
Fターム[2F065QQ43]の内容
光学的手段による測長装置 (194,290) | 信号処理 (28,761) | 統計処理 (2,372) | ヒストグラム作成 (252)
Fターム[2F065QQ43]に分類される特許
41 - 60 / 252
表面計測方法及び装置
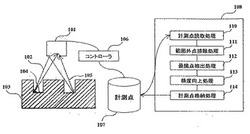
【課題】計測対象物の平面部と凹部とを正確に分離可能な表面計測装置を実現する。
【解決手段】計測点読取処理110が読み取った計測点データは範囲外点排除処理111で範囲外データが排除される。最頻点抽出処理112は抽出した計測点データから最小二乗法で直線を作成し計測点と直線との差を作成する。ヒストグラムを作成し第1の閾値と平均値を算出し閾値と平均値とが同一とみなせるかどうかを判定する。同一ではない場合、閾値以下の計測データを排除し、直線近似から再処理を行い、閾値と平均値とを再度算出する。算出した閾値と平均値とが同一とみなせるまで処理を繰り返し実行する。
(もっと読む)
外観検査装置

【課題】太陽電ウエハの3次元形状を正確かつ高速に算出する。
【解決手段】第1及び第2形状算出部24,34は、撮像部20により所定のフレームレートで連続的に撮像された複数枚の光切断線画像の画像データを基に、ウエハ50の表面の3次元形状データを算出する。ここで、第1形状算出部24は、カメラ21〜23が現フレームの光切断線画像を撮像する期間に、1つ前のフレームに探索処理を行うと同時に、2つ前のフレームの光切断線画像に重心算出処理を行う。
(もっと読む)
コンクリート画像抽出方法
【課題】背景や障害物を含むコンクリート構造物の画像から、誤差となるコンクリート面以外の背景や障害物を除去すること。
【解決手段】コンクリート構造物の色と同じ色であって、コンクリート構造物のテクスチャと同じテクスチャの画素をコンクリート候補領域として構造物抽出部131で抽出し、Cannyエッジ抽出法を用いてコンクリート候補領域から当該コンクリート候補領域内に前景として存在する障害物のエッジを抽出し、コンクリート候補領域内の各画素の輝度値を用いて中央画素に対する16個の近傍画素のテクスチャ量Skをそれぞれ計算し、最大のテクスチャ量を有する近傍画素が位置k=9にあって、16個のテクスチャ量の分散値が0.0001以上である場合に、当該中央画素をコンクリート領域として抽出し、モルフォロジーのDilation領域拡大法を用いてコンクリート領域を障害物のエッジに到達するまで拡大する。
(もっと読む)
マシンビジョン検査システム用の光学収差補正
【課題】 マシンビジョン検査システム用の光学収差補正を提供する。
【解決手段】 光学収差に対して表面高さ測定値を補正するためのシステムおよび方法が提供される。オートフォーカスツールによって決定される高さは、焦点関心領域(ROI)における表面特徴角度および視野におけるROI箇所に依存し得るが、新しい誤差校正に基づいて補正される。誤差校正データには、画像における異なる特徴角度用の、および視野における複数の箇所用の高さ補正値が含まれる。高さ補正値は、例えばROIにおいて決定された勾配(エッジ)角度分布に基づき、角度依存性の誤差校正データを重み付けし、組み合わせることによって決定される。視野における複数のROI用にZ高さが決定されると、グローバル画像スタックの特定の画像からの画像データの記憶は、特定の画像が、十分に合焦された「近ピーク」焦点画像であるかどうかを、処理の初期に決定することに基づいて、効率的に制御することが可能である。
(もっと読む)
顔向き検知装置
【課題】サングラスを着用したひとの顔の中心位置の検出精度を向上させる。
【解決手段】顔向き検知装置10は、ひとの顔を撮像する乗員カメラ12から出力された顔画像から、撮像用光源14から照射された光の反射点を抽出する反射点抽出部21と、反射点の面積が最大となる1対の反射点を選択する反射点選択部22と、1対の反射点間の中心座標を算出する中心座標算出部23と、サングラス着用判定部27から出力された判定結果においてひとがサングラスを着用していると判定された場合に、中心座標算出部23から出力された中心座標に基づき、ひとの顔中心位置を検出する位置検出部28と、ひとの顔中心位置に基づき、ひとの顔向き方向を検知する顔向き検知部29とを備える。
