径寸法と谷径寸法及び突起高さ寸法を容易かつ迅速に測定可能な突起付長尺体測定方法を提供する。
【解決手段】多数の突起11を有する突起付長尺体10を軸心L0 方向に走行させ、その長尺体10の軸心L0 を含む一縦断面Sを挟んで反射型二次元変位第1センサ1と反射型二次元変位第2センサ2とを対面状に配設して、第1センサ1によって上記長尺体10の上記一縦断面Sの一方側における第1狭小範囲内を測定すると共に第2センサ2によって長尺体10の一縦断面Sの他方側における第2狭小範囲を測定して、長尺体10の外径寸法と谷径寸法と突起高さ寸法とを演算手段により演算する。
(もっと読む)
信号処理装置及び計測装置
【課題】
安価で信頼性の高い信号処理装置を提供する。
【解決手段】
本発明の信号処理装置は、被計測物の位置を計測する計測装置に用いられる信号処理装置1であって、被計測物の位置に応じた信号の位相を時間に対して回帰することにより、被計測物の速度を算出する回帰演算器19と、第1のサンプリング時における被計測物の位置に回帰演算器19で算出された速度を加算することにより、第2のサンプリング時における被計測物の予測位置を求める予測演算手段(加算器22)と、位相演算手段で求められた第2のサンプリング時の計測位相から予測位置を減算して予測誤差を求める誤差演算手段(減算器23)と、桁拡張した予測誤差を予測位置に加算することにより、第2のサンプリング時における被計測物の位置を求める位置演算手段(加算器21)とを有する。
(もっと読む)
ウェーハを検査するためのシステム及び方法
【課題】 ウェーハを検査するための方法およびシステム。
【解決手段】 このシステムは、光検査ヘッド、ウェーハテーブル、ウェーハスタック、XYテーブルおよび振動絶縁装置を含む。光検査ヘッドは、複数の照明器、画像収集装置、対物レンズおよび他の光学部品を含む。このシステム及び方法は、明視野画像、暗視野画像、3D形状画像および検査画像の収集を可能にする。収集画像は、画像信号に変換され、かつ処理のためにプログラマブルコントローラに伝送される。ウェーハが動いている間、検査が実行される。収集画像は、ウェーハ上の欠陥を検出するための基準画像と比較される。基準画像を作り出すための例示的な基準作成プロセスおよび例示的な画像検査プロセスもまた、本発明によって提供される。基準画像作成プロセスは、自動プロセスである。
(もっと読む)
ウェーハを検査するためのシステム及び方法
【課題】 半導体ウェーハを検査するための検査システム。
【解決手段】 この検査システムは、広帯域照明を供給するための照明設定を備える。広帯域照明は、異なるコントラスト、例えば明視野および暗視野広帯域照明であることができる。検査システムは、第1の画像収集装置および第2の画像収集装置を更に備え、半導体ウェーハが動く間、各々が半導体ウェーハの画像を収集するために広帯域照明を受け取るために構成される。システムは、広帯域照明の平行を可能にするための複数のチューブレンズを備える。システムはさらに、安定化メカニズムおよび対物レンズ組立体を備える。システムは、細線照明エミッタ、および半導体ウェーハの3次元画像をそれによって収集するために細線照明を受け取るための第3の画像収集装置を更に備える。システムは、第3の画像収集装置が、複数の方向に半導体ウェーハから反射される照明を受け取ることを可能にするための反射器組立体を備える。
(もっと読む)
計測装置及び計測方法
【課題】撮像素子を用いた被写体の変異量計測において、非移動被写体の減算演算を簡素化し、減算精度の向上により測定精度を向上させる。
【解決手段】第1の画像を構成する第1の画素群と第2の画像を構成する第2の画素群とが所定の配列形態にしたがって交互に配列された単一の撮像素子を用いて、それぞれ露光時間の異なる第1の画像と第2の画像とを取得し、第1の画像と第2の画像との差分に基づいて変異する被写体を検出し、第1の画像と第2の画像との差分に基づいて変異する被写体の画像内の位置、移動速度、移動方向、及び面積の変化量のうち少なくとも1つを算出する算出して出力する。
(もっと読む)
ウェブ基準を使用して位相固定したウェブ位置信号
ウェブの移動エンコーダ信号を検知したウェブ基準信号に位相固定すること含む、ウェブ位置の決定を向上させるための手法。基材の長手方向軸に沿って配置された基準が検知され、対応するセンサ信号が生成される。推定ウェブ位置は、1つ以上のエンコーダ信号によって提供される。センサ信号とエンコーダ信号との間の位相差が計算され、位相差に基づいてウェブ位置の誤差が決定される。ウェブ位置の誤差信号は、ウェブ位置の決定の精度を向上させるエンコーダ信号を調整するためにフィードバックすることができる。  (もっと読む)
(もっと読む)
フォーカシング制御装置および非接触測定装置
