
Fターム[2F065QQ43]の内容
光学的手段による測長装置 (194,290) | 信号処理 (28,761) | 統計処理 (2,372) | ヒストグラム作成 (252)
Fターム[2F065QQ43]に分類される特許
21 - 40 / 252
対象領域抽出装置
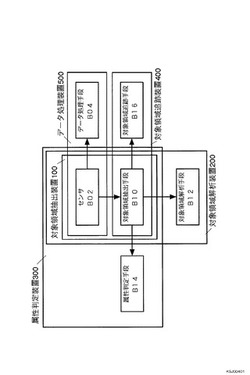
【課題】 距離情報データに含まれるノイズを除去等する。
【解決手段】 対象領域抽出手段B10は、センサB02から得られる輝度情報データに基づいて、所定以上の輝度の存在する隣接画素数がしきい値以下の部分を削除するための輝度情報マスクを生成する。輝度情報マスクを距離情報データに重ね合わせ、輝度情報マスクに重複する領域の距離情報データだけを抽出する。
(もっと読む)
欠陥検査装置およびその方法

【課題】同一パターンとなるように形成された2つのパターンの対応する領域の画像を比較して画像の不一致部を欠陥と判定するパターン検査装置において、膜厚の違いなどから生じるパターンの明るさむらの影響を低減して、高感度なパターン検査を実現する。また、多種多様な欠陥を顕在化でき,広範囲な工程への適用が可能なパターン検査装置を実現する。
【解決手段】同一パターンとなるように形成された2つのパターンの対応する領域の画像を比較して画像の不一致部を欠陥と判定するパターン検査装置を、複数の検出系とそれに対応する複数の画像比較処理方式を備えて構成し、又、異なる複数の処理単位で比較画像間の画像信号の階調を変換する手段を備えて構成し、画像間の同一パターンで明るさの違いが生じている場合であっても、正しく欠陥を検出できるようにした。
(もっと読む)
エッジ位置検出装置、パターン測定装置、エッジ位置検出方法およびパターン測定方法
【課題】パターン要素のエッジ位置を再現性よく求める。
【解決手段】パターン測定装置では、対象物上のパターン要素を示す画像において当該パターン要素の一のエッジに交差するx方向における輝度プロファイルが取得される。続いて、輝度プロファイルにおいてエッジを示す傾斜部に含まれる複数の画素位置のうち、x方向に連続するとともに当該複数の画素位置よりも少ない画素位置を対象位置群として、複数通りの対象位置群71,72を決定し、各対象位置群71,72に含まれる画素位置における輝度プロファイルの輝度から高次の近似式が求められる。そして、複数通りの対象位置群71,72にそれぞれ対応する複数の近似式において、所定のエッジ輝度T0となる傾斜部内の位置を複数のエッジ候補位置として取得し、複数のエッジ候補位置に基づいて最終的なエッジ位置が求められる。これにより、パターン要素のエッジ位置を再現性よく求めることができる。
(もっと読む)
欠陥検査方法及びその装置
【課題】半導体ウェハ上に形成されたチップ内の直接周辺回路部の近辺に存在する致命欠陥を高感度に検出することができる欠陥検査装置及びその方法を提供する。
【解決手段】被検査対象物を所定の光学条件で照射する照明光学系と、被検査対象物からの散乱光を所定の検出条件で検出して画像データを取得する検出光学系とを備えた欠陥検査装置において、前記検出光学系で取得される光学条件若しくは画像データ取得条件が異なる複数の画像データから領域毎に複数の異なる欠陥判定を行い,結果を統合して欠陥候補を検出するようにした。
(もっと読む)
外観検査装置及び外観検査方法
【課題】基板の表面の高さを求める。
【解決手段】外観検査装置は、基板と該基板に実装されている部品とを備える被検査体12を撮像して得られる被検査体画像を使用して被検査体12を検査する。外観検査装置は、被検査体12にパターンを投射する投射ユニットと、パターンが投射された被検査体12のパターン画像に基づいて被検査体12の表面の高さ分布を求める高さ測定部と、を備える。高さ測定部は、高さ分布における高さ値の出現頻度に基づいて基板表面の高さを特定する。
(もっと読む)
形状測定方法及び形状測定装置
【課題】ダイナミックレンジの広いZ方向範囲の高速な測定及びこれによる測定時間の短縮。