(もっと読む)
照明灯検出方法
【課題】駅構内等の天井部等に設置された多数の照明灯の撮影画像に基づき各々の存在を正確に検出し、照明灯の自動清掃システムを実現できる照明灯検出方法を提供する。
【解決手段】この照明灯検出方法は、照明灯を可視光カメラ22によって撮影し画像データを得るステップS11と、二次元画像領域で任意な線33を設定し線上の複数画素に係る画像データを取り出し、画像データの中から輝度極大値に係る画素を検出し、この画素を初期検索位置に設定するステップS12と、初期検索位置を基準とし、検索範囲を設定し、画像データから照明灯候補の画素を検出するステップS13と、擬似形状画素を算出し、この擬似形状画素による擬似形状と照明灯候補画素とを比較して照明灯であるか否かを判断するステップS14を有する。
(もっと読む)
照明灯の三次元位置測定方法
【課題】駅構内等の天井部等に設置された多数の照明灯をカメラで撮影し、その画像に基づき多数の照明灯の各々の存在を検出し、その設置位置を三次元的に正確に測定し、照明灯の自動清掃システムを実現する照明灯の三次元位置測定方法を提供する。
【解決手段】本発明に係る照明灯の三次元位置測定方法は、測定対象となる照明灯11を検出する第1ステップS10と、検出した照明灯の三次元位置を測定する第2ステップとS20、その他の複数の照明灯について、測定対象となる照明灯が存在しなくなるまで第1ステップと第2ステップを繰り返す第3ステップS30とからなる方法である。
(もっと読む)
部品検査装置及びプログラム
【課題】複数の部品が任意に配置されている場合であっても、部品の配置による見え方の相違を吸収して大きさや形状等の外観を検査する。
【解決手段】複数の部品を撮影した画像をブロブ処理し、抽出されたエッジから求まるエッジ接線ベクトルを用いてエッジ接線画像に変換し、サンプルエッジ接線画像に対するマスターエッジ接線画像の畳み込み処理により抽出された個々のブロブに基づいて、マスター部品の所定部位のサイズ、位置xm、及び角度θmを定めたテーブルを用いて、検出されたサンプル部品の位置xs及び角度θsに対応するサイズを補完計算して、検出されたサンプル部品の所定部位のサイズと比較して、サンプル部品を検査する。
(もっと読む)
画像処理方法、画像処理装置、プログラムおよび記録媒体
【課題】 タイヤの種類、タイヤ表面の状態および照明の位置関係に依存することなく、検査の安定化および高精度化を図ることができる画像処理方法、画像処理装置、プログラムおよび記録媒体を提供する。
【解決手段】 制御部12は、タイヤ回転方向に直交する方向のラインごとに、取込画像の各画素の濃度を、各画素が含まれるライン上の平均濃度に変換して、濃度射影変換する。次に、濃度射影変換が行われた画像に対して、タイヤの回転方向のラインのうちの1つのライン上の画素について、フーリエ展開する。フーリエ展開された周波数成分からコード露出帯域の周波数成分を除いた残余の周波数成分を逆フーリエ展開し、逆フーリエ展開手段によって求めた逆フーリエ変換濃度と濃度射影変換によって求めた射影変換濃度との差分濃度を求め、差分濃度について、周期性があればコード露出と判定し、周期性がなければ刻印文字と判定して、コード露出欠陥検出処理を行う。
(もっと読む)
ステレオ映像内の視差探索範囲を求めるための方法及びシステム
【課題】シーンのステレオ画像のセットに基づいて該シーンの現在のステレオ画像のための視差探索範囲を求めるためのシステム及び方法を提供する。
【解決手段】ステレオ画像のセットからステレオ画像のサブセットを選択するステップであって、該サブセットは現在のステレオ画像及び少なくとも1つの隣接するステレオ画像を含み、該隣接するステレオ画像は現在のステレオ画像に時間的に隣接する、選択するステップと、ステレオ画像のサブセット内のステレオ画像毎に視差ヒストグラムを求めるステップであって、1組の視差ヒストグラムを形成する、求めるステップと、1組の視差ヒストグラム内の視差ヒストグラムの重み付けされた和として重み付け視差ヒストグラムを求めるステップと、重み付け視差ヒストグラムから視差探索範囲を求めるステップとを含む。
(もっと読む)
画像処理装置、その画像処理方法及びプログラム