【課題】測定面からの反射光の光量に影響されることなく、安定したオートフォーカスができるフォーカシング制御装置を提供する。
【解決手段】フォーカスエラー信号Sは、ピンホール方式で生成される。信号生成部9からの出力がフォーカスエラー信号Sか否かの判断では、初めにデフォルトのしきい値として第1しきい値N1および第2しきい値N2が用いられる。この判断でフォーカスエラー信号Sと判断されない場合は、第1しきい値N1を第3しきい値N3に、第2しきい値N2を第4しきい値N4に補正して再度フォーカスエラー信号Sの判断をする前に、信号生成部9からの出力の波形を評価する。
(もっと読む)
3次元物体姿勢・位置検出装置、方法、およびプログラム
【課題】参照点等を与えることなく、3次元物体の位置(撮影したカメラから3次元物体の予め定められた点までの距離)を高精度に検出することを可能とした3次元物体姿勢・位置検出装置を提供することである。
【解決手段】提案する3次元物体姿勢・距離位置装置では、2次元画像の対象物中心点の位置を、その2次元画像と、その2次元画像の姿勢に加えた組み合わせとして作成した辞書データを記憶装置8内に有するために、事前に参照点や図形を辞書データの各2次元画像に入力することなく、また、ステレオカメラ16−1、16−2を用いることにより、認識対象の3次元姿勢および対象物中心点までの距離を容易に認識することができる。
(もっと読む)
大型部品の寸法測定装置および寸法測定方法
【課題】 大型軸受の内外輪などの大型部品の径を、容易に、精度良く、非接触で測定できる大型部品の寸法測定装置を提供する。
【解決手段】 ヘッド支持フレーム1と、ヘッド支持フレーム1の両端にそれぞれ設けられた一対のレーザ測長ヘッド2,3と、レーザ光L1,L2を両レーザ測長ヘッド2,3の対向方向に反射させる一対の角度調整ミラー4,5と、反射板6と、受光信号の処理および投光の制御を行う制御手段7とを備える。制御手段7は、受光信号からレーザ測長ヘッド2,3間の距離を測定するヘッド間距離測定手段12と、測定物で反射されたレーザ光L1,L2から測定物と各レーザ測長ヘッド2,3との間の距離を検出する測定物・ヘッド間距離測定手段13と、ヘッド間距離測定手段12および測定物・ヘッド間距離測定手段13の測定結果から測定物の寸法を計算する測定値計算手段14とを有する。
(もっと読む)
測定検査装置及び方法
【課題】被測定体としてのタイヤ構成部材の大小に関らず形状の検査の精度に差が生じない測定検査装置及びその方法を提供する。
【解決手段】タイヤの構成部材を被測定体として一定長さの帯状又は線状の光を照射して、当該光の光照射部からの反射光を受光して被測定体の形状を測定するセンサと、このセンサの出力により被測定体の形状を演算する形状処理手段を備えた測定検査装置により、被測定体の別部位を個別に測定する複数個の各センサの出力で得られる各被測定体の形状を形状処理手段で合成し、形状処理手段により合成された被測定体の合成形状と予め用意された基準形状とを判定手段により比較して形状の良否を判定する。
(もっと読む)
紡糸口金検査装置
【課題】紡糸口金に穿設された複数個の吐出孔を同時に検査して孔内に残留する異物の有無を一孔ごとに検出するのではなく、多数の吐出孔に対して一度に孔内異物が検出でき、そのような検査が可能な高精度な検査装置であっても、工場内の振動などによって検査精度に影響を及ぼさないようにする必要があり、これによって、多大な時間を要することなく短時間かつ確実に孔内異物を検査できる装置を提供する。
【解決手段】スキャンカメラを用いて、紡糸口金を走査することにより、高解像度の複数の画像データ群を取得し、これら画像データ群を合成して作成した合成画像データから紡糸口金に穿設された多数の吐出孔群のそれぞれに対して孔内異物の存在の有無を画像処理を用いて一度に検出し、さらに振動により吐出孔画像に異常が起こらないようにする為、振動計を用いた振動検知と、撮影した画像に異常があった場合に面積値判別によって振動の有無を検知する、振動検知機能付き紡糸口金の孔内異物の検査装置とする。
(もっと読む)
撮像装置
【課題】基準画像または比較画像の出力に対して遅れることなく、対象物までの距離を基準画像および比較画像からリアルタイムで求めることができる撮像装置を提供する。
【解決手段】マッチング処理部40は、2つの各撮像部から順次入力される第1および第2の画素データ間の差分を合計した差分積算値を入力ラインごとに算出する第1の処理部440と、2つの各撮像部からnライン遅延して順次入力される第1および第2の画素データ間の差分を合計した差分積算値を入力ラインごとに算出する第2の処理部450と、第1のライン処理部440で求めた積算値を垂直方向に積算した値から第2のライン処理部450で求めた積算値を垂直方向に積算した値を引いたSADを求める差分絶対値和算出部460とを備え、SADに基づいて基準画像中の照合エリアに対応する対象エリアを求める。