【解決手段】光源から被測定対象までの第1光路長と光源から参照面までの第2光路長との光路長差によって変化する被測定対象の干渉光強度分布画像を、撮像手段で撮像する第1の工程と、第1光路長と第2光路長の光路長差を光路長差変更手段で全走査区間に亘って変化させながら、全走査区間内に部分的に設定された複数の測定区間の干渉光強度分布画像を画像記憶手段に順次記憶する第2の工程と、画像記憶手段に記憶された各測定区間の干渉光強度分布画像の各測定位置における光路長差の変化に伴う干渉光強度の変化を示す干渉光強度列から、全走査区間における干渉光強度列のピーク位置を求め、このピーク位置から被測定対象の各測定位置における光軸方向の位置を求める第3の工程とを有する。
(もっと読む)
画像測定装置、画像測定方法及び画像測定装置用のプログラム
【課題】 複数のワークについて、輪郭の不一致度合いを容易に識別することができる画像測定装置を提供する。
【解決手段】 ワーク画像A2からエッジを抽出するエッジ抽出手段と、ワーク画像A2及び予め保持されたマスター画像A1を比較する画像比較手段と、比較結果に基づいて、ワーク画像A2のエッジ位置とこのエッジ位置に対応するマスター画像A1上の位置との変位量を示す誤差を算出する誤差算出手段と、複数のワーク画像A2について算出された誤差の統計情報をエッジ位置ごとに算出する統計情報算出手段と、統計情報を、その値に応じた表示態様でワーク画像A2又はマスター画像A1から抽出されたエッジ位置に沿って表示する統計情報表示手段により構成される。
(もっと読む)
画像検査方法および画像検査装置
【課題】所定の繰り返しピッチで連続して生産される部品の画像検査において,その画像検査の実施状態を知ることが可能となる技術を提供する。
【解決手段】画像検査装置10において,マッチング処理部141は,入力された検査画像のフレームから部品を検出し,検出された部品の位置と相関値とを取得する。フレーム間部品対応検出部151は,連続する2つのフレーム間で類似する部品の対応を検出する。対応部品位置差分算出部152は,対応部品間の検出位置の差分である対応部品位置差分を算出する。対応部品位置差分統計部153は,対応部品位置差分を統計した移動量ヒストグラムを作成する。部品移動量推定部155は,移動量ヒストグラムから連続するフレーム間での部品の移動量を推定する。画像検査実施状態判定部150は,部品の移動量の推定結果から,画像検査が適切に実施されているか否かを判定する。
(もっと読む)
共焦点顕微鏡装置
【課題】本発明では、正確に測定対象平面を検出すると共に、測定時間の短縮が可能な共焦点顕微鏡装置を提供することを目的とする。
【解決手段】観察試料8の観察面に光を集束する少なくとも1つの対物レンズ7と、観察試料8と対物レンズ7との距離を所定間隔で変化させるZレボルバ16と、観察試料8と対物レンズ7との距離に応じて所定間隔を設定する測定条件情報指示部19と、設定された所定間隔で上記距離を変化させるようにZレボルバ16を駆動制御するZ駆動制御部22と、観察面からの反射光を検出する光検出器12と、上記所定間隔の距離毎に観察面上に光を二次元走査して光検出器12で検出される検出信号により平面画像を生成し、生成された複数の平面画像を用いて三次元画像を生成するコントローラ2を有する共焦点顕微鏡装置100により、上記課題の解決を図る。
(もっと読む)
位置姿勢計測装置、その処理方法及びプログラム
【課題】2次元画像上における画像特徴と3次元形状モデルを構成する幾何特徴とを対応付け、その結果に基づいて物体の位置及び姿勢の計測を行なう。
【解決手段】位置姿勢計測装置は、3次元形状モデルを保持するモデル保持手段と、物体の位置及び姿勢を示す概略値を取得する手段と、撮像装置により撮像された物体の2次元画像を取得する手段と、概略値に基づいて3次元形状モデルにおける幾何特徴を2次元画像上に投影し、当該2次元画像上に投影された3次元形状モデルの幾何特徴の方向を算出する手段と、2次元画像から画像特徴の方向を算出する手段と、算出された画像特徴の方向と、3次元形状モデルから算出された幾何特徴の方向とを比較することにより、画像特徴と幾何特徴とを対応付ける手段と、当該対応付けられた画像特徴と幾何特徴とにおける距離に基づいて概略値を補正することにより物体の位置及び姿勢を算出する位置姿勢算出手段とを具備する。