【課題】
画像上に類似した線分が存在する場合や画像上に線分が密集している場合であっても、画像間の線分を正確に対応付けられるようにした技術を提供する。
【解決手段】
画像処理装置は、対象物体を異なる位置及び方向から撮影した画像を入力する入力手段と、前記入力手段により入力された複数の画像各々から前記対象物体を示す線分を検出する検出手段と、前記検出手段により検出された線分各々を識別するのに用いる特徴ベクトルを求める特徴導出手段と、前記特徴導出手段により求められた特徴ベクトルに基づいて前記複数の画像間における線分各々の対応付けを決定する決定手段とを具備し、前記特徴導出手段は、前記検出手段により検出された線分を通過し且つ該線分に平行でない方向に沿って参照ラインを設定し、当該参照ライン上において輝度が変化した画素の輝度情報をその順序に従って並べた情報を要素として含む特徴ベクトルを求める。
(もっと読む)
光学式位置検出装置および位置検出機能付き表示装置
【課題】広い範囲にわたって対象物体の位置を検出することのできる光学式位置検出装置、および当該光学式位置検出装置を備えた位置検出機能付き表示装置を提供すること。
【解決手段】光学式位置検出装置10において、検出領域10Rに対して一方側には、光強度分布形成用の発光素子12がX軸方向およびY軸方向に配列された光源ユニット120が配置されている。発光素子12から出射された赤外光からなる位置検出光L2は、検出領域10Rに検出光L2の光強度分布を形成するので、対象物体Obによって反射した検出光L3を光検出器30によって検出することができる。それ故、対象物体Obの位置を検出することができる。
(もっと読む)
特異部分分布特徴検出装置及び特異部分分布特徴検出方法
【課題】製品の表面にある特異部分の分布に関する特徴を検出すること。
【解決手段】特異部分分布特徴検出装置100は、製品の表面を撮影して表面画像を取得する画像取得部2と、その表面画像から複数の特異画素を含む処理対象画像を生成する処理対象画像生成部10と、その処理対象画像上に設定した直交XY座標系における特異画素の座標を取得する特異画素座標取得部11と、それら複数の特異画素の座標のうちの二つの座標のピッチと位相差との組み合わせを反復特性として導き出す反復特性導出部12と、ピッチGと位相差Rとを座標軸とする直交GR座標系を用いて、その組み合わせの直交GR座標系上の一座標への変換を実行し、その変換回数を座標毎に計数して計数結果を出力する座標系変換部13と、その計数結果の解析に基づいて複数の特異画素が形成する反復的特徴を検出する反復的特徴検出部14と、を備える。
(もっと読む)
車軸検知システム
【課題】タイヤの誤検知を抑制して、車軸の検知確率を改善した車軸検知システムを得る。
【解決手段】車両3の三次元データAを取得する三次元画像撮像装置1と、三次元データAに対して誤検知データ軽減処理を行う三次元データ閾値処理装置21と、誤検知データ軽減処理後の三次元データA’から検知領域Rでのゲート処理後の三次元データBを抽出する高さ・距離ゲート装置22と、検知領域Rを高さ方向に分割して総数N個の高さビンを作成し、ゲート処理後の三次元データBの高さヒストグラムCを作成する高さヒストグラム算出装置23と、高さヒストグラムCに基づきゲート処理後の三次元データBが所定数以上格納されたビン数nと高さ方向に分割したビン総数Nとの比率n/Nをデータ存在確率Pとして算出するデータ存在確率算出装置24と、データ存在確率Pに基づき検知フラグFを発生する検知フラグ発生装置25とを備えている。
(もっと読む)
画像処理装置および画像処理プログラム
【課題】3次元画像処理といった、複数の撮像部からそれぞれ生成される画像データを処理することのできる画像処理装置において、特定の画像処理に必要な複数の画像データをそれぞれ生成する複数の撮像部に対する各種設定を容易に行うことのできる画像処理装置を提供することである。また、そのような画像処理装置に向けられた画像処理プログラムを提供する。
【解決手段】接続される複数の撮像部をいくつかのグループに分けた上で、各グループに属する撮像部を一まとまりにして、必要な撮像条件を設定するためのユーザインターフェイスを提供する。
(もっと読む)
