
Fターム[2F065SS03]の内容
光学的手段による測長装置 (194,290) | 指示;記録 (4,025) | 指示、記録内容 (1,715) | キャラクター(文字、数字) (406)
Fターム[2F065SS03]に分類される特許
201 - 220 / 406
ロボット追従式画像検査装置
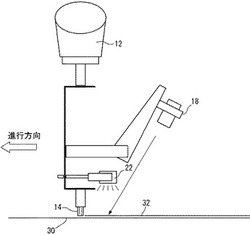
【課題】自動車用窓ガラスのプライマ塗布領域のような帯状の検査対象領域について、プライマ塗布状態等の検査対象を効率良く高精度で検査できるようにすることである。
【解決手段】検査対象物30上の帯状の検査対象領域を撮影して、この撮影した画像から検査する画像検査装置であって、撮影装置18および該撮影装置18が撮影する検査対象領域を照明する照明装置22を取付けたロボットハンド12と、該ロボットハンド12に取付けられた撮影装置18と照明装置22を検査対象領域上に設定された経路に沿って移動させるロボットハンド移動手段と、該ロボットハンド移動手段により前記撮影装置18が検査対象領域上の経路に沿って移動する際に該検査対象領域を連続撮影して画像を取得する画像取得手段とを備える。
(もっと読む)
計測装置

【課題】被検物の温度管理を行って高精度の形状測定が行える計測装置を提供すること。
【解決手段】被検物Mの形状を測定する計測装置であって、前記被検物の形状情報を採取する検出手段(形状センサ20)と、前記検出手段が形状情報を採取する前記被検物の温度を計測する温度計測部(赤外線カメラ30、温度測定回路43)と、前記温度計測部からの情報に基づき前記検出手段から検出された情報を基に出力する内容を変える制御手段(CPU40)と、を備える。
(もっと読む)
因子測定及び表示装置、因子測定及び表示方法、因子測定及び表示方法をコンピューターに実行させる因子測定及び表示プログラム、並びに、音響スキャナ
本発明は、因子測定及び表示装置、因子測定及び表示方法、因子測定及び表示方法をコンピューターに実行させる因子測定及び表示プログラム、並びに、音響スキャナに関する。本発明の因子測定及び表示方法は、感知しようとする因子が発生され、又は、内包されている平面、曲面、又は、空間で移動可能であり、因子を感知する、感知部を用いて前記因子を感知する感知段階と、前記平面、曲面、又は、空間を撮影し、前記平面、曲面、空間の画像データを生成する撮影段階と、前記感知部を標的にすることにより、前記感知段階で前記因子を感知すると同時に、前記感知部の位置を認識する感知位置認識段階と、前記感知段階で感知された因子を、前記感知位置認識段階で認識された位置にマッピングして、因子マップデータを生成する因子マップデータ生成段階と、前記因子マップデータを前記画像データに重ね合わせる重ね合わせ段階と、前記画像データに重ね合わせられた前記因子マップデータを表示するディスプレー段階と、を含む。  (もっと読む)
(もっと読む)
原盤ディフェクト測定装置、及び原盤ディフェクト測定方法
【課題】原盤カッティング機への設置が容易で、且つ光ディスク原盤の凹凸パターンに生じたディフェクトの位置及び大きさを情報量の少ないデータで取得、格納、及び処理することが可能な原盤ディフェクト測定装置、及び原盤ディフェクト測定方法を提供することを目的とする。
【解決手段】本発明によれば、原盤カッティング機10で用いられているフォーカスエラー信号及びインデックス信号を利用してディフェクトの検出を行うため、大幅な改造を行わずとも原盤ディフェクト測定装置50を原盤カッティング機10に容易に設置することができる。また、ディフェクトデータは信号のカウント値であるため情報量が少なく、短時間に多数のディフェクトが検出されても、ディフェクトデータの導出や伝送に不具合が生じることがない。
(もっと読む)
障害物検出装置、障害物検出システム及び障害物検出方法
【課題】低コントラストの障害物を検出でき、且つノイズとなる不要なエッジ点の検出を防止することができる障害物検出装置を提供する。