(もっと読む)
欠陥検出装置および欠陥検出方法、制御プログラム、可読記憶媒体
【課題】転位や積層欠陥などの結晶欠陥を容易かつ精度よく検出する。
【解決手段】単結晶基板上に化合物半導体層をエピタキシャル成長させたエピタキシャル成長基板17の上方より励起光を照射して励起した後に、フォトルミネッセンスによる発光強度のマッピングをエピタキシャル成長基板全体に渡って行う座標変換手段としてのXY座標変換手段112と、座標変換手段112により座標に分割された複数のピクセルのそれぞれとこれに隣接する複数ピクセルとの差を用いて、欠陥検出すべきピクセルが欠陥ピクセルかどうかを順次検出する欠陥検出手段113とを有している。
(もっと読む)
ケーブル位置検出装置、ケーブル位置検出方法及びケーブル位置検出プログラム
【課題】カメラにより撮影された画像からケーブルを効率的に検出すること。
【解決手段】可視カメラ及び赤外線カメラによりそれぞれ撮影されたケーブルの可視画像及び赤外線画像を入力し、可視画像と赤外線画像との各画素の輝度の相違量に基づいて、ケーブルの位置を検出する。
(もっと読む)
画像処理システム及び位置測位システム
【課題】位置決めのための風景画像認識技術に利用される効果的な参照データの作成に適した画像処理システムとそのような参照データを用いた位置測位システムを提供する。
【解決手段】車両からの風景を撮影した撮影画像に基づいて風景画像の認識を行う際に利用される参照データを作成する画像処理システム。車両からの風景を撮影した撮影画像の類似度を算出して、各撮影画像に類似度を付与し、互いに類似度が相違する処理対象撮影画像を有用撮影画像として選択し、この有用撮影画像から画像特徴点データを生成して、参照データとしてデータベース化する。
(もっと読む)
オブジェクト領域とグラウンド領域とを区別する方法及び3次元形状測定方法。
【課題】領域区別方法及びそれを用いた3次元形状測定方法を提供する。
【解決手段】このような3次元形状測定方法は測定対象物が配置された基板に向かって光を照射し測定対象物が配置された基板から反射された光を受光してイメージを取得し、取得されたイメージの検査領域のうち、測定対象物が位置するオブジェクト領域と検査領域のうちオブジェクト領域を除いたグラウンド領域とを設定し、測定対象物が配置された基板に向かってパターン光を照射し測定対象物が配置された基板から反射されたパターン光を受光してパターンイメージを取得し取得されたパターンイメージを用いて検査領域の各地点における測定対象物の高さを取得し、設定されたグラウンド領域の高さを測定対象物に対するグラウンド高さに設定することを含む。
(もっと読む)
ターゲット投影装置及びターゲット投影方法
【課題】測定対象に投影されたターゲットが検出し難い場合に、投影用ターゲット画像を補正して、再度投影できるターゲット投影装置を提供する。
【解決手段】ターゲットTが表示された投影用ターゲット画像F1を測定対象2に投影する投影部3、投影部3から投影用ターゲット画像F1を投影して測定対象2に映されたターゲット映像F2を撮影して撮影画像F3を得る撮影部4、撮影部4で撮影された撮影画像F3からターゲットTの特徴を検出するターゲット特徴検出部62、撮影画像F3におけるターゲットTの特徴に関する所定の許容条件を記憶する許容条件記憶部54、撮影画像F3が所定の許容条件を満たすか否かを判定する許容条件判定部7、許容条件判定部7が所定の許容条件を満たさないと判定した場合には、所定の許容条件を満たすようにターゲットTの特徴を変更して投影用ターゲット画像F1を補正する画像処理部8とを備える。
(もっと読む)
ターゲット投影装置及びターゲット投影方法
【課題】測定対象に投影されたターゲットが検出し難い場合に、投影用ターゲット画像を補正して、再度投影できるターゲット投影装置を提供する。