連続部品の検査方法、連続部品の検査プログラムおよび連続部品の検査装置
【課題】プレス加工等により所定の繰り返しピッチで複数個が帯状の材料に加工された連続部品に対する検査技術を提供する。
【解決手段】連続部品の検査方法は、正常品である連続部品の画像を取得する画像取得手順S1と、その画像から垂直エッジを検出してエッジピッチを求め、エッジピッチのヒストグラムを作成するエッジピッチヒストグラム作成手順S6と、連続部品の繰り返しピッチである基準ピッチを求める基準ピッチ算出手順S7と、連続部品が存在する画像領域の上限と下限を求め、その間の領域で基準ピッチ内に単一の部品が納まる画像領域を切り出すテンプレート領域抽出手順S8と、切り出された画像領域をテンプレートとして登録するテンプレート登録手順S9と、検査対象の連続部品の画像を取得し、テンプレートと基準ピッチとを用いて良否を判定する検査手順とを備える。
(もっと読む)
車両位置検出装置、車両位置検出方法、及び車両位置検出プログラム
【課題】広角画像を用いて行う、車線に対する車両の位置関係の検出の精度を良くする。
【解決手段】白線部分画像領域抽出処理S110は、道路を走行中の車両の走行方向に対する側方の方向を撮像した側方画像から、第一部分画像領域及び第二部分画像領域を抽出する。この2つの部分画像領域は、道路の路面上に描かれており当該車両が走行している車線の境界を表している白線の破線において当該破線の空線部分を挟み込んでいる白線部分が各々に映っている領域である。推定処理S112は、第一部分画像領域に映っている第一白線と第二部分画像領域に映っている第二白線とを滑らかに結ぶ推定線を側方画像上に推定する。この推定は、側方画像上での第一白線及び第二白線の各々についての線端の位置及び当該線端での向きに基づいて行われる。位置関係検出処理S113は、この推定線の側方画像上での位置に基づき、車線に対する車両の位置関係を検出する。
(もっと読む)
画像処理装置
【課題】ステレオ画像から求めたオクルージョン領域における視差の誤りを精度よく補正可能にする。
【解決手段】ステレオ画像として撮影された左右の画像から対応する画素間のずれ(視差)を示す視差マップを作成し、その視差マップから視差が急変する視差輪郭を求める(ステップS10、S12)。この視差輪郭を挟んで対向する一対の探索ウインドウを設定し(ステップS14)、その一対の探索ウインドウ内にある各画像の画像輪郭の強度(勾配)のうち、勾配の大きい方の画像に対応する探索ウインドウをオクルージョン領域を含む探索ウインドウとして判別し(ステップSS16、18)、オクルージョン領域が存在すると判別された探索ウインドウ内のオクルージョン領域の視差を、他方の探索ウインドウ側の視差に補正する(ステップS20、S22)。
(もっと読む)
自動車用の障害物検知方法
【課題】自動車の環境における障害物の検知方法を提供する。
【解決手段】画像処理により障害物の第1の検知を行って、少なくとも1つの対象領域を定義することと、所定の特徴に対して対象領域に付与される信頼性指数によって、検知された障害物を分類することと、1つまたは複数のセンサにより第1の閾値未満の閾値範囲で障害物の第2の検知を行って、所定の位置を得ることと、所定の位置を基準目印に投影することと、対象領域を前記基準目印に投影することと、得られた2個の投影を対応させて、この対応に応じて、分類された障害物に所定の位置を割り当てることと、の各ステップを備える。
(もっと読む)
検査パラメータ設定方法、検査性評価方法および検査システム
【課題】高多層プリント配線基板の配線パターンを検査する際に誤報告の少ないキャリブレーション位置を決定すると共に、その検査性を評価しベリファイ作業時間を予測することができる検査システムを提供する。
【解決手段】検査システムにおいて、検査対象のプリント配線基板を構成する各層のCADデータとその層構成情報を元に検査面より透視した輝度成分マップを生成する。そして検査面を構成する輝度成分の組を求め、全組を網羅する1つ以上の輝度評価領域を決定した後、検査装置にて領域を撮像、各輝度成分に対応する統計輝度値を求め輝度成分マップに代入し、検査閾値を決定するための最適キャリブレーション位置を求め検査を行う。
(もっと読む)
41 - 60 / 252
[ Back to top ]