【解決手段】遠赤外線撮像装置1R,1Lが撮像して得た画像に基づいて障害物を検出する障害物検出装置3に、撮像して得た画像を構成する各画素の画素値に基づいて各画素のエッジ強度を算出する手段と、複数の所定画像部分毎にエッジ強度の度数分布を算出する手段と、障害物の輪郭に相当する所定数のエッジ点を検出するための閾値を、前記度数分布に基づいて前記所定画像部分毎に選択する閾値選択手段と、前記所定画像部分を構成する画素の画素値及び該所定画像部分で選択された閾値を比較することにより、該閾値以上の画素値を有するエッジ点を検出するエッジ点検出手段とを備え、前記エッジ点検出手段が検出したエッジ点に基づいて障害物を検出する処理を実行する制御部を備える。
(もっと読む)
自動車における最低地上高の測定方法及び自動車における最低地上高の測定装置
【課題】簡易な方法及び簡易な装置を用いて最低地上高を容易かつ確実に測定でき、その結果を自動車のオーナーに目視によって確認させることがでる。
【解決手段】測定対象自動車Cにおける測定対象部位Caを挟む当該測定対象自動車Cの乗り入れ面Daの一方側に、水平向きに可視レーザー光yを照射するレーザー照射装置10を上下動可能かつ旋回可能に備える地上高測定装置Aをセットし、他方の側に、当該レーザー照射装置10からのレーザー光yを受け、かつ、前記乗り入れ面Daからの高さ表示手段Ba’の施されている受け手段Bを備えさせ、この受け手段Bに向けて、前記レーザー照射装置10からレーザー光yを照射して測定対象自動車Cにおける測定対象部位Caの地上高を測定する。
(もっと読む)
被測定面の測定方法
【課題】ピッチング誤差やローリング誤差を抽出でき高精度な測定を行える被測定面の測定方法を提供する。
【解決手段】被測定面を回転させる場合における回転軸線の振れに相当するティルトモーション誤差は、被測定面を高精度に測定する上で除去すべきでものである。従来技術によれば、かかるティルトモーション誤差を簡易に除去する方法がなかった、これに対し本発明によれば、前記被測定面を備えた部材を回転させながら、前記第1の2次元角度センサにより前記第1の測定点の面法線角度を2次元で測定し、前記第2の2次元角度センサにより前記第2の測定点の面法線角度を2次元で測定し、前記第1の2次元角度センサの測定値に基づいて、前記第2の2次元角度センサの測定値からティルトモーション誤差を排除することができる。
(もっと読む)
表面状態検査のための情報登録方法および表面状態検査装置
【課題】撮像対象領域の設定を正確かつ効率良く行うとともに、必要以上の撮像が行われるのを防止できるようにする。
【解決手段】ワークWの表面の凹凸欠陥を検査するのに先立ち、毎時の撮像対象領域を定めながら、その領域を撮像するのに必要なカメラ1の位置および撮像方向を設定する。この設定処理では、ワークの表面形状を三角平面の集合体として表したCADデータを用いて被検査面全体の法線方向ヒストグラムを作成し、そのヒストグラムから撮像中心点の法線方向に対する角度差が所定の許容値以内になる平面を抽出することにより、検査可能範囲を認識する。また、検査に必要な強度の反射光の進行方向のばらつきを示す角度を特定し、その角度に基づく値を許容値として設定することにより、検査可能範囲の認識精度を確保する。
(もっと読む)
外観検査方法及びその装置および画像処理評価システム
【課題】外観検査において感度を高く設定すると虚報も多く検出してしまうため、高感度で検査することができないという問題があった。そのため、全体の欠陥捕捉率を高く維持しながら虚報を抑制することにより実質感度を向上する技術が必要であった。
【解決手段】
検出欠陥の画像をもとに画像特徴量を算出し、検出欠陥の位置座標をもとに座標特徴量を算出し、画像特徴量と座標特徴量のいずれかに対するしきい値処理からなる決定木に従って虚報判定を行う構成とする
【効果】上記画像特徴量と座標特徴量を利用し、決定木に従って虚報判定を行うことにより、実欠陥と虚報の識別を精度よく行うことができるため、虚報を抑制しつつ高感度に検査することができる。
(もっと読む)
自動車用開閉体の建付精度評価方法
【課題】インラインでのサイドドアの全数検査が可能であって、ボデイに実際のサイドドアを組み付けることなく、組み立てられた実際のサイドドアの建付精度の評価に同じく実際に生産されたボデイ側のドア開口部の形状を反映させて、ドアの建付精度の評価結果の信頼性向上を図った方法を提供する。