【解決手段】カラーコードターゲットCTが表示された投影用ターゲット画像F1を測定対象2に投影する投影部3と、投影部3から投影用ターゲット画像F1を投影して測定対象2に映されたターゲット映像F2を撮影して第1の撮影画像F3Bを得、照明された測定対象2を撮影して第2の撮影画像F3Aを得る撮影部4と、第2の撮影画像F3Aに対する補色関係にある補色画像又は第2の撮影画像F3Aに対するネガ画像を形成し、形成された補色画像又はネガ画像を投影用ターゲット画像F1に合成して投影用ターゲット画像F1を補正する第1の画像処理部8とを備える。
(もっと読む)
画像処理装置、画像処理方法、画像処理プログラム、及び複眼デジタルカメラ
【課題】誤補正を抑制し、精度の高い視差マップを生成する。
【解決手段】左画像と右画像とを左画像を基準としてステレオマッチングにより対応させて視差マップを生成する。視差マップ上に注目画素を設定し、注目画素に対応する左画像上の画素(左画像注目画素)を中心とした所定サイズのウインドウを左画像に設定し、ウインドウ内に含まれる画素のうち、左画像注目画素のRGB値と近いRGB値を持つ画素を抽出し、抽出された画素の各々に対応する視差マップ上の画素の各々の視差を視差ヒストグラムにエントリして視差ヒストグラムを生成する。注目画素の頻度が所定値未満の場合には、視差ヒストグラムの最頻値の視差で、注目画素の視差を補正する。
(もっと読む)
画像処理装置
【課題】従来の2次元画像処理装置と同様に、利用可能な処理項目を提示して3次元計測の処理のシーケンスを作成させるユーザインタフェースを持つ画像処理装置を提供する。
【解決手段】2次元画像処理の複数の項目、および3次元計測処理の少なくとも1つの項目が登録された画像処理装置において、ユーザによる処理項目の選択に応じて2つの画像A0,A1を用いた処理のシーケンスを設定して実行する。2次元画像処理の項目には、画像A0に対し、あらかじめ登録されたモデル画像との一致の程度が高い領域71の代表位置を特定する処理項目が含まれる。この処理項目を含むシーケンスに組み込まれる3次元計測用の項目は、画像A1に対し、上記のモデル画像との一致の程度が高い領域81の代表位置を特定する処理と、各領域71,81の代表位置を用いて3次元計測用の演算処理を実行する処理とを実行するように設計される。
(もっと読む)
変位計測装置、方法およびプログラム
【課題】所定の位置における微小な変位を高精度かつ高効率で自動的に計測する装置、方法およびプログラムを提供する。
【解決手段】変位計測装置は、所定の位置に設けられた変位計測用の格子を含む変位計測用画像を撮影する撮影部と、変位計測用画像から格子の領域を検出して該格子領域の画像を抽出する格子領域検出部と、抽出した格子領域の画像に対してサンプリングモアレ法により格子領域の画像に対するモアレの位相分布を導出する位相分布導出部と、位相分布から求められた所定の位置における変位前後の位相差と、予め定められた格子ピッチとから所定の位置における変位を決定する変位決定部とを備える。
(もっと読む)
端子圧着不良検出装置
【課題】 端子取付部の画像を撮影して端子圧着不良の検出を行うに当たって、画像の位置調整の処理を簡単化する。
【解決手段】 端子付き電線4を移動させたまま端子部の画像データをカメラ2で撮影し、取得した画像データについて、所定の枠内において、電線を横切る方向に、複数回平行に走査して各ライン毎に輝度の重心点を求め、各重心点に基づいて第1の座標軸を決定する。また、前記画像データ全体について、電線を横切る方向に、複数回平行に走査してライン毎に、隣接する画素間の輝度の差を積算して、積算値の変化パターンを生成し、該変化パターンを前記第1の座標軸方向に移動させながら、基準パターンと比較し、最も一致する位置に基づいて、前記第1の座標軸と直交する第2の座標軸を決定する。そして、両座標軸を基準として前記画像データの位置を調整し、端子圧着状態の良否判定を行う。
(もっと読む)
21 - 40 / 252
[ Back to top ]