(もっと読む)
複合メディア合成装置及び複合メディア表示システム及び複合メディア合成方法及び複合メディア合成プログラム
【課題】3次元形状を計算することが困難な箇所がある領域の3次元地図として、有用なものを作成することを目的とする。
【解決手段】複合メディア合成装置120の3次元地図作成部123は、移動可能な計測装置に搭載されたカメラ、レーザスキャナ、ステレオカメラの出力するデータの少なくともいずれかを用いて計測装置の周辺領域の3次元地図を構築する。メディア合成部125は、カメラの出力する映像データから、3次元地図作成部123が3次元地図を作成できない領域(カメラやステレオカメラで撮影しても映像の精度が悪くなる領域、レーザスキャナのレーザが到達する範囲外の領域)以外の領域の映像を抽出し、抽出した映像と3次元地図作成部123が作成した3次元地図とを合成する。
(もっと読む)
植物の葉片の成長を測定するための方法およびそれに適した装置
本発明は、葉片の成長を測定するための方法および装置に関する。この方法は、a)撮影システムを較正するステップと、b)1枚の葉片の少なくとも2枚の画像を撮像するステップと、c)画像データを処理するステップであって、i)しきい値セグメント化によって葉片をセグメント化することと、ii)複数回の形態学的侵食を行うことと、iii)保管容器の縁部を除去するためにエッジ補正することとを含むステップと、d)3D再構成:ステレオアルゴリズムによって視差マップを生成し、事前に特定された較正パラメータに基づいて、視差マップから3D表面モデルを計算するステップと、e)事前に取得された表面モデルを平滑化するステップと、f)面積値の時系列から成長率を算出するステップとによって特徴付けられる。この装置は、少なくとも1台のカメラと、照明ユニットと、カメラおよび(赤外線)照明用のX/Y平面でのスライドテーブルと、葉片用の保管容器と、電子的解析および制御ユニットとを備える。 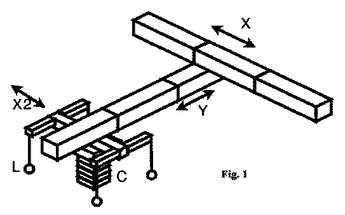 (もっと読む)
(もっと読む)
レーザスキャナを伴う関節式測定アーム
【課題】レーザスキャナを最適に配置し、スキャナの精度を確保する。
【解決手段】座標測定機器は、第1の端10と、第2の端50と、それらの間の複数の継ぎ合わせアームセグメントと、を有する関節付きアーム20を含む。各アームセグメントは、少なくとも1つの回転軸を定める。レーザスキャナアセンブリは、アームの第2の端に結合され、関節付きアームの最後の回転軸を中心に回転可能である。レーザスキャナアセンブリは、レーザと画像センサとを含む。レーザは、最後の回転軸L1を挟んで画像センサの反対側に位置決めされる。
(もっと読む)
光学式変位計
【課題】 測定精度を低下させることなく、測定できる範囲をロングレンジ化した光学式変位計を提供する。
【解決手段】 基準面による反射光及び検査対象物による反射光からなる干渉光を分光する分光手段と、分光後の干渉光の波数に関する光強度分布を生成する光強度分布生成手段と、波数に関する光強度分布を波数に対する光強度の空間周波数に関する光強度分布に変換し、極大点を抽出する光強度極大点抽出部53と、極大点の空間周波数に対応する周波数成分の位相を決定する位相決定部56と、上記位相に基づいて検査対象物の変位量を判定する変位量判定部57により構成される。位相決定部56は、周波数成分の相対位相を判定する相対位相判定部71と、相対位相の判定結果及び過去の判定結果に基づいて相対位相をつなぎ合わせ、絶対位相を求める絶対位相算出部73と、リセット指示に基づいて絶対位相の基準点を更新する位相基準更新部74とを有する。
(もっと読む)
物理量センサおよび物理量計測方法
【課題】物体の変位や速度を高い分解能で計測し、計測に要する時間を短縮する。
【解決手段】物理量センサは、物体10にレーザ光を放射する半導体レーザ1と、発振波長が増加する第1の発振期間と発振波長が減少する第2の発振期間のうち少なくとも一方が繰り返し存在するように半導体レーザ1を動作させるレーザドライバ4と、半導体レーザ1から放射されたレーザ光と物体10からの戻り光との自己結合効果によって生じる干渉波形を含む電気信号を検出するフォトダイオード2および電流−電圧変換増幅部5と、電流−電圧変換増幅部5の出力信号に含まれる干渉波形の周期を干渉波形が入力される度に計測する信号抽出部7と、信号抽出部7が計測した個々の周期に基づいて物体10の変位と速度のうち少なくとも一方を算出する演算部8とを備える。
(もっと読む)
201 - 220 / 639
[ Back to top ]