【解決手段】組み立てられたサイドドアDrまたはDf単独の実測データと、同じく組み立てられたボデイ単独での実測データとを、データ処理装置23においてボデイ座標系のドアヒンジ取付穴を基準に互いに突き合わせて、サイドドアのパーティング部での建付精度を演算・解析する。
(もっと読む)
寸法測定装置及び寸法測定方法
【課題】白色干渉縞のピーク位置を正確に検出可能な寸法測定装置及び寸法測定方法を提供する。
【解決手段】寸法測定装置1は、白色光源2からの光を、被測定物10に向かう第1の光束と第2の光束に分岐し、第1の光束と第2の光束の間に被測定物10の測定対象寸法に対応する第1の光路差を生じさせる第1の干渉計3と、第1の干渉計3を出射した光束を、参照鏡43に向かう第3の光束と光路に沿って移動可能な移動鏡44に向かう第4の光束に分岐して、第3の光束と第4の光束との間に第2の光路差を生じさせる第2の干渉計4と、第3及び第4の光束を受光し、第1の光路差と第2の光路差とが略等しい場合に生じる干渉信号を検出する検出器5と、移動鏡44の複数の位置での検出器5の出力の時間平均値又は移動平均値から干渉信号が最大値となる移動鏡44の位置を決定し、その位置から第2の光路差を求めて、測定対象寸法を求めるコントローラ6を有する。
(もっと読む)
寸法測定装置及び寸法測定方法
【課題】被測定物の表面粗さの程度によらず、その測定対象寸法を正確に測定できる寸法測定装置及び寸法測定方法を提供する。
【解決手段】寸法測定装置1は、白色光源2からの光を、被測定物に向かう第1の光束と第2の光束に分岐し、第1の光束と第2の光束の間に被測定物の測定対象寸法に対応する第1の光路差を生じさせる第1の干渉計3と、被測定物で散乱された光を検出する受光素子38と、第1の干渉計3を出射した光束を、参照鏡43に向かう第3の光束と光路に沿って移動可能な移動鏡44に向かう第4の光束に分岐して、第3の光束と第4の光束との間に第2の光路差を生じさせる第2の干渉計4と、第3及び第4の光束を受光し、第1の光路差と第2の光路差とが略等しい場合に生じる干渉信号を検出する検出器5と、被測定物の測定対象寸法を測定し、得られた測定値を受光素子38で受光した散乱光の光量に基づいて補正するコントローラ6を有する。
(もっと読む)
条材の測長方法とそれを用いた切断方法
【課題】長尺の条材を高精度でかつ短時間で測定する方法と、この測定する方法を用いて効率よく定尺長さに切断する方法との提供である。
【解決手段】ビレット28を搬送装置10により搬送しつつ、第一センサー18と第二センサー20とで搬送方向先端と後方とを検索する。第一センサー18がビレット28の先端を検出してから第二センサー20がビレット28を検出しなくなるまでのパルス数を測定する。搬送装置の1パルス当たりの搬送距離Pとパルス数とを乗算して通過長さL2を算出する。第一センサー18と第二センサー20とにより定まる間隔長さL1にこの通過長さL2を加算して、ビレット28の長さを算出する。このビレット28は、この長さ情報を基に切断装置12で定尺に切断される。第二センサーを複数にしてビレット28の後方を検索してビレット28の長さを算出してもよい。
(もっと読む)
指紋情報取得装置及びその製造方法
【課題】 封止樹脂層の形成時において高い精度を要求されることなく、センサ機能の損なわれることのない指紋情報取得装置及びその製造方法を提供する。
【解決手段】 指を接触させて指紋情報を取得する複数の画素領域で構成された指紋センサ2と、指紋センサ2が備える複数の画素領域のうち指紋情報の取得が可能な有効画素領域に係る有効座標情報を記憶する不揮発性メモリ素子5と、指紋センサ2に対して、所定の対象座標に位置する画素の読み出し指示を行う読み出し指示部51と、を備え、読み出し指示部51が、対象座標に係る前記指紋情報の読み出し指示を受けると、不揮発性メモリ素子5から有効座標情報を読み出すとともに、当該有効座標情報が示す有効座標と対象座標とに基づいて実際に読み出し対象となる修正対象座標を算出し、指紋センサ2に対して修正対象座標に位置する画素の読み出し指示を行う。
(もっと読む)
情報処理装置、および情報処理方法、並びにコンピュータ・プログラム
【課題】カメラの取得画像に基づいて撮影画像に含まれる特徴点の三次元位置を算出する構成を実現する。
【解決手段】カメラの取得画像に基づいて正規分布に従った存在確率分布を持つカメラ位置姿勢情報を生成し、さらに、カメラの取得画像に基づいて正規分布に従った特徴点追跡誤差分布を生成し、これらの正規分布に従った存在確率分布を持つカメラ位置姿勢情報と、正規分布に従った特徴点追跡誤差分布情報を適用して特徴点の三次元空間における存在確率分布を算出する。本構成によりカメラの取得画像に含まれる特徴点の三次元位置をより正確に解析すること可能となる。
(もっと読む)
画像処理によるトロリ線摩耗測定装置
【課題】2値化ラインセンサ画像の途中でトロリ線がなくなると画像を上下に横断していないのでトロリ線として認識せず背景のノイズとして処理してしまう問題を解決する。
【解決手段】ラインセンサ画像をMライン毎に区切って連続する番号を付したn番目のラインセンサ画像に対して、(n−1)番目のラインセンサ画像におけるMラインのうちのNライン(M≧N)であってn番目のラインセンサ画像に時系列的に連続する予備ライン画像及び(n+1)番目のラインセンサ画像におけるMラインのうちのNラインであってn番目のラインセンサ画像に時系列的に連続する予備ライン画像を連結して(M+2N)ラインよりなるラインセンサ画像を作成するので、画像の途中でなくなるトロリ線を背景のノイズとして処理することがなくなる。
(もっと読む)
姿勢角検出装置、姿勢角検出方法、及び床面検出装置
【課題】コストがかかることがなく、姿勢角または走行する平面を検出する。
【解決手段】距離演算部28は、受光装置20で受光された反射光に基づいて、床面上の複数の点までの距離Lm(i)を演算する。姿勢検出部30は、受光装置20の各受光素子の出力から演算された各々の距離Lm(i)と、複数の候補姿勢角θ´の各々の場合における距離計測装置12から床面までの理論上の各々の距離Lr(θ´)とに基づいて、姿勢角θを検出する。
(もっと読む)
透明膜の膜厚測定方法およびその装置
【課題】透過性を有する光学部材の表面を部分的に透明膜で被覆した測定対象物の当該透明膜の膜厚を干渉計を利用して求める。
【解決手段】表面を部分的に透明膜で被覆され、かつ、透過性を有する光学部材からなる測定対象物の裏面からの反射光と参照面からの反射光により生じる干渉縞波形のピークを検出し、当該ピークの位置情報を利用して光学部材の裏面高さを算出した後に、当該裏面高さと透明膜の既知の屈折率から透明膜の屈折率の影響を除去した物理膜厚を求める。
(もっと読む)
画像処理装置、画像処理プログラム、及び撮像装置
【課題】表示パネルの点・線欠陥を検出する場合に、回路規模の増大を回避し、利用効率の低下及び処理速度の低下を抑制し得る画像処理装置を提供する。
【解決手段】画像メモリ12の表示パネル画像データから水平1ライン分の画像データを読み込むアドレスを、垂直方向cn毎となるように設定する垂直メモリアドレス制御回路(入力用)23aと、水平1ラインの((h−1)×cm+1)の各画素データを連続して格納するh個のラインバッファメモリ24を1組として、v組設けたラインバッファメモリユニットと、水平ラインの各画素データを画像メモリ12から複数ライン分をライン毎に順に読み込み、ラインバッファメモリ24に格納する画像メモリ制御回路21と、ラインバッファメモリ24から出力された比較演算対象画素データを用いて画素間比較演算を行う比較演算処理回路25と、演算結果を格納する画像メモリ12とを備える。
(もっと読む)
画像処理によるトロリ線摩耗測定装置
【課題】トロリ線摩耗状態の測定後、所望の位置のトロリ線の状態を容易に確認することが可能なトロリ線摩耗測定装置を提供する。
【解決手段】検査車輌1の屋根上に設けられ、摩耗測定対象となるトロリ線3のパンタグラフ2との接触部を撮影するラインセンサ5から得られる輝度信号を、時系列的に並べてなるラインセンサ画像からトロリ線摩耗部の幅を算出すると共に、ラインセンサ5によってトロリ線3を撮影した時刻と、該時刻に対応する位置情報とを記録手段に記録するトロリ線摩耗測定手段を備えるトロリ線摩耗測定装置に、ラインセンサ画像と位置情報とを関連付けて、トロリ線摩耗部の幅とトロリ線の位置とを対応させたトロリ線摩耗測定結果と、トロリ線摩耗測定結果の画面出力に対応する測定箇所のラインセンサ画像とを、切り替え自在に画面に表示するトロリ線摩耗状態表示手段20を備えた。
(もっと読む)
201 - 220 / 406
[ Back to top ]